一种高温工件抓取装置
本发明属于自动化设备,具体涉及一种高温工件抓取装置。
背景技术:
1、在炼钢厂的工件加工初期,需从炼钢炉中抓取出高温待加工的工件雏形,并运送至下一阶段的加工机箱中进行二次处理,考虑到工件自身重量以及转运过程的安全性,传统工厂在此过程中多配置大量的人力,由一人负责工件的主要抓取以及转运,根据工件的重量,需要安排2~3人协助完成从炼钢炉中拖拽出高温工件的过程以及1~2人控制机械运输开关。
2、目前炼钢厂在工件抓取和搬运领域,多采用工件抓取机械手对处于炼钢炉中的高温工件进行抓取以及搬运,在整个过程中,通常会遇到以下几个问题:一、机械手常年处于高温的工作环境,前端夹爪需要对高温工件进行直接抓取,一段时间后,机械手前端尤其是夹爪部位会出现一定的变形,直接导致工件抓取的不稳定,容易出现工件掉落的问题;二、不同的工况,需要抓取的高温工件的现状重量都会存在差异,传统的机械手多只能运用在固定工况的炼钢厂中,在工件重量存在差异的情况下,只能增添或减少人力,机械手的适用范围较小;三、传统的机械手都较少会考虑工件抓取出炼钢炉后的转运问题,在处理长距离工件转运时,多采用运输带进行转运,实行成本较高。
3、针对以上问题,相关研究人员提出自动化高温工件抓取机械手进行解决,专利cn211806220u公开了一种设有冷却通道的自动化高温工件抓取机械手,该机构通过在固定座的一侧开设滑槽,滑槽内部设有滑块,滑块与机械臂固定,在靠近滑槽一侧设置丝杆槽以及丝杆,丝杆的一侧连接有电机,通过电机控制机械手的高温工件的抓取,同时机构内部设有冷却通道,冷却液流入冷却液槽的内部后从出液管流出,便于在夹持高温工件的过程中对其进行冷却,减少机械手的变形,但是发明者设计的机械手只能实现高温工件的抓取,未考虑工件的转运问题,需要配合运输带或是机械传动运行。
4、专利cn206263185u提出一种自动化高温工件抓取机械手,主要包括安装座、动力机构、机械臂和机械手,机械臂中间通过压杆连接位于安装座部位的动力机构,动力机构推动压杆升降实现对于机械手的控制,两侧机械臂都设有进水口和出水口,机械手外侧覆盖一层陶瓷纤维膜,内侧灌有冷却液,实现机械手的物力降温,防止机械手变形,提高机械手指的使用寿命,手指的末端凹槽凸块内设有永磁铁,加强了高温工件抓取的稳定性,提高了安全性能,该机械手通过永磁铁提高抓取工件的稳定,永磁铁的吸引力只有在达到一定距离后才会起到作用,考虑到高温的工作环境,永磁铁的作用较小,难以达到理想效果。
5、以上高温抓取机械手在使用过程中,未考虑工件自身重量、长度等客观因素产生的影响。在自动化高温工件抓取机械手工作的过程中,若出现工件过重的情况,会对工件的搬运带来影响,同时,工件尺寸的不同将会影响高温抓取机械手的抓取造成阻碍,影响使用;高温工件过重造成搬运不便以及长度不等导致抓取机械手不能有效平衡,从而有效抓取高温工件的问题,以及在工件转运过程中,工厂或采用自动化运输设备或配置大量人力,此过程往往伴随着大量的人力物力的消耗的问题亟需解决。
技术实现思路
1、本发明的目的是为了解决背景技术中提及的问题,提供一种高温工件抓取装置,在保证高温工件抓取稳定的前提下,节省搬运的人力消耗,提高工厂的工作效率,同时降低成本。
2、为实现上述技术目的,本发明采取的技术方案为:
3、一种高温工件抓取装置,包括电动葫芦、抓取机构和支撑机构,所述支撑机构吊装在电动葫芦上;所述抓取机构包括两根间隔设置的延长杆,两根延长杆之间连接有若干复位弹簧;两根延长杆上对称设有若干电磁铁,所述电磁铁设置在延长杆的中段或后段;两根延长杆上相对的两块电磁铁滑动连接在第一滑轨上,所述第一滑轨安装在支撑机构上;两根延长杆前端对称设有若干夹爪,所述夹爪伸出支撑机构;所述支撑机构设有配重装置,所述配重装置用于调节装置整体重心保持平衡;所述支撑机构底部设有若干万向轮。
4、作为优选,所述延长杆上套接有套筒,所述套筒滑动连接在支撑机构上,所述支撑机构设有限位机构用于限制延长杆在竖直方向的位移。
5、作为优选,所述限位机构为设置在支撑机构上的限位块,所述限位块设有与延长杆相匹配的通孔槽,所述通孔槽长度方向沿水平方向。
6、作为优选,所述支撑机构通过锁链吊挂在电动葫芦上;所述电动葫芦滑动连接在第二滑轨上,第二滑轨安装在墙体上。
7、作为优选,延长杆前端设有第一夹爪和第二夹爪,延长杆在第一夹爪和第二夹爪之间设有可拆卸连接点。
8、作为优选,所述支撑机构后端对称设有把手,所述把手末端设有防滑套。
9、作为优选,所述把手上设有电磁铁开关,所述电磁铁开关用于控制电磁铁通断电。
10、作为优选,所述夹爪可拆卸地连接在延长杆上。
11、作为优选,所述电磁铁通过耐高温材料与延长杆连接。
12、本发明的有益效果是:
13、1、在延长杆前端设置了第一夹爪和第二夹爪,并且在两个夹爪之间设有可拆卸连接点,从而可以根据不同工件的长度,更换位于前端的第二夹爪,根据工件的长度选择合适的第二夹爪(不同的第二夹爪到可拆卸连接点处的延长杆长度不同),同时夹爪可拆卸的连接在延长杆上,还可以根据不同规格的高温工件更换与之相匹配的夹爪,从而使得夹爪能平稳的抓取各种长度的高温工件,相较于单个夹爪,抓取的稳定性更高。
14、2、将抓取机构设置在支撑机构上,使得夹爪抓取到高温工件后,可以通过移动支撑机构(底部设有万向轮,方便移动)来将高温工件转运到目的地,加上支撑机构上的配重机构与高温工件的重量相抵消能保持支撑机构的平衡(无需再通过人力保持整个装置的平衡,更加省力),而支撑机构又吊装在电动葫芦上,通过电动葫芦辅助员工一起带动支撑机构移动,进一步减小了人员推动支撑机构所需的体力,且电动葫芦的设置使得在工件放下后无需调整配重依然可借助电动葫芦将整个装置还原至初始位置继续抓取;这些使得高温工件的抓取和转运工作都能通过单人实现,大大节省了人力,而且对需要长距离运输的高温工件来说,利用本装置运输高温工件比建立一套耐高温的运输带成本要低的多,进一步节省了成本。
15、3、电磁铁的通电能使两根延长杆相互靠近,从而使其前端的夹爪抓取高温工件,当需要放下高温工件时,使电磁铁断电两根延长杆即可在复位弹簧的作用下相互远离,从而使前端的夹爪分开放下高温工件,电磁铁设置在延长杆的中段或者后段,远离夹爪,并且采用耐高温材料与延长杆连接,避免了暴露与高温环境内,保证了电磁铁能有效运行,提高了整个装置的可靠性;而且本发明采用控制电磁铁通断电控制抓取机构的,区别于现有技术通过电机控制夹爪开合,在成本上有一定的减低,进一步节约了成本。
技术特征:
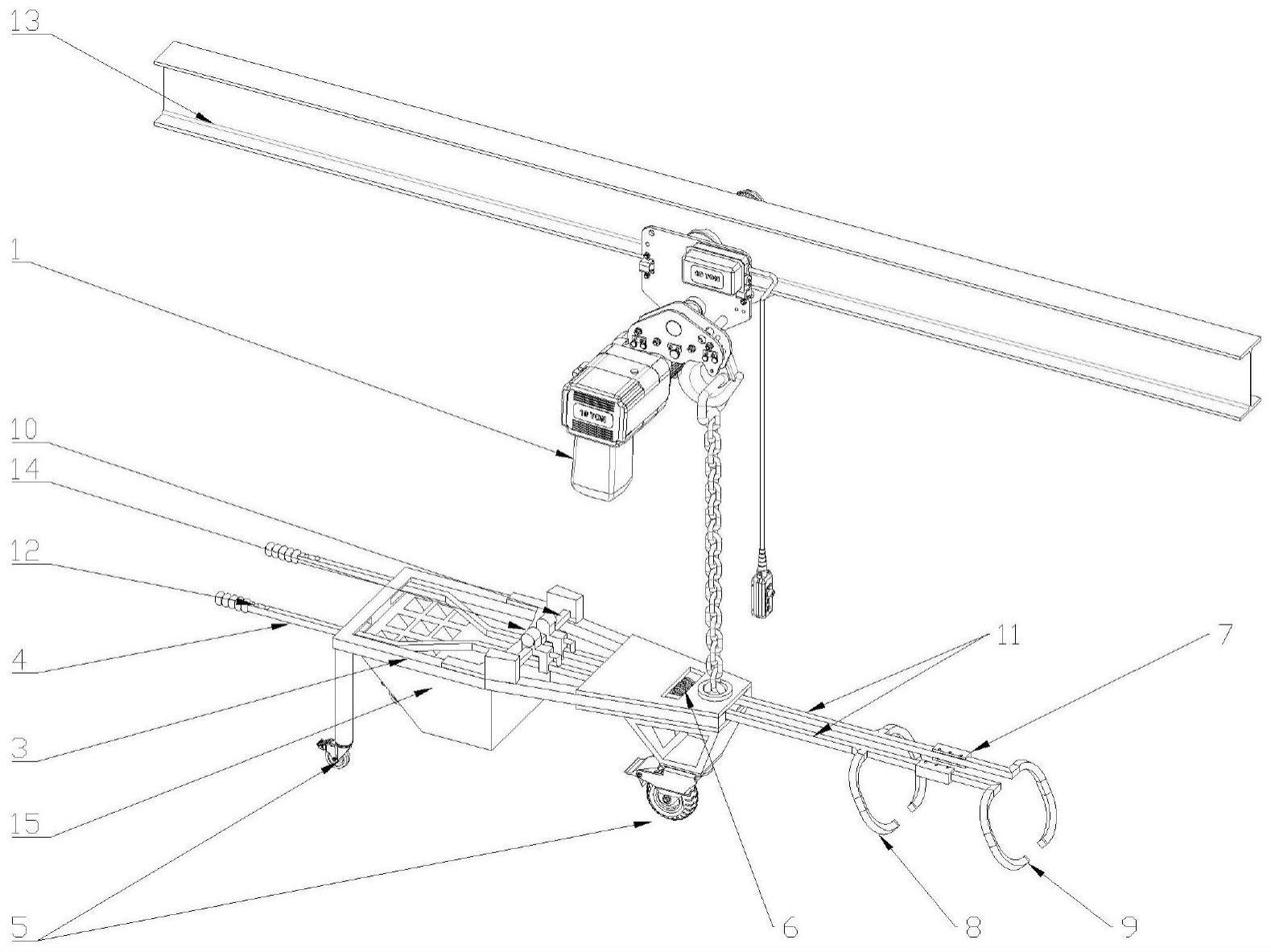
1.一种高温工件抓取装置,其特征在于:包括电动葫芦(1)、抓取机构(2)和支撑机构(3),所述支撑机构(3)吊装在电动葫芦(1)上;所述抓取机构(2)包括两根间隔设置的延长杆(11),两根延长杆(11)之间连接有若干复位弹簧(6);两根延长杆(11)上对称设有若干电磁铁(14),所述电磁铁(14)设置在延长杆(11)的中段或后段;两根延长杆(11)上相对的两块电磁铁(14)滑动连接在第一滑轨(10)上,所述第一滑轨(10)安装在支撑机构(3)上;两根延长杆(11)前端对称设有若干夹爪,所述夹爪伸出支撑机构(3);所述支撑机构(3)设有配重装置(15),所述配重装置(15)用于调节装置整体重心保持平衡;所述支撑机构(3)底部设有若干万向轮(5)。
2.根据权利要求1所述的一种高温工件抓取装置,其特征在于:所述延长杆(11)上套接有套筒(16),所述套筒(16)滑动连接在支撑机构(3)上,所述支撑机构(3)设有限位机构用于限制延长杆(11)在竖直方向的位移。
3.根据权利要求2所述的一种高温工件抓取装置,其特征在于:所述限位机构为设置在支撑机构(3)上的限位块,所述限位块设有与延长杆(11)相匹配的通孔槽,所述通孔槽长度方向沿水平方向。
4.根据权利要求1所述的一种高温工件抓取装置,其特征在于:所述支撑机构(3)通过锁链吊挂在电动葫芦(1)上;所述电动葫芦(1)滑动连接在第二滑轨(13)上,第二滑轨(13)安装在墙体上。
5.根据权利要求1所述的一种高温工件抓取装置,其特征在于:延长杆(11)前端设有第一夹爪(8)和第二夹爪(9),延长杆(11)在第一夹爪(8)和第二夹爪(9)之间设有可拆卸连接点(7)。
6.根据权利要求1所述的一种高温工件抓取装置,其特征在于:所述支撑机构(3)后端对称设有把手(4),所述把手(4)末端设有防滑套。
7.根据权利要求6所述的一种高温工件抓取装置,其特征在于:所述把手(4)上设有电磁铁开关(12),所述电磁铁开关(12)用于控制电磁铁(14)通断电。
8.根据权利要求1所述的一种高温工件抓取装置,其特征在于:所述夹爪可拆卸地连接在延长杆(11)上。
9.根据权利要求1所述的一种高温工件抓取装置,其特征在于:所述电磁铁(14)通过耐高温材料与延长杆(11)连接。
技术总结
本发明提供一种高温工件抓取装置,其特征在于:包括电动葫芦、抓取机构和支撑机构,所述支撑机构吊装在电动葫芦上;所述抓取机构包括两根间隔设置的延长杆,两根延长杆之间连接有若干复位弹簧;两根延长杆上对称设有若干电磁铁,所述电磁铁设置在延长杆的中段或后段;两根延长杆上相对的两块电磁铁滑动连接在第一滑轨上,所述第一滑轨安装在支撑机构上;两根延长杆前端对称设有若干夹爪,所述夹爪伸出支撑机构;所述支撑机构设有配重装置,所述配重装置用于调节装置整体重心保持平衡;所述支撑机构底部设有若干万向轮;本发明在保证高温工件抓取稳定的前提下,节省搬运的人力消耗,提高工厂的工作效率,同时降低成本。
技术研发人员:韩亚丽,曹璐刚,韩子瑒,朱晓军,许泉
受保护的技术使用者:南京工程学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!