一种无人自主装载车控制系统及方法与流程
本发明涉及一种无人自主装载车控制系统及方法,属于控制系统。
背景技术:
1、在现阶段的工业应用中,大部分工业机器人都是采用示教编程的工作模式,这种工作模式需要技术人员前期做大量的调试工作,而且一旦作业平台情况发生了变化,就需要重新调试,工作效率不高,不够智能化。
技术实现思路
1、为解决上述技术问题,本发明提供了一种无人自主装载车控制系统,该无人自主装载车控制系统
2、本发明通过以下技术方案得以实现。
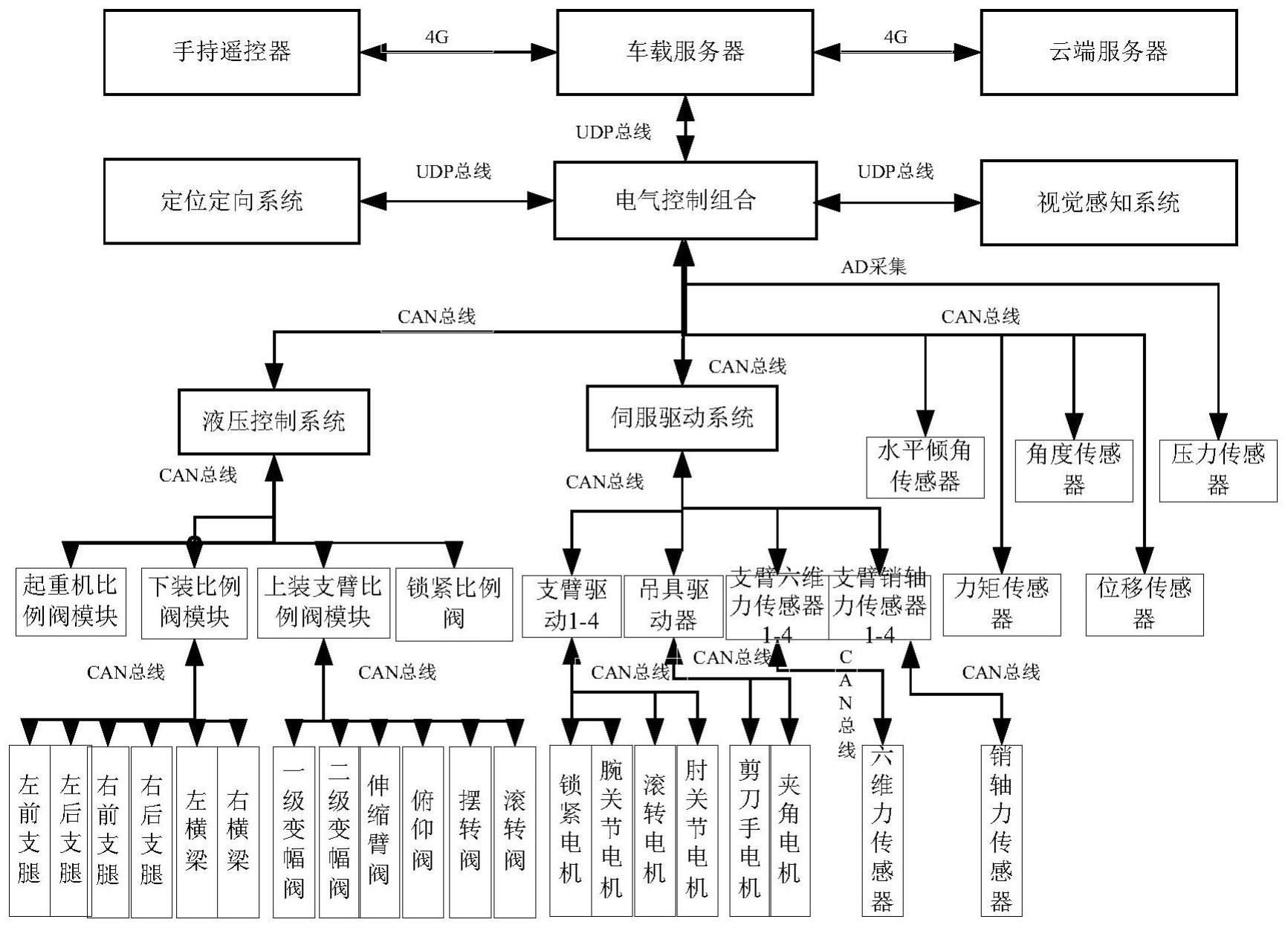
3、本发明提供的一种无人自主装载车控制系统,包括电气控制组合、伺服驱动系统、液压控制系统和传感器组,所述电气控制组合连接控制伺服驱动系统、液压控制系统和传感器组,液压控制系统通过比例阀模块控制动作油缸,伺服驱动系统通过驱动器控制电机,传感器组通过can总线连接电气控制组合。
4、所述液压控制系统和伺服驱动系统均通过can总线连接电气控制组合。
5、所述动作油缸包括上装支臂和支腿的动作油缸,其中液压控制系统通过上装支臂比例阀模块控制上装支臂的动作油缸,通过下装比例阀模块控制支腿的动作油缸;所述液压控制系统还连接控制有起重机比例阀模块和锁紧比例阀模块。
6、所述上装支臂的动作油缸包括俯仰油缸、摆转油缸、滚转油缸、一级变幅油缸、二级变幅油缸、支臂伸缩油缸、起重机油缸;所述支腿的动作油缸包括左前支腿油缸、支腿油缸、支腿油缸、支腿油缸、左右横梁油缸。
7、所述伺服驱动系统分别通过支臂驱动器和吊具驱动器控制支臂电机和夹爪电机;所述伺服驱动系统还连接有支臂六维力传感器和支臂销轴力传感器。
8、所述支臂电机包括锁紧电机、腕关节电机、滚转电机和肘关节电机;所述夹爪电机包括剪刀手电机和夹角电机。
9、所述电气控制组合还通过ad线路连接有压力传感器。
10、所述电气控制组合还通过udp总线连接有定位定向系统和视觉感知系统;所述电气控制组合还通过udp总线连接有车载服务器;车载服务器通过移动通信的方式与手持遥控器、云端服务器通信。
11、本发明还提供一种无人自主装载车控制方法,采用如上所述的无人自主装载车控制系统,包括如下步骤:
12、s1.通过定位定向系统定位车身大地坐标,获取货物箱坐标后通过对比货物箱与车身当前坐标位置进行路径规划,根据规划路径移动到货物箱附近;
13、s2.驻车展开,通过车辆支腿以及车载水平传感器进行整车调平,展开完成后通过车身摄像头进行目标货物箱捕捉,捕捉完成后计算出目标货物箱位置坐标,根据位置坐标规划上装支臂运动路径,上装支臂根据运动路径运动到目标货物箱上方定位对准;
14、s3.根据摄像头定位的目标孔位控制机械手抓取货物箱,货物箱抓取完成后上装起重机工作将目标货物箱吊起,完成后进行车辆撤收,电气控制组合上报服务器抓取完成。
15、还包括以下步骤:
16、s4.对比当前车辆坐标与被装载车辆坐标位置进行路径规划,装载车根据路径移动到被装载特种车辆位置附近,装载车开始驻车展开,通过车辆支腿以及车载水平传感器进行整车调平;
17、s5.通过摄像机捕捉被装载目标点位,目标点定位后根据坐标对比规划上装支臂运动路径,上装支臂运动到指定位置上方后机械手进行装载工作,装载过程中通过摄像机实时进行比对并调整机械手角度,当装载完成后电气控制组合上报服务器装载完成。
18、本发明的有益效果在于:能实时监控系统运行状态,可通过机械臂与机械手结合进行伸缩、抓取、下放动作实现目标的抓取与装载;通过引入高速总线易于实现整车装载动作同步进而实现无人自主装载。
技术特征:
1.一种无人自主装载车控制系统,其特征在于:包括电气控制组合、伺服驱动系统、液压控制系统和传感器组,所述电气控制组合连接控制伺服驱动系统、液压控制系统和传感器组,液压控制系统通过比例阀模块控制动作油缸,伺服驱动系统通过驱动器控制电机,传感器组通过can总线连接电气控制组合。
2.如权利要求1所述的无人自主装载车控制系统,其特征在于:所述液压控制系统和伺服驱动系统均通过can总线连接电气控制组合。
3.如权利要求1所述的无人自主装载车控制系统,其特征在于:所述动作油缸包括上装支臂和支腿的动作油缸,其中液压控制系统通过上装支臂比例阀模块控制上装支臂的动作油缸,通过下装比例阀模块控制支腿的动作油缸;所述液压控制系统还连接控制有起重机比例阀模块和锁紧比例阀模块。
4.如权利要求3所述的无人自主装载车控制系统,其特征在于:所述上装支臂的动作油缸包括俯仰油缸、摆转油缸、滚转油缸、一级变幅油缸、二级变幅油缸、支臂伸缩油缸、起重机油缸;所述支腿的动作油缸包括左前支腿油缸、支腿油缸、支腿油缸、支腿油缸、左右横梁油缸。
5.如权利要求1所述的无人自主装载车控制系统,其特征在于:所述伺服驱动系统分别通过支臂驱动器和吊具驱动器控制支臂电机和夹爪电机;所述伺服驱动系统还连接有支臂六维力传感器和支臂销轴力传感器。
6.如权利要求5所述的无人自主装载车控制系统,其特征在于:所述支臂电机包括锁紧电机、腕关节电机、滚转电机和肘关节电机;所述夹爪电机包括剪刀手电机和夹角电机。
7.如权利要求1所述的无人自主装载车控制系统,其特征在于:所述电气控制组合还通过ad线路连接有压力传感器。
8.如权利要求1所述的无人自主装载车控制系统,其特征在于:所述电气控制组合还通过udp总线连接有定位定向系统和视觉感知系统;所述电气控制组合还通过udp总线连接有车载服务器;车载服务器通过移动通信的方式与手持遥控器、云端服务器通信。
9.一种无人自主装载车控制方法,其特征在于:采用如权利要求1~8中任一项所述的无人自主装载车控制系统,包括如下步骤:
10.如权利要求9所述的无人自主装载车控制系统,其特征在于:还包括以下步骤:
技术总结
本发明提供了一种无人自主装载车控制系统,包括电气控制组合、伺服驱动系统、液压控制系统和传感器组,所述电气控制组合连接控制伺服驱动系统、液压控制系统和传感器组,液压控制系统通过比例阀模块控制动作油缸,伺服驱动系统通过驱动器控制电机,传感器组通过CAN总线连接电气控制组合。本发明还提供一种无人自主装载车控制方法。本发明能实时监控系统运行状态,可通过机械臂与机械手结合进行伸缩、抓取、下放动作实现目标的抓取与装载;通过引入高速总线易于实现整车装载动作同步进而实现无人自主装载。
技术研发人员:周永康,王海龙,陈双良,熊云,向振文,邹龑,冯洪熙,于兴超,桂占先
受保护的技术使用者:贵州航天天马机电科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!