立体仓储机器人的制作方法
本申请涉及仓储,特别是涉及一种立体仓储机器人。
背景技术:
1、货架自动化立体仓库,简称“立体仓库”。“立体仓库”为几层、十几层乃至几十层高的货架储存单元货物。为了方便取放物料,通常相关的搬运设备为仓储机器人(仓储机器人也可以称为agv小车或搬运车)来实现自动化搬运,大幅减少人工成本及运营成本,增加仓库储位。
2、相关的仓储机器人在使用过程中存在问题包括:在搬运物料时,物料放置在仓储机器人上难以避免的物料偏载放置,即物料的重心不在升降部件的中心位置处,使得升降部件容易发生偏斜,在进行换向时有明显的卡阻感,导致仓储机器人偏向物料重心的局部位置出现异常磨损,影响仓储机器人的使用寿命。
技术实现思路
1、本申请所解决的技术问题是要提供一种立体仓储机器人,其能有效地解决升降时不顺畅的问题。
2、针对上述技术问题,本申请提供了一种立体仓储机器人,包括:
3、第一框体,第一框体内置有第二框体和用于驱动第二框体沿竖直方向升降的升降组件;以及
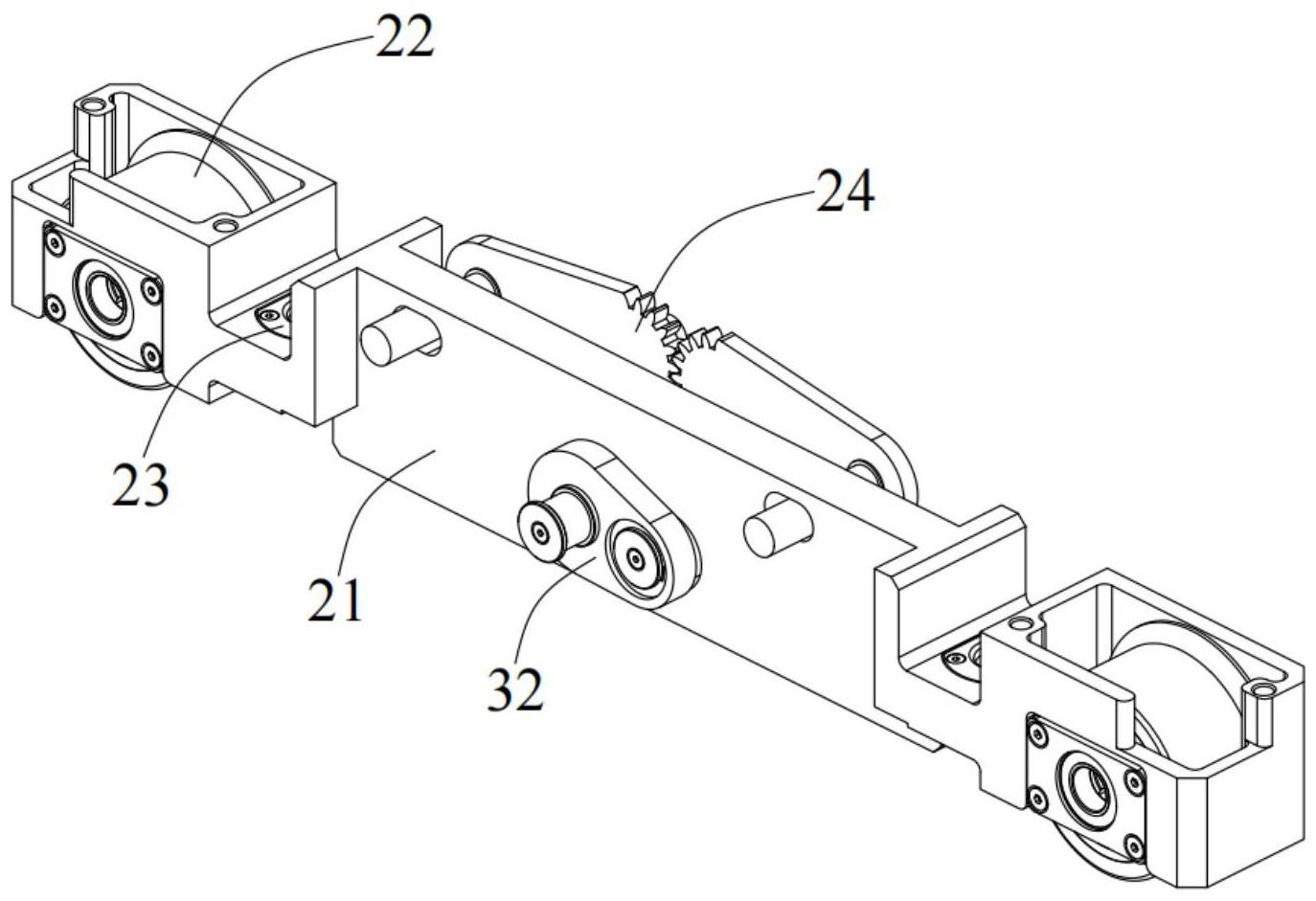
4、两相对设置的辅助曲杆,辅助曲杆的一端转动连接在第一框体上,另一端上设有支撑部,支撑部用以连接第二框体,两辅助曲杆以转动轴线为中心环设有相同的齿轮部,且两齿轮部相啮合,各辅助曲杆内转动轴线到支撑部的距离相等。
5、上述实施例中的立体仓储机器人,在升降组件驱使第二框体升降时,由于两辅助曲杆转动的长度和两齿轮部相同,通过第二框体升降带动两辅助曲杆相对转动,两辅助曲杆受相啮合的两齿轮部限制转过的距离,并且两辅助曲杆中转动轴线到支撑部的距离相等,使得两支撑部在转动时仍处于同一水平面上,而两支撑部承接第二框体,由支撑部支撑的第二框体也能够一直保持平衡,有效提高了升降时顺畅性,并且能够减小该仓储机器人偏向物料重心局部位置的磨损,以延长使用寿命。
6、在其中一种实施方式中,第二框体包括主体件,主体件上开设有对应支撑部的第二避让孔;
7、第二避让孔在主体件上沿垂直于竖直方向的直线方向延伸,支撑部穿设在第二避让孔,支撑部能够在第二避让孔内滑动。
8、在其中一种实施方式中,第二框体还包括行走轮,主体件的两端设有安装孔位,行走轮安装在安装孔位内。
9、在其中一种实施方式中,第一框体内部中空,第一框体内置有两平行设置的隔板,通过两隔板将第一框体内部分隔出第一空腔以及位于第一空腔两侧的第二空腔,两第二框体对应收容在两第二空腔内。
10、在其中一种实施方式中,辅助曲杆包括转轴,转轴装设在隔板上,且辅助曲杆位于第二空腔内。
11、在其中一种实施方式中,第二空腔内设有导向件,第二框体包括与导向件配合连接的导座;
12、在升降组件的驱使下,第二框体受导座与导向件限定沿竖直方向往复运动。通过导座与导向件限制第二框体的运动轨迹,并且由于两辅助曲杆保持第二框体平衡,能够降低导座与导向件的磨损,从而延长使用寿命。
13、在其中一种实施方式中,升降组件包括驱动器及安装在驱动器动力输出端上的顶升头,顶升头连接在第二框体上;在驱动器的驱使下,顶升头顶推第二框体。
14、在其中一种实施方式中,顶升头包括凸轮,凸轮的一端连接在驱动器动力输出端上,凸轮的另一端安装有轴套,轴套滑动连接在第二框体内。
15、在其中一种实施方式中,第二框体的主体件开设有第一避让孔,第一避让孔在主体件上沿垂直于竖直方向的直线方向延伸。
16、在其中一种实施方式中,驱动器设于第一空腔内,升降组件还包括同步连轴,同步连轴架设在两隔板上;
17、同步连轴的两端设有顶升头,驱动器驱使同步连轴运动。
技术特征:
1.一种立体仓储机器人,其特征在于,包括:
2.根据权利要求1所述的立体仓储机器人,其特征在于,所述第二框体(200)包括主体件(211),所述主体件(211)上开设有对应所述支撑部(243)的第二避让孔(212);
3.根据权利要求2所述的立体仓储机器人,其特征在于,所述第二框体(200)还包括行走轮(22),所述主体件(211)的两端设有安装孔位(214),所述行走轮(22)安装在所述安装孔位(214)内。
4.根据权利要求1所述的立体仓储机器人,其特征在于,所述第一框体(100)内部中空,所述第一框体(100)内置有两平行设置的隔板(13),通过两所述隔板(13)将所述第一框体(100)内部分隔出第一空腔(11)以及位于所述第一空腔(11)两侧的第二空腔(12),两所述第二框体(200)对应收容在两所述第二空腔(12)内。
5.根据权利要求4所述的立体仓储机器人,其特征在于,所述辅助曲杆(24)包括转轴(242),所述转轴(242)装设在所述隔板(13)上,且所述辅助曲杆(24)位于所述第二空腔(12)内。
6.根据权利要求4所述的立体仓储机器人,其特征在于,所述第二空腔(12)内设有导向件(14),所述第二框体(200)包括与所述导向件(14)配合连接的导座(23);
7.根据权利要求4-6中任一项所述的立体仓储机器人,其特征在于,所述升降组件(300)包括驱动器(31)及安装在所述驱动器(31)动力输出端上的顶升头(32),所述顶升头(32)连接在所述第二框体(200)上;在所述驱动器(31)的驱使下,所述顶升头(32)顶推所述第二框体(200)。
8.根据权利要求7所述的立体仓储机器人,其特征在于,所述顶升头(32)包括凸轮(321),所述凸轮(321)的一端连接在所述驱动器(31)动力输出端上,所述凸轮(321)的另一端安装有轴套(322),所述轴套(322)滑动连接在所述第二框体(200)内。
9.根据权利要求8所述的立体仓储机器人,其特征在于,所述第二框体(200)的主体件(211)开设有第一避让孔(211),所述第一避让孔(211)在所述主体件(211)上沿垂直于所述竖直方向的直线方向延伸。
10.根据权利要求7所述的立体仓储机器人,其特征在于,所述驱动器(31)设于所述第一空腔(11)内,所述升降组件(300)还包括同步连轴(33),所述同步连轴(33)架设在两所述隔板(13)上;
技术总结
本申请涉及一种立体仓储机器人,包括:第一框体,第一框体内置有第二框体和用于驱动第二框体沿竖直方向升降的升降组件;以及两相对设置的辅助曲杆,辅助曲杆的一端转动连接在第一框体上,另一端上设有支撑部,支撑部用以连接第二框体,两辅助曲杆以转动轴线为中心环设有相同的齿轮部,且两齿轮部相啮合,各辅助曲杆内转动轴线到支撑部的距离相等,通过两齿轮部限制两辅助曲杆相对转动所经过的距离,使得两辅助曲杆相对转动的距离相等,便于两支撑部承接的第二框体保持平衡,提高了换向的顺畅性,并且能够减小磨损延长使用寿命。
技术研发人员:程昌顺,郭科,卜浩飞,李宜傲
受保护的技术使用者:苏州魔仓机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!