包装盒堆垛机械手的制作方法
本发明涉及机械手,具体为包装盒堆垛机械手。
背景技术:
1、包装盒顾名思义就是用来包装产品的盒子,可以按材料来分类比如:纸盒,铁盒,木盒,布盒,皮盒,亚克力盒,瓦楞包装盒、pvc盒等,在将产品放置在包装盒内部后,需要将包装盒堆垛起来,为了节省人力,会通过机械手对包装盒进行堆垛,而目前的机械手在对包装盒进行抓取的时候,为了防止包装盒出现掉落的情况,会对包装盒施加较大的压力,可能会对包装盒的表面起到损坏的情况,影响包装盒的美观。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了在将产品放置在包装盒内部后,需要将包装盒堆垛起来,为了节省人力,会通过机械手对包装盒进行堆垛,而目前的机械手在对包装盒进行抓取的时候,为了防止包装盒出现掉落的情况,会对包装盒施加较大的压力,可能会对包装盒的表面起到损坏的情况,影响包装盒的美观的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:包装盒堆垛机械手,包括基座,所述基座上表面固定安装有保护箱,所述保护箱内部表面固定安装有第一伺服电机,所述第一伺服电机输出端固定安装有转盘,所述转盘上表面固定安装有安装架,所述安装架前表面固定安装有电动导轨,所述电动导轨中部套设安装有电动导块,所述电动导块前表面固定安装有支撑架,所述支撑架中部设置有驱动组件,所述驱动组件上安装有定位盘,所述定位盘上设置有夹紧机构。
5、作为优选,所述基座上等距贯穿开设有若干安装孔。
6、作为优选,所述保护箱上表面开设有滑槽,所述滑槽内部滑动安装有滑块,所述滑块上表面固定安装有导向杆,所述导向杆上端设置在转盘下表面。
7、作为优选,所述驱动组件包括第二伺服电机,所述支撑架上安装有第二伺服电机,所述第二伺服电机输出端固定安装有丝杆。
8、作为优选,所述丝杆中部套设安装有丝杆螺套,所述丝杆螺套侧面固定安装有移动块,所述移动块滑动安装在支撑架中部,所述移动块下表面安装有限位杆,所述定位盘固定安装在限位杆下端。
9、作为优选,所述夹紧机构包括第一安装夹板、液压缸,所述定位盘下表面等距固定安装有若干第一安装夹板,所述定位盘中部固定安装有液压缸。
10、作为优选,每个所述第一安装夹板两侧内壁之间均转动第一转轴,所述第一转轴侧面均固定安装有限位板,所述限位板下端均固定安装有抓臂。
11、作为优选,所述液压缸输出端固定安装有安装盘,所述安装盘下表面均等距固定安装有若干第二安装夹板,每个所述第二安装夹板两侧内壁均转动安装有第二转轴,所述限位板内表面固定安装有第三安装夹板,所述第三安装夹板两侧内壁之间转动安装有第三转轴,所述第三转轴与第二转轴之间通过连接杆连接。
12、作为优选,所述抓臂内部表面等距固定安装有若干第二弹簧,若干所述第二弹簧顶端固定安装有防滑板。
13、作为优选,每个所述抓臂内部表面开设有凹槽,所述凹槽两侧内壁之间转动安装有第四转轴,所述凹槽内部表面固定安装有第一弹簧,所述第一弹簧顶端设置在第四转轴侧面,所述第四转轴侧面固定安装有铲板,所述铲板顶端固定安装有铲头。
14、本发明提供了包装盒堆垛机械手。具备以下有益效果:
15、1、通过液压缸输出端进行伸缩,带动安装盘向上进行移动,此时便能够使若干限位板向相互靠近的方向进行移动,此时便能够使若干抓臂向相互靠近的一面进行移动,使若干防滑板贴合在包装盒的侧面,且因为第二弹簧的弹性,使防滑板对包装盒起到初步定位的作用,此时使若干抓臂向上进行移动,此时便能够使包装盒向上进行移动,在包装盒稍微向上移动一点的时候,此时通过液压缸输出端继续向上进行移动,此时便能够使若干抓臂继续向内翻转,此时便能够使若干铲板向相互靠近的一面进行移动,且将铲头设置在包装盒的若干低端,且因为铲板一端位于凹槽内部,且能够在一定的位置上进行翻转,在受到外部与包装盒压力时,此时便能够使若干铲头进行翻转,使铲头设置在包装盒的下端表面,此时若干铲板便能够向相互靠近的一面进行移动,使铲板设置在包装盒的下表面,对包装盒起到定位的作用,此装置不需要对包装盒施加太大的压力便能够对包装盒起到定位的作用,不仅不会对包装盒的侧面起到损坏的作用,还能保证包装盒的稳定性,不会出现掉落的情况。
16、2、通过第一伺服电机输出端驱动转盘进行转动,此时便能够使安装架进行转动,此时便能够调整支撑架的角度,此时通过电动导块在电动导轨中部进行移动,此时便能够调整支撑架的高度,从而便能够调整夹紧机构的位置,且通过第二伺服电机输出端驱动丝杆进行转动,使丝杆螺套在丝杆中部进行移动,此时便能够带动移动块进行来回移动,从而使夹紧机构进行来回移动,此装置能够随意调整夹紧机构的位置,提高了此装置的便捷性。
技术特征:
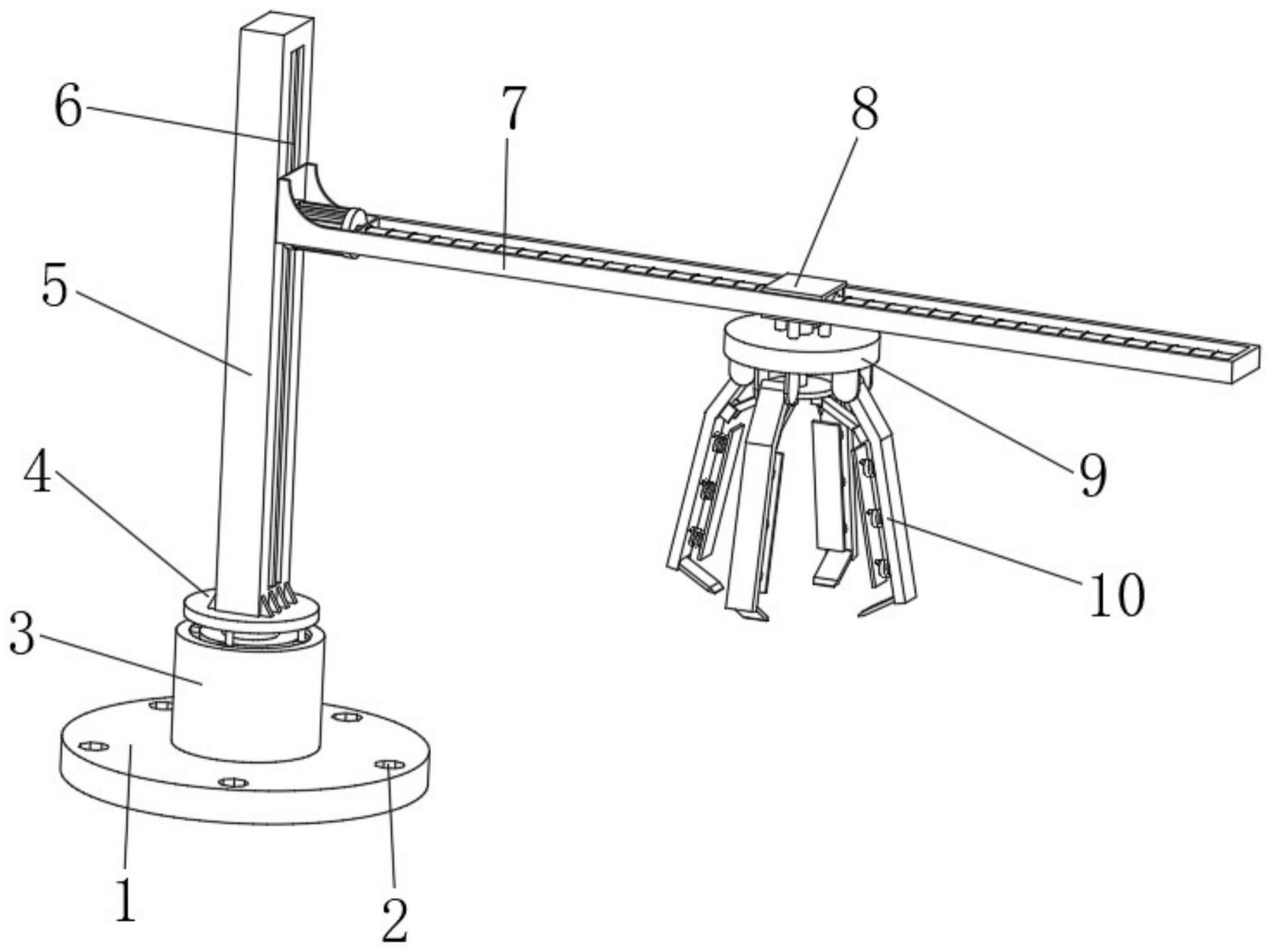
1.包装盒堆垛机械手,包括基座(1),其特征在于:所述基座(1)上表面固定安装有保护箱(3),所述保护箱(3)内部表面固定安装有第一伺服电机(11),所述第一伺服电机(11)输出端固定安装有转盘(4),所述转盘(4)上表面固定安装有安装架(5),所述安装架(5)前表面固定安装有电动导轨(6),所述电动导轨(6)中部套设安装有电动导块(15),所述电动导块(15)前表面固定安装有支撑架(7),所述支撑架(7)中部设置有驱动组件(8),所述驱动组件(8)上安装有定位盘(9),所述定位盘(9)上设置有夹紧机构(10)。
2.根据权利要求1所述的包装盒堆垛机械手,其特征在于:所述基座(1)上等距贯穿开设有若干安装孔(2)。
3.根据权利要求1所述的包装盒堆垛机械手,其特征在于:所述保护箱(3)上表面开设有滑槽(12),所述滑槽(12)内部滑动安装有滑块(13),所述滑块(13)上表面固定安装有导向杆(14),所述导向杆(14)上端设置在转盘(4)下表面。
4.根据权利要求1所述的包装盒堆垛机械手,其特征在于:所述驱动组件(8)包括第二伺服电机(801),所述支撑架(7)上安装有第二伺服电机(801),所述第二伺服电机(801)输出端固定安装有丝杆(804)。
5.根据权利要求4所述的包装盒堆垛机械手,其特征在于:所述丝杆(804)中部套设安装有丝杆螺套(803),所述丝杆螺套(803)侧面固定安装有移动块(802),所述移动块(802)滑动安装在支撑架(7)中部,所述移动块(802)下表面安装有限位杆(805),所述定位盘(9)固定安装在限位杆(805)下端。
6.根据权利要求1所述的包装盒堆垛机械手,其特征在于:所述夹紧机构(10)包括第一安装夹板(1004)、液压缸(1007),所述定位盘(9)下表面等距固定安装有若干第一安装夹板(1004),所述定位盘(9)中部固定安装有液压缸(1007)。
7.根据权利要求6所述的包装盒堆垛机械手,其特征在于:每个所述第一安装夹板(1004)两侧内壁之间均转动第一转轴(1005),所述第一转轴(1005)侧面均固定安装有限位板(1006),所述限位板(1006)下端均固定安装有抓臂(1001)。
8.根据权利要求7所述的包装盒堆垛机械手,其特征在于:所述液压缸(1007)输出端固定安装有安装盘(1008),所述安装盘(1008)下表面均等距固定安装有若干第二安装夹板(1009),每个所述第二安装夹板(1009)两侧内壁均转动安装有第二转轴(1010),所述限位板(1006)内表面固定安装有第三安装夹板(1012),所述第三安装夹板(1012)两侧内壁之间转动安装有第三转轴(1013),所述第三转轴(1013)与第二转轴(1010)之间通过连接杆(1011)连接。
9.根据权利要求8所述的包装盒堆垛机械手,其特征在于:所述抓臂(1001)内部表面等距固定安装有若干第二弹簧(1017),若干所述第二弹簧(1017)顶端固定安装有防滑板(1018)。
10.根据权利要求9所述的包装盒堆垛机械手,其特征在于:每个所述抓臂(1001)内部表面开设有凹槽(1014),所述凹槽(1014)两侧内壁之间转动安装有第四转轴(1016),所述凹槽(1014)内部表面固定安装有第一弹簧(1015),所述第一弹簧(1015)顶端设置在第四转轴(1016)侧面,所述第四转轴(1016)侧面固定安装有铲板(1002),所述铲板(1002)顶端固定安装有铲头(1003)。
技术总结
本发明提供包装盒堆垛机械手,涉及机械手技术领域,包括基座,所述基座上表面固定安装有保护箱,所述保护箱内部表面固定安装有第一伺服电机,所述第一伺服电机输出端固定安装有转盘,所述转盘上表面固定安装有安装架,所述电动导块前表面固定安装有支撑架,所述支撑架中部设置有驱动组件,所述驱动组件上安装有定位盘,所述定位盘上设置有夹紧机构,本发明通过液压缸输出端进行伸缩,带动安装盘向上进行移动,能够使若干铲头进行翻转,使铲头设置在包装盒的下端表面,此时若干铲板便能够向相互靠近的一面进行移动,使铲板设置在包装盒的下表面,对包装盒起到定位的作用,此装置不需要对包装盒施加太大的压力便能够对包装盒起到定位的作用。
技术研发人员:李春
受保护的技术使用者:德阳友宏包装制品有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!