物流机器人系统的制作方法
背景技术:
1、本公开整体涉及用于处理货物的机器人系统,并且更具体地涉及用于自动装载或卸载物流集装箱的机器人装载和卸载系统。装载货物的物流集装箱在世界各地移动以将产品递送到装载和卸载仓库。手动地从物流集装箱卸载物品和/或向物流集装箱装载物品是费力、重复的,而且容易受伤,使得这些工作出了名地难以达到高周转率。自动机器人替代方案已经用于帮助装载和卸载物流集装箱。然而,这些替代方案受到技术挑战和限制的困扰。通过所付努力、智慧和创新,包括在本公开的实施方案中的开发解决方案已经解决了许多这些识别的问题,本文详细描述了这些解决方案的许多示例。
技术实现思路
1、本文所述的各种实施方案涉及包括物流机器人系统的方法、装置和系统。
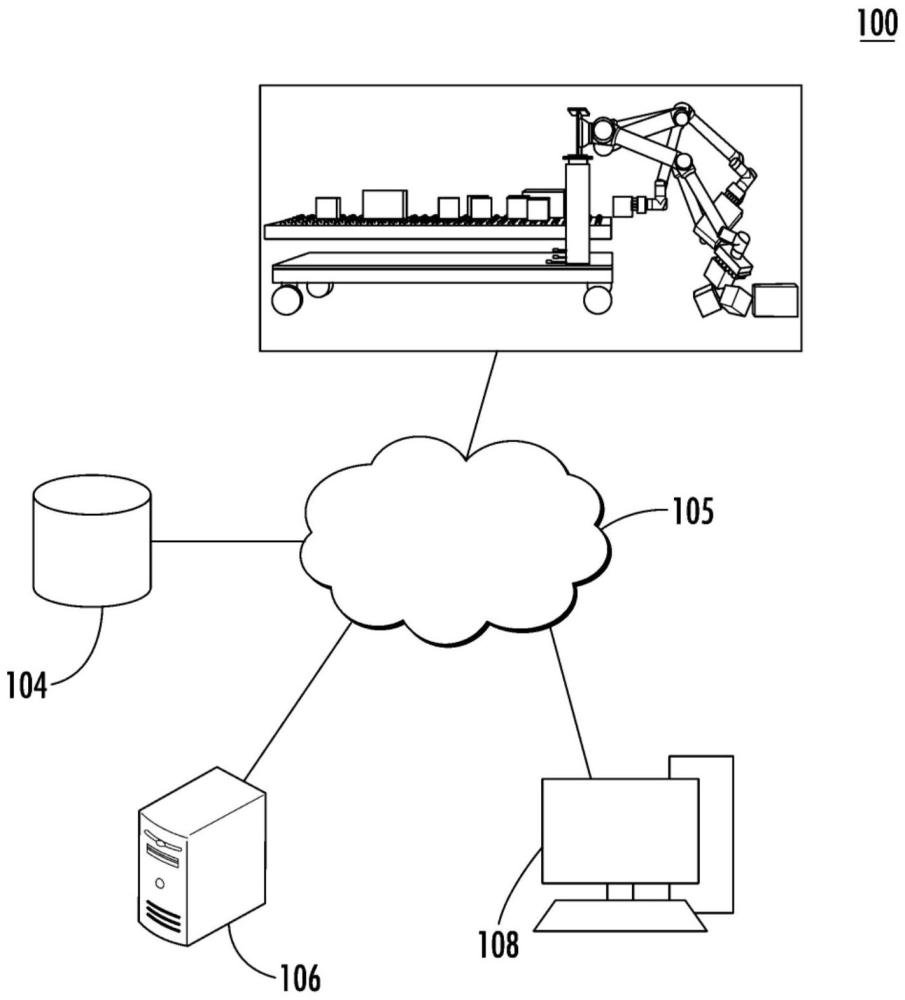
2、根据本公开的各种示例,一种机器人系统包括:可移动底座;设置在可移动底座上的传送机系统;竖直安装件,该竖直安装件通过一个或多个竖直致动设备耦接到可移动底座;和多个机器人操纵器,每个机器人操纵器具有安装到竖直安装件的第一端部和具有端部执行器的第二端部。
3、在一些实施方案中,传送机系统包括传送机表面。竖直安装件设置在传送机表面上方的阈值距离处。
4、在一些实施方案中,该多个机器人操纵器中的机器人操纵器包括被配置为在竖直平面中移动的六自由度机器人臂。
5、在一些实施方案中,该机器人操纵器被配置为将物品从集装箱传送到位于该机器人操纵器下方的传送机表面的对应部分。
6、在一些实施方案中,竖直安装件能够在多个竖直位置之间移动。每个相应的竖直位置与可移动底座相距相应的距离。
7、在一些实施方案中,传送机系统能够在竖直方向上移动,使得竖直安装件在该多个竖直位置中的每一个处设置在传送机表面上方的阈值距离处。
8、在一些实施方案中,竖直安装件的竖直位置基于集装箱的集装箱高度或设置在集装箱内的一个或多个物品的物品高度。
9、在一些实施方案中,该一个或多个竖直致动设备可操作以响应于:(i)该一个或多个物品在集装箱内的移动或(ii)集装箱内的物品布局来调整竖直安装件的竖直位置。
10、在一些实施方案中,竖直位置在集装箱高度的中间。
11、在一些实施方案中,端部执行器包括真空执行器。
12、在一些实施方案中,传送机系统包括一个或多个定向机构,这些定向机构可操作以调整放置在传送机系统的传送机表面上的物品的位置。
13、在一些实施方案中,该一个或多个定向机构包括一个或多个侧部致动器,这些侧部致动器被配置为将力施加到放置在传送机表面上的物品以将物品定位在传送机表面的中心部分。
14、在一些实施方案中,该机器人系统还包括传送机视觉系统。传送机视觉系统包括至少一个传送机相机,该传送机相机可操作以生成传送机数据,该传送机数据指示设置在传送机系统的传送机表面上的多个物品的布置。
15、在一些实施方案中,该至少一个传送机相机相对于传送机系统设置在固定位置。
16、在一些实施方案中,该机器人系统还包括控制器,该控制器通信地耦接到传送机系统并且被配置为基于传送机数据来自动地控制传送机系统。传送机系统被控制为将该多个物品布置在单独的流中。
17、在一些实施方案中,该机器人系统还包括机器人操纵器视觉系统。机器人操纵器视觉系统包括多个操纵器相机,这些操纵器相机可操作以生成指示集装箱内部的集装箱数据。机器人操纵器视觉系统不同于传送机视觉系统。
18、在一些实施方案中,该多个操纵器相机的数量和放置基于该多个机器人操纵器的数量。
19、在一些实施方案中,该机器人系统还包括控制器,该控制器通信地耦接到该多个机器人操纵器并且被配置为基于集装箱数据来自动地控制该多个操纵器。
20、根据本公开的各种示例,提供了一种方法。该方法包括:接收指示集装箱内部的集装箱数据;基于集装箱数据来生成用于相对于集装箱定位多个机器人操纵器的竖直定向指令;基于竖直定向指令来启动该多个机器人操纵器的竖直移动;以及控制该多个机器人操纵器中的至少一个以移动设置在集装箱内的物品。
21、在一些实施方案中,该方法还包括:接收指示设置在传送机系统的传送机表面上的多个物品的布置的传送机数据;基于传送机数据来生成用于将该多个物品布置在传送机表面上的分离的流中的布置指令;以及基于布置指令来控制传送机系统的至少一个部分以移动设置在传送机表面上的物品。该多个机器人操纵器和传送机系统设置在共享的可移动底座上。
22、上述例示性
技术实现要素:
以及本公开的其他示例性目的和/或优点以及实现这些目的和/或优点的方式在以下具体实施方式及其附图中进一步解释。
技术特征:
1.一种机器人系统,所述机器人系统包括:
2.根据权利要求1所述的机器人系统,其中所述传送机系统包括传送机表面,其中所述竖直安装件设置在所述传送机表面上方的阈值距离处。
3.根据权利要求2所述的机器人系统,其中所述多个机器人操纵器中的机器人操纵器包括被配置为在竖直平面中移动的六自由度机器人臂。
4.根据权利要求3所述的机器人系统,其中所述机器人操纵器被配置为将物品从集装箱传送到位于所述机器人操纵器下方的所述传送机表面的对应部分。
5.根据权利要求2至4中任一项所述的机器人系统,其中所述竖直安装件能够在多个竖直位置之间移动,其中每个相应的竖直位置与所述可移动底座相距相应的距离。
6.根据权利要求5所述的机器人系统,其中所述传送机系统能够在竖直方向上移动,使得所述竖直安装件在所述多个竖直位置中的每一个竖直位置处设置在所述传送机表面上方的所述阈值距离处。
7.根据权利要求5所述的机器人系统,其中所述竖直安装件的竖直位置基于集装箱的集装箱高度或设置在所述集装箱内的一个或多个物品的物品高度。
8.根据权利要求7所述的机器人系统,其中所述一个或多个竖直致动设备能够操作以响应于:(i)所述一个或多个物品在所述集装箱内的移动或(ii)所述集装箱内的物品布局,来调整所述竖直安装件的所述竖直位置。
9.根据权利要求7所述的机器人系统,其中所述竖直位置在所述集装箱的所述高度的中间。
10.一种方法,所述方法包括:
技术总结
本文所示的各种实施方案公开了一种机器人系统。该机器人系统包括:可移动底座,设置在该可移动底座上的传送机系统,通过一个或多个竖直致动设备耦接到该可移动底座的竖直安装件,和多个机器人操纵器,每个机器人操纵器具有安装到该竖直安装件的第一端部和具有端部执行器的第二端部。该多个机器人操纵器安装在该传送机系统上方并且在竖直位置中操作以单独地将物品装载到物流集装箱或从物流集装箱卸载物品。
技术研发人员:A·M·雷斯特
受保护的技术使用者:因特利格雷特总部有限责任公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!