一种气动物流运输多传输瓶连续接收系统及方法与流程
本发明涉及气动物流领域,更具体地说,它涉及一种气动物流运输多传输瓶连续接收系统及方法。
背景技术:
1、气动物流传输系统是集合先进的现代通讯技术和光机电一体化技术,将楼宇内的各个单元通过多条专用管道紧密地连接在一起,全面解决了楼宇内的物流自动配送问题。
2、气动物流依靠专用的传输瓶来运输物品,当该处的收发件较多、连接的科室较多时,也会安装多个收发站来进行接收和发送传输瓶;且由于设置多个收发站,因此一般会配备连续接收传输瓶的接收系统;
3、然而在此过程中如果不对传输瓶的速度加以控制,容易导致相邻进入连续接收组件内的传输瓶发生碰撞,从而导致传输瓶损坏。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种气动物流运输多传输瓶连续接收系统及方法,其解决了如何能够连续接收传输瓶的问题。
2、为实现上述目的,本发明提供了如下技术方案:
3、一方面本申请提供一种气动物流运输多传输瓶连续接收系统,包括数据采集系统、数据记录分析系统以及控制系统,所述数据采集系统连接有光源模块、光电传感器以及数据记录分析系统,所述光源模块、光电传感器均匀间隔安装于气动物流系统的传输管道内,所述数据记录分析系统连接控制系统,所述控制系统连接到气动物流系统的各个空气压缩机。
4、作为上述方案的进一步改进,
5、优选地,所述动物流系统包括:用于提供气动动力的空气压缩机;所述空气压缩机通过传输管道连接换向器,所述换向器通过传输管道连接有多组收发站组,每组收发站组由传输管道依次串联多个收发站;所述收发站连接发送组件和接收组件,所述发送组件能存储多个传输瓶并且将多个传输瓶依次发送,所述接收组件用于接收传输瓶;所述接收组件包括:弧形导轨,与多个收发站的出瓶点连通,用于接收传输瓶并将传输瓶送入倾斜导轨;倾斜导轨,用于接收各个连接管道输送的传输瓶;储存装置,用于储存倾斜导轨上的传输瓶。
6、优选地,所述控制系统通过控制相邻并行管道内的传输瓶进入同一个科室收发站的间距,从而控制各个收发站将传输瓶送入弧形导轨的时间以及将传输瓶送入倾斜导轨上的时间。
7、优选地,所述倾斜导轨同时接收多个弧形导轨送入的传输瓶,通过控制传输瓶进入倾斜导轨上的时间使得倾斜导轨上的传输瓶间距等同。
8、优选地,另一方面本申请提供一种控制方法包括以下步骤,
9、步骤一、通过数据采集系统采集数据;
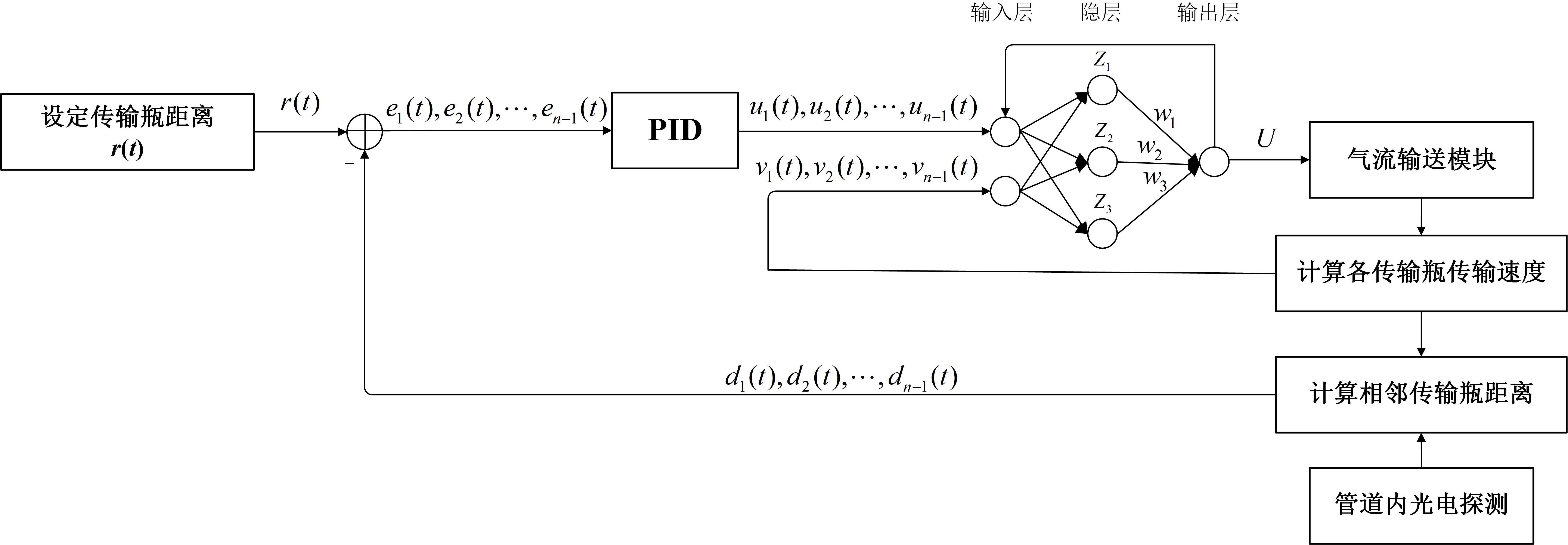
10、步骤二、将数据传输到数据记录分析系统,通过数据记录分析系统建立pid气流速度控制系统,同时搭建递归径向基rbf神经网络,建立一套基于递归径向基rbf神经网络与pid的气流速度复合控制系统;
11、步骤三、通过复合控制系统计算各空气压缩机的最优运行参数值;
12、步骤四、控制系统提取上述步骤的运行参数,同时控制各空气压缩机按照最优运行参数运行。
13、优选地,所述步骤二中pid气流速度控制系统的气流输送量控制律为,其中为各个控制量控制权重,其设定值满足,其中为比例系数,为积分系数,为微分系数,最终气流控制量满足。
14、优选地,所述步骤二中,将pid控制量及各传输瓶当前传输速度串行输入该神经网络,并将每一级控制量输入神经元与输出神经元相连,从而形成递归径向基rbf神经网络。
15、优选地,递归径向基rbf神经网络,各层具体计算过程如下,
16、径向基函数中心为:
17、
18、
19、其中,p为隐层神经元总个数,j为隐层神经元索引,min{u}/max{u}分别是训练集中所有输入控制量{u}的最小值/最大值,min{v}/max{v}分别是训练集中所有输入传输瓶速度{v}的最小值/最大值;
20、径向基函数宽度为:
21、
22、
23、其中,表示第n个控制量un输入时,递归径向基rbf神经网络中第j个隐层神经元的输出;
24、隐层到输出层的计算:
25、
26、u为神经网络最终输出,
27、为第j个隐层神经元权重。
28、权重迭代过程:
29、
30、
31、
32、e为损失函数,为当前各个传输瓶距离与设定值r(t)的均方差;
33、训练过程:
34、a) 初始化径向基函数中心、宽度、权重;
35、b) 计算损失,当损失值小于可接受阈值时停止训练,否则进行梯度更新;
36、返回第b)。
37、综上所述,本发明具有以下有益效果:
38、基于递归径向基rbf神经网络与pid的气流速度复合控制方法不仅可以对相邻并行输送管中传输瓶的距离进行非线性稳定控制,同时也分析各传输瓶额传输速度并输入复合控制系统中,利于进一步实现传输速度的稳定控制;通过控制传输速度进行缓冲,减少接瓶时间,提高传输效率。
技术特征:
1.一种气动物流运输多传输瓶连续接收系统,包括数据采集系统、数据记录分析系统以及控制系统,所述数据采集系统连接有光源模块、光电传感器以及数据记录分析系统,所述光源模块、光电传感器均匀间隔安装于气动物流系统的传输管道内,所述数据记录分析系统连接控制系统,所述控制系统连接到气动物流系统的各个空气压缩机,其特征在于,所述气动物流系统包括用于提供气动动力的空气压缩机;所述空气压缩机通过传输管道连接换向器,所述换向器通过传输管道连接有多组收发站组,每组收发站组由传输管道依次串联多个收发站;所述收发站连接发送组件和接收组件,所述发送组件能存储多个传输瓶并且将多个传输瓶依次发送,所述接收组件用于接收传输瓶;所述接收组件包括:弧形导轨,与多个收发站的出瓶点连通,用于接收传输瓶并将传输瓶送入倾斜导轨;倾斜导轨,用于接收各个连接管道输送的传输瓶;储存装置,用于储存倾斜导轨上的传输瓶。
2.根据权利要求1所述的气动物流运输多传输瓶连续接收系统,其特征在于,所述控制系统通过控制相邻并行管道内的传输瓶进入同一个科室收发站的间距,从而控制各个收发站将传输瓶送入弧形导轨的时间以及将传输瓶送入倾斜导轨上的时间。
3.根据权利要求2所述的气动物流运输多传输瓶连续接收系统,其特征在于,所述倾斜导轨同时接收多个弧形导轨送入的传输瓶,通过控制传输瓶进入倾斜导轨上的时间使得倾斜导轨上的传输瓶间距等同。
4.基于权利要求1-3任一所述的气动物流运输多传输瓶连续接收系统的接收方法,其特征在于,包括以下步骤,
5.根据权利要求4所述的接收方法,其特征在于,所述步骤二中pid气流速度控制系统的气流输送量控制律为,其中为各个控制量控制权重,其设定值满足,其中为比例系数,为积分系数,为微分系数,最终气流控制量满足。
6.根据权利要求5所述的接收方法,其特征在于,所述步骤二中,将pid控制量及各传输瓶当前传输速度串行输入该神经网络,并将每一级控制量输入神经元与输出神经元相连,从而形成递归径向基rbf神经网络。
7.根据权利要求6所述的接收方法,其特征在于,递归径向基rbf神经网络,各层具体计算过程如下,
技术总结
本申请涉及气动物流领域,尤其针对如何完成对气流速度的稳定控制,对多并行传输管道的传输瓶邻间距离进行非线性稳定控制,在接收端通过控制传输速度进行缓冲,减少接瓶时间,提高传输效率的问题,本申请公开了一种气动物流运输多传输瓶连续接收系统及方法,包括数据采集系统、数据记录分析系统以及控制系统,所述数据采集系统连接有光源模块、光电传感器以及数据记录分析系统,本申请可以对不同并行传输管内的多传输瓶的邻间距离进行非线性稳定控制,同时也分析各传输瓶传输速度并输入复合控制系统中,利于进一步实现各传输瓶传输速度的稳定控制;通过控制传输速度进行缓冲,减少接瓶时间,提高传输效率。
技术研发人员:刘军航,王桑
受保护的技术使用者:湖南捷工医疗科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!