一种起重机吊臂力矩平衡补偿装置及方法与流程
本发明涉及起重机,特别涉及一种起重机吊臂力矩平衡补偿装置及方法。
背景技术:
1、起重臂是起重机上的一个很重要的装置。起重臂俗称臂架、吊臂。支承起升绳、取物装置或变幅小车的双向压弯的金属结构件。由连接销轴、钢丝绳或液压缸支承在起重机的转台或塔身上。对于可俯仰摆动的起重臂,由变幅机构改变其倾角,以改变起重机的幅度和起升高度;水平的起重臂是用变幅小车在其上来回运动而改变幅度。按结构不同分为桁架起重臂和箱形起重臂;按功用不同分为起重机动臂、起重臂、副起重臂、伸缩臂、折叠臂、鹅首架等。
2、起重臂通常可旋转且可升降地设置于起重机的车体上,同时,通过升降油压缸使其成为立起状态,通过旋转马达而朝着规定的方向,将起重臂移动到合适的位置吊起重物。
3、然而,目前的起重机不能根据重物的重量自动对起重臂的力矩进行调节,因此,存在侧翻的风险;另外,目前的起重机没有力矩补偿机构,导致起重臂的工作区间范围受限。
技术实现思路
1、本发明的主要目的在于提出一种起重机吊臂力矩平衡补偿装置及方法,旨在提升起重机作业安全性。
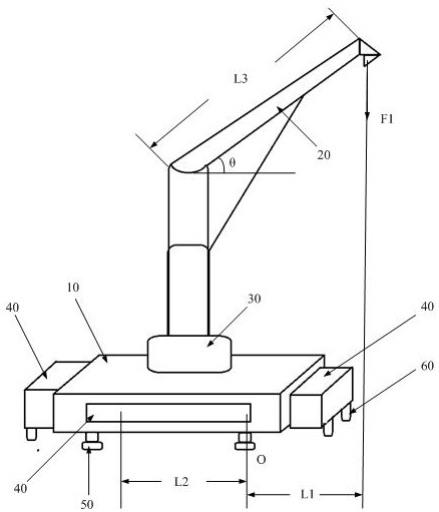
2、为实现上述目的,本发明提供了一种起重机吊臂力矩平衡补偿装置,包括:起重机车体、吊臂、支撑座、力矩调节机构以及控制器;其中,
3、所述支撑座为可伸缩结构,且底部活动设置于所述起重机车体上,所述吊臂的一端旋转设置于所述支撑座的顶部,所述吊臂的另一端用于吊运负载,所述控制器设置于所述起重机车体内;
4、所述控制器用于计算所述吊臂以及所述吊臂上的负载的力矩,并根据所述吊臂以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡。
5、本发明的进一步技术方案是,所述起重机车体上沿前后方向,和/或左右方向滑动设置有配重块,以及驱动所述配种块沿着所述车体前后方向,和/或左右方向运动的第一驱动电机,所述配重块、驱动电机构成所述力矩调节机构;
6、所述控制器还用于根据所述吊臂以及所述吊臂上的负载的力矩控制所述第一驱动电机驱动所述配重块沿着所述车体前后方向,和/或左右方向运动,调节所述力矩调节机构的力臂,使得所述吊臂保持平衡。
7、本发明的进一步技术方案是,所述支撑座活动设置于所述起重机车体上,所述起重机车体上设置有用于驱动所述支撑座相对于所述起重机车体前后运动或左右运动的第二驱动电机,所述支撑座、第二驱动电机构成所述力矩调节机构;
8、所述控制器还用于根据所述吊臂以及所述吊臂上的负载的力矩控制所述第二驱动电机驱动所述支撑座前后运动或左右运动,调节所述力矩调节结构的力臂,使得所述吊臂保持平衡。
9、本发明的进一步技术方案是,还包括设置于所述吊臂上的用于测量所述吊臂相对于水平面的夹角的角度传感器,以及用于测量所述吊臂的长度的长度传感器;
10、所述控制器还用于根据所述角度传感器测量得到的角度以及所述长度传感器测量得到的所述吊臂的长度计算所述吊臂以及所述吊臂上的负载的力矩。
11、本发明的进一步技术方案是,所述控制器还用于根据所述力矩调节机构的力臂控制所述吊臂的最大工作区域。
12、为实现上述目的,本发明还提出一种起重机吊臂力矩平衡补偿方法,所述方法应用于如上所述的起重机吊臂力矩平衡补偿装置,所述方法包括以下步骤:
13、获取所述吊载以及所述吊臂上的负载的力矩;
14、根据所述吊载以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡。
15、本发明的进一步技术方案是,所述根据所述吊载以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡的步骤包括:
16、根据所述吊臂以及所述吊臂上的负载的力矩控制所述第一驱动电机驱动所述配重块前后运动或左右运动,调节所述力矩调节机构的力臂,使得所述吊臂保持平衡。
17、本发明的进一步技术方案是,所述根据所述吊载以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡的步骤包括:
18、根据所述吊臂以及所述吊臂上的负载的力矩控制所述第二驱动电机驱动所述支撑座前后运动或左右运动,调节所述力矩调节结构的力臂,使得所述吊臂保持平衡。
19、本发明的进一步技术方案是,所述获取所述吊载以及所述吊臂上的负载的力矩的步骤包括:
20、根据所述角度传感器测量得到的角度以及所述长度传感器测量得到的所述吊臂的长度计算得到所述吊臂以及所述吊臂上的负载的力矩。
21、本发明的进一步技术方案是,所述根据所述吊载以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡的步骤之后还包括:
22、根据所述力矩调节机构的最大力臂计算得到所述吊臂的最大工作区域。
23、本发明起重机吊臂力矩平衡补偿装置及方法的有益效果是:
24、本发明通过上述技术方案,包括:起重机车体、吊臂、支撑座、力矩调节机构以及控制器;其中,
25、所述支撑座为可伸缩结构,且底部活动设置于所述起重机车体上,所述吊臂的一端旋转设置于所述支撑座的顶部,所述吊臂的另一端用于吊运负载,所述控制器设置于所述起重机车体内;所述控制器用于计算所述吊臂以及所述吊臂上的负载的力矩,并根据所述吊臂以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡,能防止起重机和所述吊臂发生侧翻事故,提升其使用安全性。
技术特征:
1.一种起重机吊臂力矩平衡补偿装置,其特征在于,包括:起重机车体、吊臂、支撑座、力矩调节机构以及控制器;其中,
2.根据权利要求1所述的起重机吊臂力矩平衡补偿装置,其特征在于,所述起重机车体上沿前后方向,和/或左右方向滑动设置有配重块,以及驱动所述配种块沿着所述车体前后方向或左右方向运动的第一驱动电机,所述配重块、驱动电机构成所述力矩调节机构;
3.根据权利要求1所述的起重机吊臂力矩平衡补偿装置,其特征在于,所述支撑座活动设置于所述起重机车体上,所述起重机车体上设置有用于驱动所述支撑座相对于所述起重机车体前后运动或左右运动的第二驱动电机,所述支撑座、第二驱动电机构成所述力矩调节机构;
4.根据权利要求1至3任意一项所述的起重机吊臂力矩平衡补偿装置,其特征在于,还包括设置于所述吊臂上的用于测量所述吊臂相对于水平面的夹角的角度传感器,以及用于测量所述吊臂的长度的长度传感器;
5.根据权利要求1所述的起重机吊臂力矩平衡补偿装置,其特征在于,所述控制器还用于根据所述力矩调节机构的力臂控制所述吊臂的最大工作区域。
6.一种起重机吊臂力矩平衡补偿方法,其特征在于,所述方法应用于如权利要求1至5任意一项所述的起重机吊臂力矩平衡补偿装置,所述方法包括以下步骤:
7.根据权利要求6所述的起重机吊臂力矩平衡补偿方法,其特征在于,所述根据所述吊载以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡的步骤包括:
8.根据权利要求6所述的起重机吊臂力矩平衡补偿方法,其特征在于,所述根据所述吊载以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡的步骤包括:
9.根据权利要求6至8任意一项所述的起重机吊臂力矩平衡补偿方法,其特征在于,所述获取所述吊载以及所述吊臂上的负载的力矩的步骤包括:
10.根据权利要求6所述的起重机吊臂力矩平衡补偿方法,其特征在于,所述根据所述吊载以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡的步骤之后还包括:
技术总结
本发明公开了一种起重机吊臂力矩平衡补偿装置及方法,该装置包括:起重机车体、吊臂、支撑座、力矩调节机构以及控制器;其中,所述支撑座为可伸缩结构,且底部活动设置于所述起重机车体上,所述吊臂的一端旋转设置于所述支撑座的顶部,另一端用于吊运负载,所述控制器设置于所述起重机车体内;所述控制器用于计算所述吊臂以及所述吊臂上的负载的力矩,并根据所述吊臂以及所述吊臂上的负载的力矩,依据杠杆平衡原理调节所述力矩调节机构的力臂,使得所述吊臂保持平衡。相对于现有技术,本发明能防止起重机和所述吊臂发生侧翻事故,提升其使用安全性。
技术研发人员:李俊,罗宇
受保护的技术使用者:深圳安衡达电气有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!