一种用于基板料盒取放运输的复合机器人的制作方法
本发明涉及基板运输的,更具体的说,它涉及一种用于基板料盒取放运输的复合机器人。
背景技术:
1、在基板加工过程中,根据生产的工艺环节不同,需要将基板在多个不同的设备上分别进行加工处理,也就是说需要进行不同生产环节的加工;为了方便在不同的生产环节之间对基板进行运输,一般都是将基板放置在基板料盒当中在进行运输,在一个基板料盒当中可以放置多个基板,基板料盒能够在运输过程当中起到对基板进行保护的作用,使得基板能够在不同生产环节之间进行安全转移。
2、基板料盒在进行运输的时候,可以通过运输小车来进行运输,但是将基板料盒放置在运输小车和从运输小车上取下基板料盒都需要人工进行操作,既浪费了大量人力,还降低了生产效率。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种用于基板料盒取放运输的复合机器人,其通过料盒夹取装置在运输料及与加工设备之间进行料盒的夹取移送,无需人工进行料盒的上下料操作,节省了人力,提高了生产效率。
2、为实现上述目的,本发明提供了如下技术方案:一种用于基板料盒取放运输的复合机器人,包括运输小车,所述运输小车在各加工设备之间进行移动;
3、运输料架,所述运输料架设置在运输小车上并且用于对料盒进行收纳;
4、以及料盒夹取装置,所述料盒夹取装置用于在加工设备与运输料架之间进行料盒的夹取转移,所述料盒夹取装置设置在加工设备处或运输小车上。
5、本发明进一步设置为:所述料盒夹取装置包括机械臂,所述机械臂设置在运输小车上或生产设备旁;
6、以及夹取机构,所述夹取机构设置在机械臂上并且由机械臂带动进行位置移动;
7、所述夹取机构包括夹指,所述夹指设置有两组,两组夹指朝向相互靠近和相互远离的方向移动以实现对料盒的夹紧和放松。
8、本发明进一步设置为:所述夹取机构中每一组包括多个夹指且两组的多个夹指一一对应,同一组的多个夹指沿料盒的排布方向排布,每一个料盒至少被相对应的两夹指夹紧。
9、本发明进一步设置为:所述夹取机构还包括导轨,所述导轨的位置固定;
10、以及滑块,所述滑块设置在连接板上并且能够在导轨上沿夹指的滑动方向滑动。
11、本发明进一步设置为:所述料盒夹取装置还包括拨料机构,所述拨料机构包括拨料板,所述拨料板设置有两个,两所述拨料板中至少一拨料板设置为移动拨料板,所述移动拨料板通过滑动控制两拨料板之间的距离,所述移动拨料板的滑动方向沿多个料盒的排布方向设置。
12、本发明进一步设置为:所述料盒夹取装置还包括压紧机构,所述压紧机构压紧在料盒顶部。
13、本发明进一步设置为:所述运输料架包括架体,所述架体固定连接在运输小车顶部,所述架体上设置有多个容纳空间;
14、托板,每一个所述容纳空间中都设置有托板,所述托板通过滑动从容纳空间内伸出和缩入,所述托板用于承载料盒;
15、以及压件机构,所述压件机构用于将料盒压紧在回缩如容纳空间中的托板上。
16、本发明进一步设置为:所述压件机构包括压件板,每一个容纳空间对应至少一个压件板,压件板将料盒压紧在回缩如容纳空间中的托板上。
17、本发明进一步设置为:所述压件机构还包括升降件,所述升降件用于带动压件板上下升降以控制压件板对料盒的压紧和放松。
18、本发明进一步设置为:所述托板两侧设置有伸缩轨,所述伸缩轨包括固定部和滑动部,固定部固定在架体上,滑动部在固定部上滑动,所述托板与滑动部连接从而使滑动部带动托板伸出和缩入容纳空间。
19、综上所述,本发明相比于现有技术具有以下有益效果:本发明通过料盒夹取装置在运输料及与加工设备之间进行料盒的夹取移送,无需人工进行料盒的上下料操作,节省了人力,提高了生产效率。
技术特征:
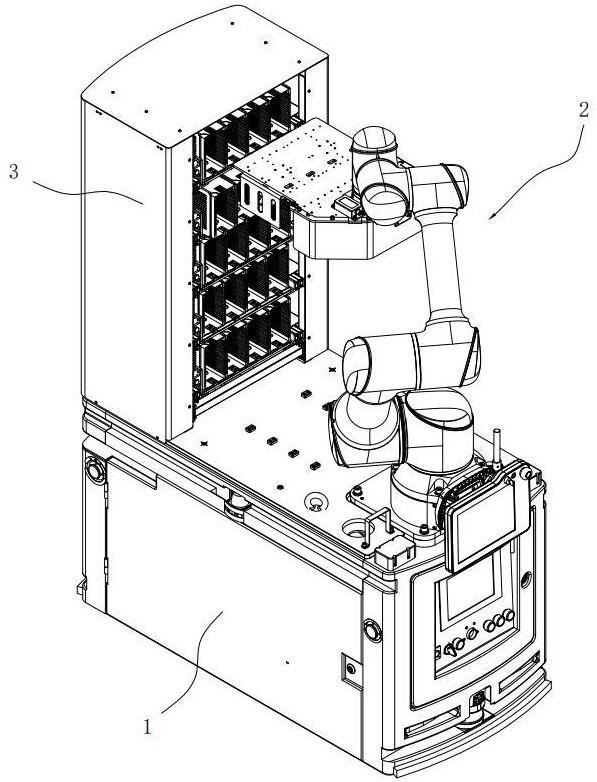
1.一种用于基板料盒取放运输的复合机器人,其特征在于:包括运输小车(1),所述运输小车(1)在各加工设备之间进行移动;
2.根据权利要求1所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述料盒夹取装置(2)包括机械臂(21),所述机械臂(21)设置在运输小车(1)上或生产设备旁;
3.根据权利要求2所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述夹取机构(23)中每一组包括多个夹指(231)且两组的多个夹指(231)一一对应,同一组的多个夹指(231)沿料盒的排布方向排布,每一个料盒至少被相对应的两夹指(231)夹紧。
4.根据权利要求3所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述夹取机构(23)还包括导轨(233),所述导轨(233)的位置固定;
5.根据权利要求4所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述料盒夹取装置(2)还包括拨料机构(24),所述拨料机构(24)包括拨料板(241),所述拨料板(241)设置有两个,两所述拨料板(241)中至少一拨料板(241)设置为移动拨料板(241),所述移动拨料板(241)通过滑动控制两拨料板(241)之间的距离,所述移动拨料板(241)的滑动方向沿多个料盒的排布方向设置。
6.根据权利要求5所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述料盒夹取装置(2)还包括压紧机构(25),所述压紧机构(25)压紧在料盒顶部。
7.根据权利要求1所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述运输料架(3)包括架体(31),所述架体(31)固定连接在运输小车(1)顶部,所述架体(31)上设置有多个容纳空间(311);
8.根据权利要求7所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述压件机构(33)包括压件板(331),每一个容纳空间(311)对应至少一个压件板(331),压件板(331)将料盒压紧在回缩如容纳空间(311)中的托板(32)上。
9.根据权利要求8所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述压件机构(33)还包括升降件(336),所述升降件(336)用于带动压件板(331)上下升降以控制压件板(331)对料盒的压紧和放松。
10.根据权利要求9所述的一种用于基板料盒取放运输的复合机器人,其特征在于:所述托板(32)两侧设置有伸缩轨(34),所述伸缩轨(34)包括固定部(341)和滑动部(342),固定部(341)固定在架体(31)上,滑动部(342)在固定部(341)上滑动,所述托板(32)与滑动部(342)连接从而使滑动部(342)带动托板(32)伸出和缩入容纳空间(311)。
技术总结
本发明公开了一种用于基板料盒取放运输的复合机器人,其技术方案要点是包括运输小车,所述运输小车在各加工设备之间进行移动;运输料架,所述运输料架设置在运输小车上并且用于对料盒进行收纳;以及料盒夹取装置,所述料盒夹取装置用于在加工设备与运输料架之间进行料盒的夹取转移,所述料盒夹取装置设置在加工设备处或运输小车上;通过料盒夹取装置在运输料及与加工设备之间进行料盒的夹取移送,无需人工进行料盒的上下料操作,节省了人力,提高了生产效率。
技术研发人员:刘长勇,郝启,闫俊存,谢瑞康,吕丹,宋艳
受保护的技术使用者:青岛新松机器人自动化有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!