可移动式的智能码垛设备和码垛方法与流程
本发明涉及智能仓储码垛,尤其是一种可移动式的智能码垛设备和码垛方法。
背景技术:
1、在现代仓储物流系统中,为了提升生产效率、降低人力成本,一般都会使用到智能化的码垛机器人,码垛机器人具有灵活的机械臂,可以对多种不同的货物进行码垛。如公告号为cn207404508u的中国实用新型专利即公开了一种机械手双线码垛系统,与该专利文献类似,现有的码垛机器人通常是固定在指定的位置,只能在指定的区域进行作业,导致其适用性较差。
技术实现思路
1、本发明提供一种可移动式的智能码垛设备和码垛方法,可以整体移动,灵活布置,适用性更强。
2、为解决上述问题,本发明采用如下技术方案:
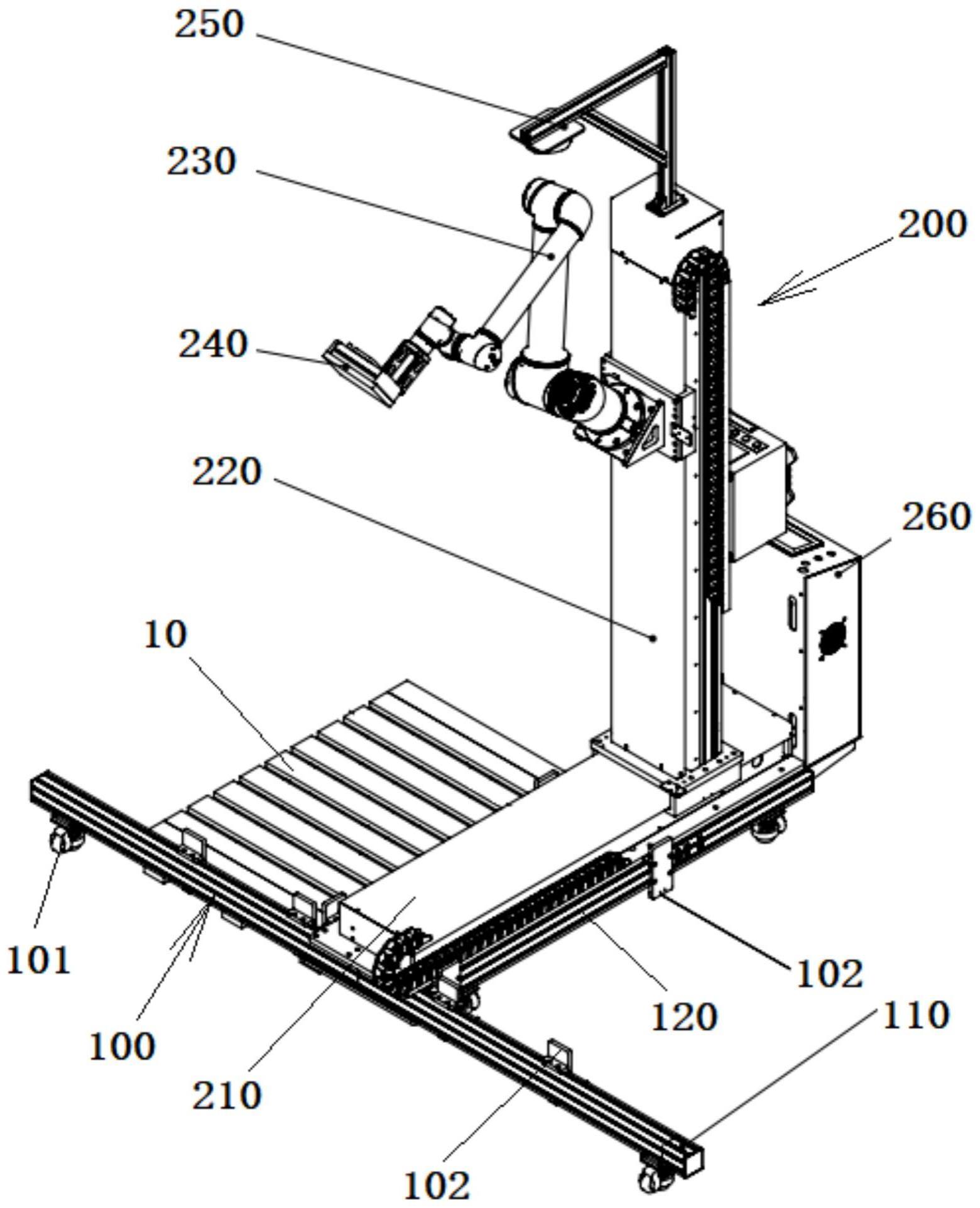
3、根据本发明的第一方面,本发明提供一种可移动式的智能码垛设备,包括底座以及设置在底座上的码垛机器人,所述底座的底部设置有多个滚轮;所述底座包括沿横向延伸的横杆以及沿纵向延伸的纵杆,所述横杆和纵杆上均设置有若干用于检测栈板的检测传感器。
4、优选的,所述码垛机器人包括纵向移动组件、竖向移动组件、多轴机械臂和夹具,所述纵向移动组件固定在底座上,所述竖向移动组件与纵向移动组件相连,所述多轴机械臂与竖向移动组件相连,所述夹具与多轴机械臂相连;所述纵向移动组件用于驱使竖向移动组件沿纵向移动,所述竖向移动组件用于驱使多轴机械臂沿竖直方向移动。
5、优选的,所述纵向移动组件包括座体、纵向移动机构、第一滑块和第一连接件,所述座体内设置有第一移动腔,且座体的表面设置有与第一移动腔连通并沿纵向延伸的第一开口;所述纵向移动机构和第一滑块均设置在第一移动腔中,所述第一滑块与座体沿纵向滑动连接,所述纵向移动机构与第一滑块相连并用于驱使第一滑块沿纵向移动;所述第一连接件的一端与第一滑块相连,另一端伸出第一开口并与竖向移动组件相连。
6、优选的,所述座体包括下座体和上盖体,所述上盖体包括上顶板和上侧板,所述上侧板位于上顶板的底部并与上顶板相连,所述上顶板位于下座体的上方,所述上侧板位于下座体的一侧,所述上侧板和下座体之间形成所述第一开口。
7、优选的,所述竖向移动组件包括移动座、竖向移动机构、第二滑块和第二连接件,所述移动座与纵向移动组件相连,所述移动座内设置有第二移动腔,且移动座的表面设置有与第二移动腔连通并沿竖直方向延伸的第二开口;所述竖向移动机构和第二滑块均设置在第二移动腔中,所述第二滑块与移动座沿竖直方向滑动连接,所述竖向移动机构与第二滑块相连并用于驱使第二滑块沿竖直方向移动;所述第二连接件的一端与第二滑块相连,另一端伸出第二开口并与多轴机械臂相连。
8、优选的,所述底座上还固定有电控箱,所述检测传感器和码垛机器人均与电控箱相连,当横杆上的检测传感器和纵杆上的检测传感器均检测到栈板时,所述电控箱控制码垛机器人开始工作。
9、优选的,所述码垛机器人上设置有摄像模块,所述摄像模块与电控箱相连,所述摄像模块用于拍摄码垛机器人周围的环境图像,所述电控箱用于识别环境图像中的人,并计算人到码垛机器人的距离,当人到码垛机器人的距离小于预设距离,所述电控箱用于控制码垛机器人停止工作。
10、优选的,所述纵杆与横杆的中部相连,所述纵杆的两侧分别具有一个码垛区域,所述纵杆和横杆上均设置有分别用于检测两个码垛区域是否有栈板的检测传感器。
11、优选的,所述滚轮为福马轮。
12、根据本发明的第二方面,本发明提供一种使用上述第一方面任一项所述的可移动式的智能码垛设备的码垛方法,包括如下步骤:
13、(1)工作人员将可移动式的智能码垛设备移动到码垛区域,并使底座保持在码垛区域;
14、(2)工作人员将栈板放入码垛区域并与底座准确对位,退出码垛区域,再启动可移动式的智能码垛设备;
15、(3)产品输送设备向可移动式的智能码垛设备输送产品;
16、(4)当产品移动到产品输送设备的末端时,码垛机器人抓取产品并将产品逐层码垛到栈板上;
17、(5)码垛机器人重复步骤(4)的操作,直至产品码垛完成。
18、本发明至少具有如下有益效果:本发明的可移动式的智能码垛设备的底座设置有多个滚轮,使得整个可移动式的智能码垛设备可以自由移动到任意码垛区域;同时,底座包括沿横向延伸的横杆以及沿纵向延伸的纵杆,横杆和纵杆上均设置有若干用于检测栈板的检测传感器,通过检测传感器可以定位到栈板,保障码垛机器人可以准确将产品码垛在栈板上;因此,本发明的可移动式的智能码垛设备可以灵活配置,适用于不同的码垛区域,其适用性更强。
技术特征:
1.一种可移动式的智能码垛设备,其特征在于:包括底座以及设置在底座上的码垛机器人,所述底座的底部设置有多个滚轮;所述底座包括沿横向延伸的横杆以及沿纵向延伸的纵杆,所述横杆和纵杆上均设置有若干用于检测栈板的检测传感器。
2.根据权利要求1所述的可移动式的智能码垛设备,其特征在于:所述码垛机器人包括纵向移动组件、竖向移动组件、多轴机械臂和夹具,所述纵向移动组件固定在底座上,所述竖向移动组件与纵向移动组件相连,所述多轴机械臂与竖向移动组件相连,所述夹具与多轴机械臂相连;所述纵向移动组件用于驱使竖向移动组件沿纵向移动,所述竖向移动组件用于驱使多轴机械臂沿竖直方向移动。
3.根据权利要求2所述的可移动式的智能码垛设备,其特征在于:所述纵向移动组件包括座体、纵向移动机构、第一滑块和第一连接件,所述座体内设置有第一移动腔,且座体的表面设置有与第一移动腔连通并沿纵向延伸的第一开口;所述纵向移动机构和第一滑块均设置在第一移动腔中,所述第一滑块与座体沿纵向滑动连接,所述纵向移动机构与第一滑块相连并用于驱使第一滑块沿纵向移动;所述第一连接件的一端与第一滑块相连,另一端伸出第一开口并与竖向移动组件相连。
4.根据权利要求3所述的可移动式的智能码垛设备,其特征在于:所述座体包括下座体和上盖体,所述上盖体包括上顶板和上侧板,所述上侧板位于上顶板的底部并与上顶板相连,所述上顶板位于下座体的上方,所述上侧板位于下座体的一侧,所述上侧板和下座体之间形成所述第一开口。
5.根据权利要求2所述的可移动式的智能码垛设备,其特征在于:所述竖向移动组件包括移动座、竖向移动机构、第二滑块和第二连接件,所述移动座与纵向移动组件相连,所述移动座内设置有第二移动腔,且移动座的表面设置有与第二移动腔连通并沿竖直方向延伸的第二开口;所述竖向移动机构和第二滑块均设置在第二移动腔中,所述第二滑块与移动座沿竖直方向滑动连接,所述竖向移动机构与第二滑块相连并用于驱使第二滑块沿竖直方向移动;所述第二连接件的一端与第二滑块相连,另一端伸出第二开口并与多轴机械臂相连。
6.根据权利要求1-5任一项所述的可移动式的智能码垛设备,其特征在于:所述底座上还固定有电控箱,所述检测传感器和码垛机器人均与电控箱相连,当横杆上的检测传感器和纵杆上的检测传感器均检测到栈板时,所述电控箱控制码垛机器人开始工作。
7.根据权利要求6所述的可移动式的智能码垛设备,其特征在于:所述码垛机器人上设置有摄像模块,所述摄像模块与电控箱相连,所述摄像模块用于拍摄码垛机器人周围的环境图像,所述电控箱用于识别环境图像中的人,并计算人到码垛机器人的距离,当人到码垛机器人的距离小于预设距离,所述电控箱用于控制码垛机器人停止工作。
8.根据权利要求1-5任一项所述的可移动式的智能码垛设备,其特征在于:所述纵杆与横杆的中部相连,所述纵杆的两侧分别具有一个码垛区域,所述纵杆和横杆上均设置有分别用于检测两个码垛区域是否有栈板的检测传感器。
9.根据权利要求1-5任一项所述的可移动式的智能码垛设备,其特征在于:所述滚轮为福马轮。
10.一种使用如权利要求1-9任一项所述的可移动式的智能码垛设备的码垛方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种可移动式的智能码垛设备和码垛方法。其中,该可移动式的智能码垛设备包括底座以及设置在底座上的码垛机器人,所述底座的底部设置有多个滚轮;所述底座包括沿横向延伸的横杆以及沿纵向延伸的纵杆,所述横杆和纵杆上均设置有若干用于检测栈板的检测传感器。本发明可以整体移动,灵活布置,适用性更强。
技术研发人员:宋仲康,王深,宋健,朱影,钟俊杰,李龙亮,邓艳夏,林澍钿,钟启帆
受保护的技术使用者:上海遨博智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!