基于底部转运机器人驱动的仓储货架与货架转运方法
本发明属于货架领域。
背景技术:
1、货架机器人在智能仓储中已经得到了广泛的应用,其原理是圆盘状的行走机器人行走至货架的底部,然后圆盘机器人做一个抬升动作,从而使货架离地,随后跟随圆盘状机器人一条行走,这种货架转运机器人在转运货架时,圆盘机器人的负载会始终随着货架的总重量的变化而跟着变大,当被转运的货架总质量过大时,该转运机器人的可能因重力负载过大而损坏。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本发明提供一种基于底部转运机器人驱动的仓储货架与货架转运方法,能有效提高转运过程中的稳定性的同时降低转运机器人的负载。
2、技术方案:为实现上述目的,本发明的基于底部转运机器人驱动的仓储货架,包括货架本体,货架本体的底层置物板下方通过连接柱固定有承托板;承托板下方有底框架,底框架下侧的顶角处均固定连接有向下延伸的球铰支柱;底框架上侧的顶角处均固定有向上延伸的导柱,各导柱穿过承托板上的导孔,各导柱上均套有a弹簧,各a弹簧均对承托板形成向上的托起力。
3、进一步的,各球铰支柱下端设置有球铰。
4、进一步的,四条球铰支柱中,相对位置的两条球铰支柱外分别同轴心活动套有第一升降套和第二升降套;第一升降套和第二升降套的下侧分别沿轮廓固定有第一摩擦环盘和第二摩擦环盘。
5、进一步的,底框架下方有中心盘,中心盘上方有固定于承托板底部的弹簧座,弹簧座与中心盘之间通过b弹簧连接;中心盘的两侧沿径向方向对称连接有第一横臂和第二横臂;第一横臂和第二横臂的末端分别通过斜向下延伸的第一斜臂和斜向下延伸的第二斜臂与第一升降套和第二升降套固定连接。
6、进一步的,当货架本体没有放置任何货物的情况下,若干a弹簧向上托起承托板,各导柱上端与底层置物板下端面之间形成间距,b弹簧对中心盘形成向上的拉力,使第一摩擦环盘和第二摩擦环盘在b弹簧的上拉下刚好脱离地面;四个球铰支柱承担货架本体全部重力。
7、进一步的,设定一个临界货物质量m;
8、当货架本体上放置了货物,当货物总质量小于m时,承托板在货物重力作用下相对下移,各a弹簧被进一步的向下压缩,各导柱上端与底层置物板下端面之间距离缩小,但仍然保持间距,与此同时弹簧座跟着下降一段距离,从而使原来拉伸状态的b弹簧被向下压缩一段,使第一摩擦环盘和第二摩擦环盘接触地面,且与地面形成一定压力,在货架本体上的货物总质量超过零但小于m的范围内,货架本体上的货物总质量越大,第一摩擦环盘和第二摩擦环盘与地面之间的压力越大。
9、进一步的,第一斜臂下侧沿长度方向设置有第一滚槽,第一滚槽在第一斜臂与第一横臂的连接处设置有a滚入口;第二斜臂下侧沿长度方向设置有第二滚槽,第二滚槽在第二斜臂与第二横臂的连接处设置有b滚入口;
10、还包括圆盘状行走机器车,圆盘状行走机器车的顶部固定安装有沿径向方向延伸的第一水平伸缩器和第二水平伸缩器,第一水平伸缩器与第二水平伸缩器相对于圆盘状行走机器人的轴线呈中心对称;第一水平伸缩器的a伸缩杆末端通过a滚轮支架安装有a滚轮,第二水平伸缩器的b伸缩杆末端通过b滚轮支架安装有b滚轮;第一水平伸缩器和第二水平伸缩器分别平行于第一横臂和第二横臂下方时,a滚轮和b滚轮分别对应a滚入口和b滚入口。
11、进一步的,当货架本体上的货物总质量等于或超过m时,承托板在货物重力作用下进一步相对下移,各a弹簧进一步的被压缩,各导柱上端与底层置物板下端面限位接触,使承托板和底层置物板无法进一步下降,与此同时原来没有货物时的拉伸状态的b弹簧变为呈压缩状。
12、进一步的,基于底部转运机器人驱动的仓储货架的货架转运方法:圆盘状行走机器车先行走至同轴心于中心盘下方,然后通过原地打转,使第一水平伸缩器与第二水平伸缩器分别平行于第一横臂和第二横臂下方,使a滚轮和b滚轮分别对应a滚入口和b滚入口;随后a伸缩杆和b伸缩杆同步向外伸出,使a滚轮和b滚轮分别滚卡入a滚入口和b滚入口中,随着a伸缩杆和b伸缩杆继续同步伸出,a滚轮和b滚轮分别滚入第一滚槽和第二滚槽中,圆盘状行走机器车与货架本体同步,圆盘状行走机器车带着货架本体同步在水平地面行走位移到指定位置,进而实现货架的转运。
13、技术效果:本发明的货架本体在没有放货物时,下端与地面为纯滚动配合,能很轻易的被人推动,从而方便工作人员对无货物的货架的布置和转移;
14、货架本体在有放货物时,第一摩擦环盘和第二摩擦环盘与地面之间形成的最大静摩擦力会对抗货架本体受到的水平推力,从而使货架本体无法被轻易的推动,保证了已经放置货物的货架本体的稳定性;
15、当货架本体上的货物等于或超过m后,货架本体上的货物的继续增加并不会增大圆盘状行走机器车的负载,从而保证货架本体不会被负载过大而损坏。
技术特征:
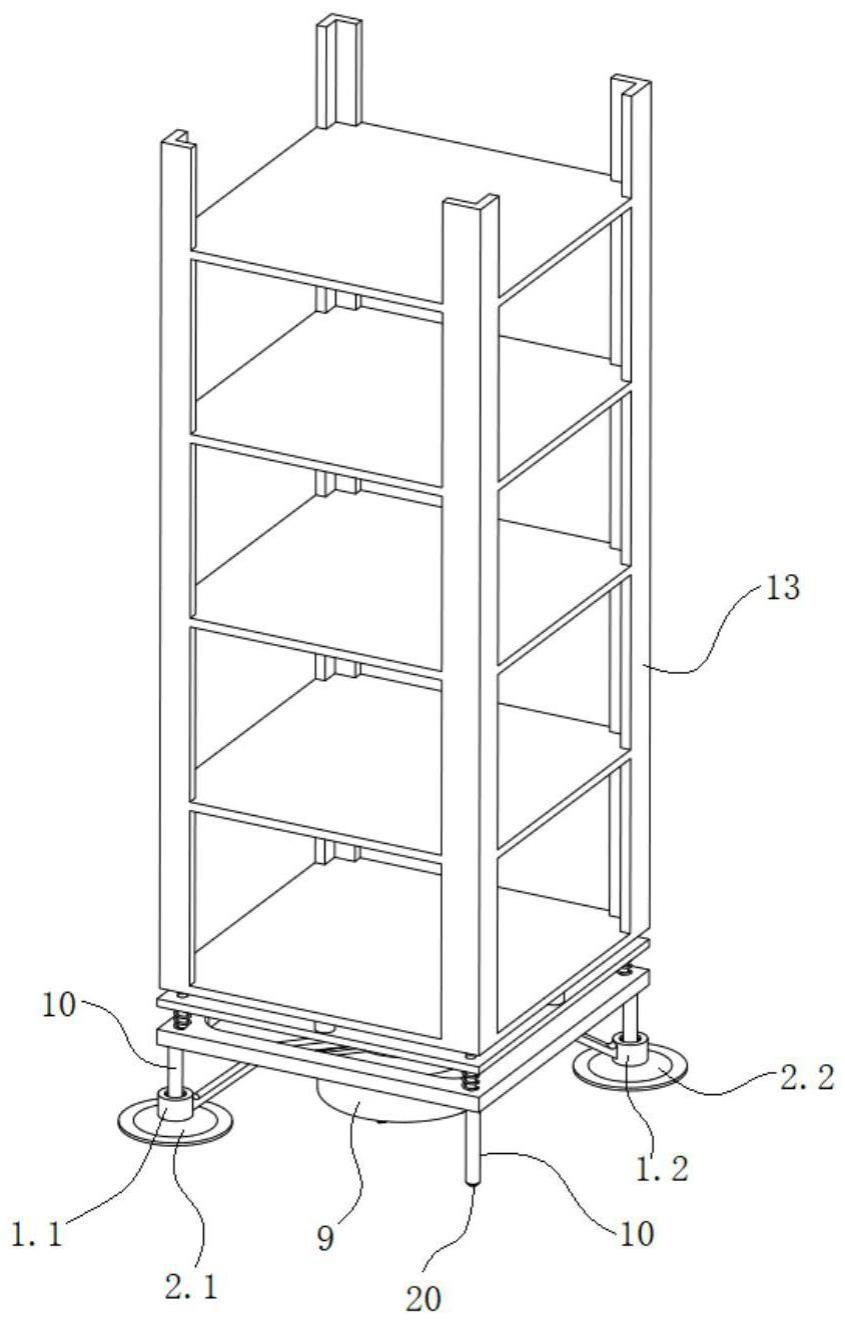
1.基于底部转运机器人驱动的仓储货架,其特征在于:包括货架本体(13),所述货架本体(13)的底层置物板(14)下方通过连接柱(27)固定有承托板(16);所述承托板(16)下方有底框架(25),所述底框架(25)下侧的顶角处均连接有向下延伸的球铰支柱(10);底框架(25)上侧的顶角处均有向上延伸的导柱(12),各导柱(12)穿过承托板(16)上的导孔(11),各导柱(12)上均套有a弹簧(28),各a弹簧(28)均对承托板(16)形成向上的托起力。
2.根据权利要求1所述的基于底部转运机器人驱动的仓储货架,其特征在于:各球铰支柱(10)下端设置有球铰(20)。
3.根据权利要求2所述的基于底部转运机器人驱动的仓储货架,其特征在于:四条所述球铰支柱(10)中,相对位置的两条球铰支柱(10)外分别同轴心活动套有第一升降套(1.1)和第二升降套(1.2);所述第一升降套(1.1)和第二升降套(1.2)的下侧分别沿轮廓固定有第一摩擦环盘(2.1)和第二摩擦环盘(2.2)。
4.根据权利要求2所述的基于底部转运机器人驱动的仓储货架,其特征在于:所述底框架(25)下方有中心盘(18),所述中心盘(18)上方有固定于承托板(16)底部的弹簧座(15),所述弹簧座(15)与中心盘(18)之间通过b弹簧(17)连接;所述中心盘(18)的两侧沿径向方向对称连接有第一横臂(4.1)和第二横臂(4.2);所述第一横臂(4.1)和第二横臂(4.2)的末端分别通过斜向下延伸的第一斜臂(3.1)和斜向下延伸的第二斜臂(3.2)与第一升降套(1.1)和第二升降套(1.2)固定连接。
5.根据权利要求4所述的基于底部转运机器人驱动的仓储货架,其特征在于:当货架本体(13)没有放置任何货物的情况下,若干a弹簧(28)向上托起承托板(16),各导柱(12)上端与底层置物板(14)下端面之间形成间距,b弹簧(17)对中心盘(18)形成向上的拉力,使第一摩擦环盘(2.1)和第二摩擦环盘(2.2)在b弹簧(17)的上拉下刚好脱离地面;四个球铰支柱(10)承担货架本体(13)全部重力。
6.根据权利要求4所述的基于底部转运机器人驱动的仓储货架,其特征在于:设定一个临界货物质量m;
7.根据权利要求6所述的基于底部转运机器人驱动的仓储货架,其特征在于:所述第一斜臂(3.1)下侧沿长度方向设置有第一滚槽(31.1),第一滚槽(31.1)在第一斜臂(3.1)与第一横臂(4.1)的连接处设置有a滚入口(30.1);所述第二斜臂(3.2)下侧沿长度方向设置有第二滚槽(31.2),第二滚槽(31.2)在第二斜臂(3.2)与第二横臂(4.2)的连接处设置有b滚入口(30.2);
8.根据权利要求7所述的基于底部转运机器人驱动的仓储货架,其特征在于:当货架本体(13)上的货物总质量等于或超过m时,承托板(16)在货物重力作用下进一步相对下移,各a弹簧(28)进一步的被压缩,各导柱(12)上端与底层置物板(14)下端面限位接触,使承托板(16)和底层置物板(14)无法进一步下降,与此同时原来没有货物时的拉伸状态的b弹簧(17)变为呈压缩状。
9.根据权利要求8所述的基于底部转运机器人驱动的仓储货架的货架转运方法,其特征在于:圆盘状行走机器车(9)先行走至同轴心于中心盘(18)下方,然后通过原地打转,使第一水平伸缩器(7.1)与第二水平伸缩器(7.2)分别平行于第一横臂(4.1)和第二横臂(4.2)下方,使a滚轮(5.1)和b滚轮(5.2)分别对应a滚入口(30.1)和b滚入口(30.2);随后a伸缩杆(6.1)和b伸缩杆(6.2)同步向外伸出,使a滚轮(5.1)和b滚轮(5.2)分别滚卡入a滚入口(30.1)和b滚入口(30.2)中,随着a伸缩杆(6.1)和b伸缩杆(6.2)继续同步伸出,a滚轮(5.1)和b滚轮(5.2)分别滚入第一滚槽(31.1)和第二滚槽(31.2)中,圆盘状行走机器车(9)与货架本体(13)同步,圆盘状行走机器车(9)带着货架本体(13)同步在水平地面行走位移到指定位置,进而实现货架的转运。
技术总结
本发明公开了一种基于底部转运机器人驱动的仓储货架,包括货架本体,货架本体的底层置物板下方通过连接柱固定有承托板;承托板下方有底框架,底框架下侧的顶角处均固定连接有向下延伸的球铰支柱;底框架上侧的顶角处均固定有向上延伸的导柱,各导柱穿过承托板上的导孔,各导柱上均套有a弹簧,各a弹簧均对承托板形成向上的托起力;能有效提高转运过程中的稳定性的同时降低转运机器人的负载。
技术研发人员:王沁,吴松
受保护的技术使用者:西安工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!