一种大平衡重式叉车的整车传感器布置方法与流程
本发明涉及叉车,具体一种大平衡重式叉车的整车传感器布置方法。
背景技术:
1、随着社会的发展和工业化进程的加速,叉车在物流、制造、建筑等行业中的应用越来越广泛。但在实际操作中,叉车存在一些安全隐患和效率问题。为了解决这些问题,人们开始研究如何使用传感器技术,并将其应用于叉车中,以提高叉车的安全性和效率。
2、在传感器应用于叉车领域时,由于感应器的种类众多,如何将他们分别布置在叉车上的最佳位置,提高安全性和检测效率,成为重中之重,因此亟需设计一种大平衡重式叉车的整车传感器布置方法来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种大平衡重式叉车的整车传感器布置方法,以解决上述背景技术中提出的现有的感应器排布利用率低,安全性和检测效率不高的问题。
2、为实现上述目的,本发明提供如下技术方案:一种大平衡重式叉车的整车传感器布置方法,包括:
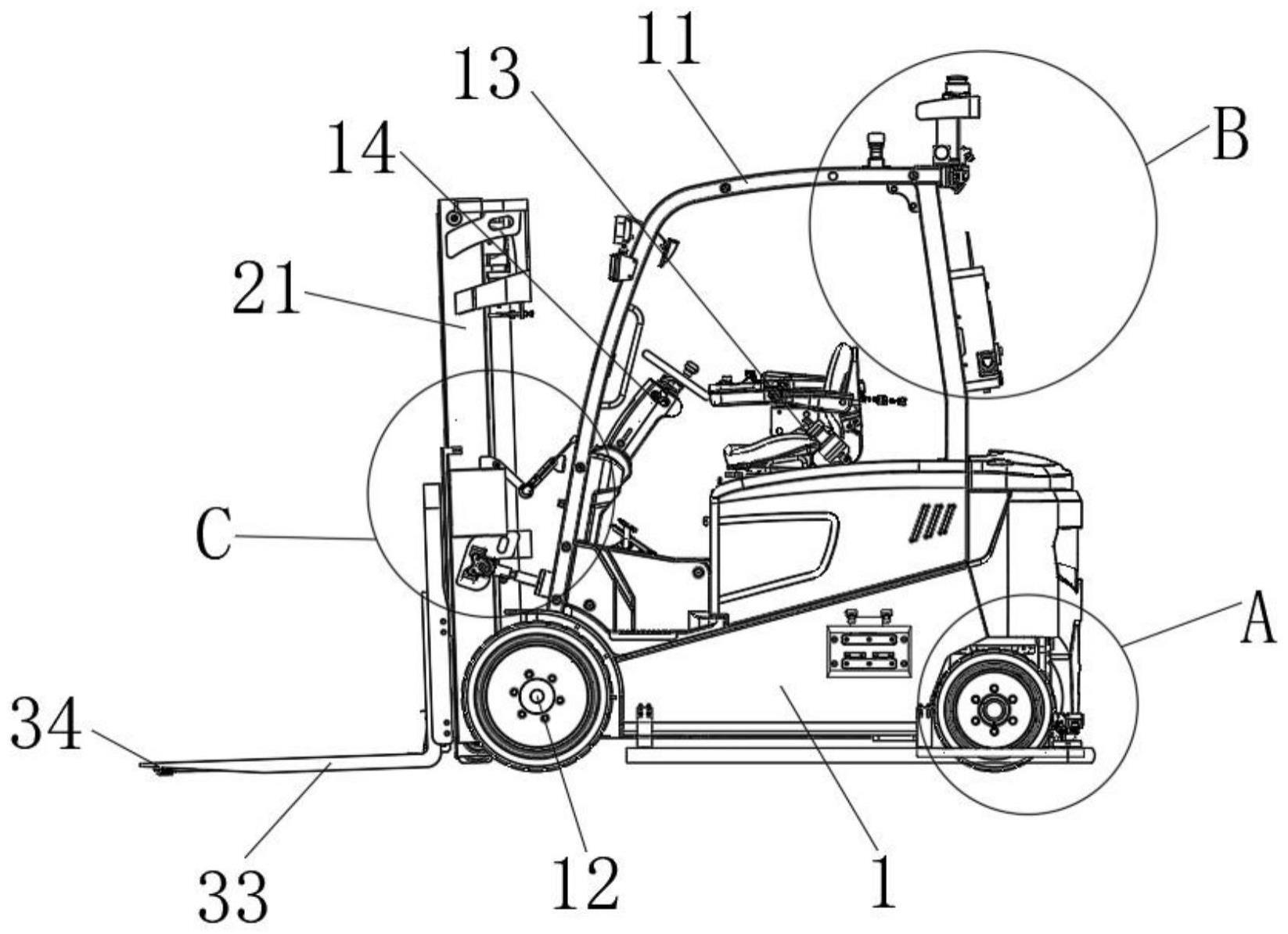
3、主体,包括叉车本体,所述叉车本体的上表面固定连接有防护架,所述叉车本体的底部设置有车轮,所述叉车本体的表面上固定连接有座位,所述叉车本体的表面上固定连接有操作室,所述防护架的表面上固定连接有急停开关,所述叉车本体和防护架的表面上设置有传感器布置方案,所述传感器布置方案包括环境感知传感器布置方案、自身感知传感器布置方案和安全防护传感器布置方案。
4、优选的,所述自身感知传感器布置方案包括调节气缸,所述调节气缸固定连接在连接在叉车本体的表面上,所述调节气缸的表面上设置有输出轴,所述调节气缸的输出轴上转动连接有门架,所述门架和防护架之间设置有拉线编码器,所述门架表面上固定连接有倾角传感器,所述叉车本体的底部设置有驱动电机,所述驱动电机的表面上设置有输出轴,所述驱动电机的输出轴上固定连接车轮,所述驱动电机通过输出轴驱动车轮旋转,所述叉车本体的底部设置有转向编码器。
5、优选的,所述安全防护传感器布置方案包括立体避障相机,所述立体避障相机固定连接在防护架的顶部,所述叉车本体的底部固定连接有安全触边,所述安全触边的表面上固定连接有第一激光避障雷达,所述门架的表面上滑动连接有叉臂,所述叉臂的底部固定连接有牙尖光电,所述叉车本体的底部固定连接有第二激光避障雷达,所述叉车本体的底部固定连接有牙根接近开关。
6、优选的,所述环境感知传感器布置方案设置在防护架上,所述环境感知传感器布置方案包括第三激光避障雷达,所述第三激光避障雷达固定连接在防护架的表面上。
7、优选的,所述门架底部在叉车本体的底部转动,所述调节气缸驱动输出轴伸缩移动,所述调节气缸的输出轴在伸缩的过程中促使门架在调节气缸的输出轴上转动,所述门架在调节气缸输出轴上旋转的角度大于门架在叉车本体底部旋转的角度。
8、优选的,所述倾角传感器跟随门架的角度变化而变化,所述倾角传感器能够检测出门架的旋转角度,所述拉线编码器在叉车本体和门架之间,所述拉线编码器能够跟随门架的移动改变形状。
9、优选的,驱动电机的内部内置编码器,所述驱动电机能够检测处车轮的实际转速,所述叉车本体的尾部为舵轮,所述舵轮的工作端连接转向编码器,所述转向编码器能够检测舵轮转角的大小和方向。
10、优选的,所述安全触边作用在叉车本体车头方向,所述第一激光避障雷达作用在叉车本体的车头及两侧方向,所述立体避障相机作用在叉车本体的车头方向,所述安全触边为被动式,所述第一激光避障雷达和调节气缸为主动式防护。
11、优选的,所述牙尖光电作用在叉臂的前方,所述第二激光避障雷达作用在叉车本体后方,所述牙根接近开关作用在叉臂的前方,所述牙根接近开关用于对障碍物进行检测,所述第二激光避障雷达为主动式防护。
12、优选的,所述第三激光避障雷达在叉车本体的最高点,所述第三激光避障雷达能够监测叉车本体在整个调度空间的相对位置。
13、与现有技术相比,本发明的有益效果是:
14、1、该大平衡重式叉车的整车传感器布置方案,通过环境感知传感器布置方案、自身感知传感器布置方案和安全防护传感器布置方案,使得传感器对叉车的自身,和周边环境进行了全方位的布置,并且能够对叉车进行一个及时的防护效果,降低了叉车在使用过程中的事故率,提高了叉车使用的安全性,和感应器的使用效果。
15、2、大平衡重式叉车的整车传感器布置方案,通过将第三激光避障雷达放置在防护架的顶部,用于实时监测无人叉车在整个调度空间的相对位置,将拉线编码器安装在门架和叉车本体之间,并将拉线编码器和叉臂通过线束相连检测叉臂的升降,将倾角传感器固定在门架上,检测门架的倾斜角度,其驱动电机内置编码器测量车轮的角度和方向,并通过转向编码器进行车轮的转速测量,其牙尖光电设置在叉臂的前端,能够对叉臂前方进行避障,牙根接近开关在叉车本体的底部用于叉臂前方障碍物检测,第二激光避障雷达在叉车本体底部为叉车本体的后方进行防护,立体避障相机也在防护架的顶部,用于车头前方的立体防护,完成了对叉车本体的全面感应,避免了感应布置的盲区,提高了结构的合理性。
技术特征:
1.一种大平衡重式叉车的整车传感器布置方法,其特征在于,包括:
2.根据权利要求1所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:所述自身感知传感器布置方案包括调节气缸(2),所述调节气缸(2)固定连接在连接在叉车本体(1)的表面上,所述调节气缸(2)的表面上设置有输出轴,所述调节气缸(2)的输出轴上转动连接有门架(21),所述门架(21)和防护架(11)之间设置有拉线编码器(22),所述门架(21)表面上固定连接有倾角传感器(23),所述叉车本体(1)的底部设置有驱动电机(24),所述驱动电机(24)的表面上设置有输出轴,所述驱动电机(24)的输出轴上固定连接车轮(12),所述驱动电机(24)通过输出轴驱动车轮(12)旋转,所述叉车本体(1)的底部设置有转向编码器(25)。
3.根据权利要求2所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:所述安全防护传感器布置方案包括立体避障相机(3),所述立体避障相机(3)固定连接在防护架(11)的顶部,所述叉车本体(1)的底部固定连接有安全触边(31),所述安全触边(31)的表面上固定连接有第一激光避障雷达(32),所述门架(21)的表面上滑动连接有叉臂(33),所述叉臂(33)的底部固定连接有牙尖光电(34),所述叉车本体(1)的底部固定连接有第二激光避障雷达(35),所述叉车本体(1)的底部固定连接有牙根接近开关(36)。
4.根据权利要求1所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:所述环境感知传感器布置方案设置在防护架(11)上,所述环境感知传感器布置方案包括第三激光避障雷达(4),所述第三激光避障雷达(4)固定连接在防护架(11)的表面上。
5.根据权利要求2所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:所述门架(21)底部在叉车本体(1)的底部转动,所述调节气缸(2)驱动输出轴伸缩移动,所述调节气缸(2)的输出轴在伸缩的过程中促使门架(21)在调节气缸(2)的输出轴上转动,所述门架(21)在调节气缸(2)输出轴上旋转的角度大于门架(21)在叉车本体(1)底部旋转的角度。
6.根据权利要求2所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:所述倾角传感器(23)跟随门架(21)的角度变化而变化,所述倾角传感器(23)能够检测出门架(21)的旋转角度,所述拉线编码器(22)在叉车本体(1)和门架(21)之间,所述拉线编码器(22)能够跟随门架(21)的移动改变形状。
7.根据权利要求3所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:驱动电机(24)的内部内置编码器,所述驱动电机(24)能够检测处车轮(12)的实际转速,所述叉车本体(1)的尾部为舵轮,所述舵轮的工作端连接转向编码器(25),所述转向编码器(25)能够检测舵轮转角的大小和方向。
8.根据权利要求3所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:所述安全触边(31)作用在叉车本体(1)车头方向,所述第一激光避障雷达(32)作用在叉车本体(1)的车头及两侧方向,所述立体避障相机(3)作用在叉车本体(1)的车头方向,所述安全触边(31)为被动式,所述第一激光避障雷达(32)和调节气缸(2)为主动式防护。
9.根据权利要求3所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:所述牙尖光电(34)作用在叉臂(33)的前方,所述第二激光避障雷达(35)作用在叉车本体(1)后方,所述牙根接近开关(36)作用在叉臂(33)的前方,所述牙根接近开关(36)用于对障碍物进行检测,所述第二激光避障雷达(35)为主动式防护。
10.根据权利要求4所述的一种大平衡重式叉车的整车传感器布置方法,其特征在于:所述第三激光避障雷达(4)在叉车本体(1)的最高点,所述第三激光避障雷达(4)能够监测叉车本体(1)在整个调度空间的相对位置。
技术总结
本发明涉及叉车技术领域,具体一种大平衡重式叉车的整车传感器布置方法,包括:主体,包括叉车本体,所述叉车本体的上表面固定连接有防护架,所述叉车本体的底部设置有车轮,所述叉车本体的表面上固定连接有座位,所述叉车本体的表面上固定连接有操作室,所述防护架的表面上固定连接有急停开关,所述叉车本体和防护架的表面上设置有传感器布置方案。本发明通过环境感知传感器布置方案、自身感知传感器布置方案和安全防护传感器布置方案,使得传感器对叉车的自身,和周边环境进行了全方位的布置,并且能够对叉车进行一个及时的防护效果,降低了叉车在使用过程中的事故率,提高了叉车使用的安全性,和感应器的使用效果。
技术研发人员:陈文成,吕朝顺,苏伟鹏
受保护的技术使用者:劢微机器人科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!