一种物料转运用机械臂头端夹爪的制作方法
本发明涉及物料转运,尤其涉及一种物料转运用机械臂头端夹爪。
背景技术:
1、机械臂头端夹爪是一种常见的物料转运工具,它通常由机械臂、控制器和夹爪组成。在使用时,机械臂会通过控制器控制夹爪打开或关闭,从而实现对物料的抓取、放置、移动等操作。
2、现有的机械臂头端夹爪在对物料进行抓取转运时,依然采用简单的夹爪对物料进行夹取后进行转运,在转运过程中,常常出现夹爪上夹取的物料从夹爪之间滑落,导致需要多次进行夹取转运和滑落后物料易受损,影响对物料转运的效果,所以需要一种物料转运用机械臂头端夹爪。
技术实现思路
1、基于现有的机械臂头端夹爪在对物料进行抓取转运时,采用简单的夹爪对物料进行夹取后进行转运,在转运过程中,常常出现夹爪上夹取的物料从夹爪之间滑落,导致需要多次进行夹取转运和滑落后物料易受损,影响对物料转运的效果的技术问题,本发明提出了一种物料转运用机械臂头端夹爪。
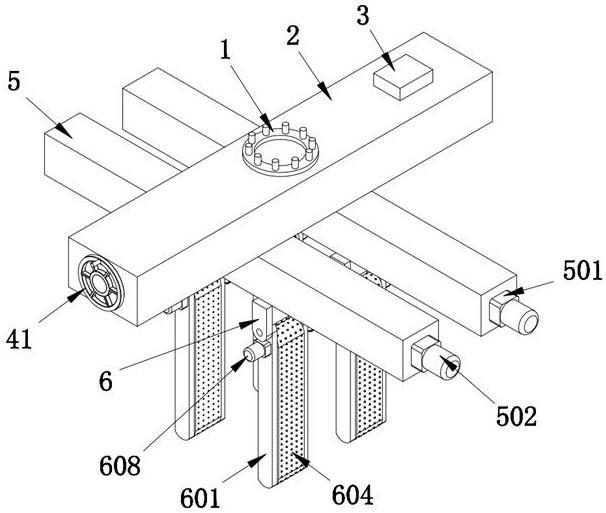
2、本发明提出的一种物料转运用机械臂头端夹爪,包括用于与机械臂连接固定的连接环,所述连接环的下表面固定连接有内壁呈矩形状的固定框,所述固定框的上表面固定安装有用于控制夹爪工作的控制器,所述固定框的内壁设置有用于调节夹爪抓取间距的间距调节机构,所述间距调节机构的下方设置有用于对物料进行抓取的驱动机构,所述驱动机构的下方设置有用于对物料转运的抓取机构。
3、其中,间距调节机构用于对不同物料进行转运抓取时,抓取机构之间的距离进行调节。
4、其中,驱动机构用于对物料转运抓取时,对抓取机构提供抓取驱动。
5、其中,抓取机构用于对物料转运进行抓取。
6、优选地,所述间距调节机构包括用于间距调节驱动的间距调节驱动螺杆,所述间距调节驱动螺杆的两端均通过轴承与所述固定框的内壁转动连接。
7、所述间距调节驱动螺杆的一端固定连接有与所述固定框的表面滑动连接的调节手轮。
8、优选地,所述间距调节驱动螺杆的表面分别开设有以所述间距调节驱动螺杆的轴线为中心呈对称分布的左螺纹槽和右螺纹槽。
9、所述固定框的下表面开设有与所述固定框的内壁固定连通的调节行程槽,所述固定框的内壁滑动连接有两个以所述间距调节驱动螺杆的轴线为中心呈对称分布的调节滑块,两个所述调节滑块的表面分别与左螺纹槽和右螺纹槽的内壁螺纹连接。
10、所述调节滑块的表面呈凸形状,所述调节滑块的一端通过所述调节行程槽延伸至所述固定框的下表面。
11、优选地,所述驱动机构包括与所述调节滑块的表面固定连接的驱动框,两个所述驱动框的上表面均与所述固定框的下表面滑动连接。
12、优选地,所述驱动框的表面固定安装有减速机一,所述减速机一的表面固定安装有通过线缆与所述控制器电性连接的驱动电机,所述驱动电机的输出轴与所述减速机一的动力输入端固定连接。
13、优选地,所述驱动框的内壁通过轴承转动连接有抓取驱动螺杆,所述抓取驱动螺杆的一端与所述减速机一的动力输出端固定连接。
14、优选地,所述驱动框的下表面开设有与所述驱动框的内壁固定连通的驱动行程槽,所述驱动框的内壁滑动连接有呈工字形状的驱动滑块,所述驱动滑块的一端通过驱动行程槽延伸至驱动框的下表面。
15、优选地,所述抓取驱动螺杆的表面分别设置有正螺纹槽和反螺纹槽,两个所述驱动滑块的表面分别与所述正螺纹槽和反螺纹槽的内壁螺纹连接。
16、优选地,所述抓取机构包括与所述驱动滑块的表面固定连接有固定连接板,两个所述固定连接板以所述驱动滑块的轴线为中心呈对称分布。
17、所述固定连接板的一端通过轴承转动连接和销轴转动连接有抓取夹板,两个所述抓取夹板的表面通过轴承分别转动连接有主动辊和从动辊,所述主动辊和所述从动辊的表面通过抓取传送带传动连接,所述主动辊和所述从动辊之间设置有与所述抓取传送带的表面滑动连接的固定支撑板,所述固定支撑板的表面与所述抓取夹板的表面固定连接,所述抓取传送带的表面固定连接有多个呈均匀分布的橡胶防滑凸点。
18、优选地,所述抓取夹板的表面固定安装有减速机二,所述主动辊的一端与所述减速机二的动力输出端固定连接。
19、所述减速机二的表面固定安装有通过线缆与所述控制器电性连接的驱动马达,所述驱动马达的输出轴与所述减速机二的动力输入端固定连接。
20、所述主动辊的另一端延伸至所述抓取夹板的表面并固定套接有主动齿轮,所述固定连接板的表面固定连接有与所述主动齿轮的表面啮合的固定齿圈。
21、本发明中的有益效果为:
22、1、通过设置驱动机构和抓取机构,在对物料进行抓取转运时,通过驱动机构带动抓取机构打开或关闭,对物料进行抓取,在对物料进行抓取后,控制器自动控制抓取机构工作,通过驱动马达和减速机二带动抓取传送带转动,带动物料向上运动的同时,带动抓取夹板转动,使相对的两个夹板之间由平行夹持状态,变为倒八字状态,防止抓取转运的物料从夹爪之间滑落,从而解决了现有的机械臂头端夹爪在对物料进行抓取转运时,采用简单的夹爪对物料进行夹取后进行转运,在转运过程中,常常出现夹爪上夹取的物料从夹爪之间滑落,导致需要多次进行夹取转运和滑落后物料易受损,影响对物料转运的效果的问题。
23、2、通过设置间距调节机构,在对物料进行抓取转运时,便于通过调节手轮带动两个驱动框运动,调节两个驱动框之间的间距,适用不同的物料进行转运,从而达到更好的对物料进行抓取转运的效果。
技术特征:
1.一种物料转运用机械臂头端夹爪,包括用于与机械臂连接固定的连接环(1),其特征在于:所述连接环(1)的下表面固定连接有内壁呈矩形状的固定框(2),所述固定框(2)的上表面固定安装有用于控制夹爪工作的控制器(3),所述固定框(2)的内壁设置有用于调节夹爪抓取间距的间距调节机构,所述间距调节机构的下方设置有用于对物料进行抓取的驱动机构,所述驱动机构的下方设置有用于对物料转运的抓取机构;
2.根据权利要求1所述的一种物料转运用机械臂头端夹爪,其特征在于:所述间距调节机构包括用于间距调节驱动的间距调节驱动螺杆(4),所述间距调节驱动螺杆(4)的两端均通过轴承与所述固定框(2)的内壁转动连接;
3.根据权利要求2所述的一种物料转运用机械臂头端夹爪,其特征在于:所述间距调节驱动螺杆(4)的表面分别开设有以所述间距调节驱动螺杆(4)的轴线为中心呈对称分布的左螺纹槽(401)和右螺纹槽(402);
4.根据权利要求3所述的一种物料转运用机械臂头端夹爪,其特征在于:所述驱动机构包括与所述调节滑块(404)的表面固定连接的驱动框(5),两个所述驱动框(5)的上表面均与所述固定框(2)的下表面滑动连接。
5.根据权利要求4所述的一种物料转运用机械臂头端夹爪,其特征在于:所述驱动框(5)的表面固定安装有减速机一(501),所述减速机一(501)的表面固定安装有通过线缆与所述控制器(3)电性连接的驱动电机(502),所述驱动电机(502)的输出轴与所述减速机一(501)的动力输入端固定连接。
6.根据权利要求5所述的一种物料转运用机械臂头端夹爪,其特征在于:所述驱动框(5)的内壁通过轴承转动连接有抓取驱动螺杆(503),所述抓取驱动螺杆(503)的一端与所述减速机一(501)的动力输出端固定连接。
7.根据权利要求6所述的一种物料转运用机械臂头端夹爪,其特征在于:所述驱动框(5)的下表面开设有与所述驱动框(5)的内壁固定连通的驱动行程槽(504),所述驱动框(5)的内壁滑动连接有呈工字形状的驱动滑块(505),所述驱动滑块(505)的一端通过驱动行程槽(504)延伸至驱动框(5)的下表面。
8.根据权利要求7所述的一种物料转运用机械臂头端夹爪,其特征在于:所述抓取驱动螺杆(503)的表面分别设置有正螺纹槽(506)和反螺纹槽(507),两个所述驱动滑块(505)的表面分别与所述正螺纹槽(506)和反螺纹槽(507)的内壁螺纹连接。
9.根据权利要求8所述的一种物料转运用机械臂头端夹爪,其特征在于:所述抓取机构包括与所述驱动滑块(505)的表面固定连接有固定连接板(6),两个所述固定连接板(6)以所述驱动滑块(505)的轴线为中心呈对称分布;
10.根据权利要求9所述的一种物料转运用机械臂头端夹爪,其特征在于:所述抓取夹板(601)的表面固定安装有减速机二(607),所述主动辊(602)的一端与所述减速机二(607)的动力输出端固定连接;
技术总结
本发明属于物料转运技术领域,尤其是一种物料转运用机械臂头端夹爪,包括用于与机械臂连接固定的连接环,所述连接环的下表面固定连接有内壁呈矩形状的固定框。该物料转运用机械臂头端夹爪,通过设置驱动机构和抓取机构,在对物料进行抓取转运时,使相对的两个夹板之间由平行夹持状态,变为倒八字状态,防止抓取转运的物料从夹爪之间滑落,从而解决了现有的机械臂头端夹爪在对物料进行抓取转运时,采用简单的夹爪对物料进行夹取后进行转运,在转运过程中,常常出现夹爪上夹取的物料从夹爪之间滑落,导致需要多次进行夹取转运和滑落后物料易受损,影响对物料转运的效果的问题。
技术研发人员:唐崢嵘,黃军華,唐钰,唐純洁,杨惠花
受保护的技术使用者:东莞市力佳磁性材料有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!