自动化天车的马达控制架构的制作方法
本发明涉及一种天车的控制架构,尤其涉及自动化天车的马达控制架构。
背景技术:
1、固定式起重机俗称天车,现今工业装配运输或是港口货柜吊运都会利用悬梁式天车(bridge crane)或是龙门式天车(gantry crane),而根据技术发展趋势,这些天车的操作渐渐由技师的人工操作转变为半自动控制甚至是全自动控制。
2、在技术转变的情况下,过往由技师人工操作的解决方案要如何实现在自动化的天车控制上,即待本技术领域的人员加以克服。
3、例如,传统天车技师需要使用手动点动(manual inching)的方式让天车与吊挂货物同步运行至定位点,由此消除货物的摇摆,但此技术手段要如何在自动化天车上实现,即为难题。
4、再例如,为定位至指定位置,传统天车技师需将天车先移动到定位点附近,再使用手动点动的方式让天车缓慢移动至定位点,由此达到精准的定位。然而,此技术手段要如何在自动化天车上实现,同样为本领域的技术人员所需克服的课题。
5、又或者,传统龙门式天车因为长跨距的关系,两侧轮轴在移动时不同步,因此需要使用可挠性机构做基本的结构纠偏。然而,利用可挠性机构进行纠偏的方式容易造成天车震动,而有待更佳的解决方案。
6、有鉴于此,本发明提出一种自动化的天车的马达控制架构,可解决上述技术问题,并且同时适用于悬梁式天车以及龙门式天车。
技术实现思路
1、本发明的目的在于提供一种自动化天车的马达控制架构,可以在天车的自动化控制架构下提供防摇摆控制以及全闭环控制。
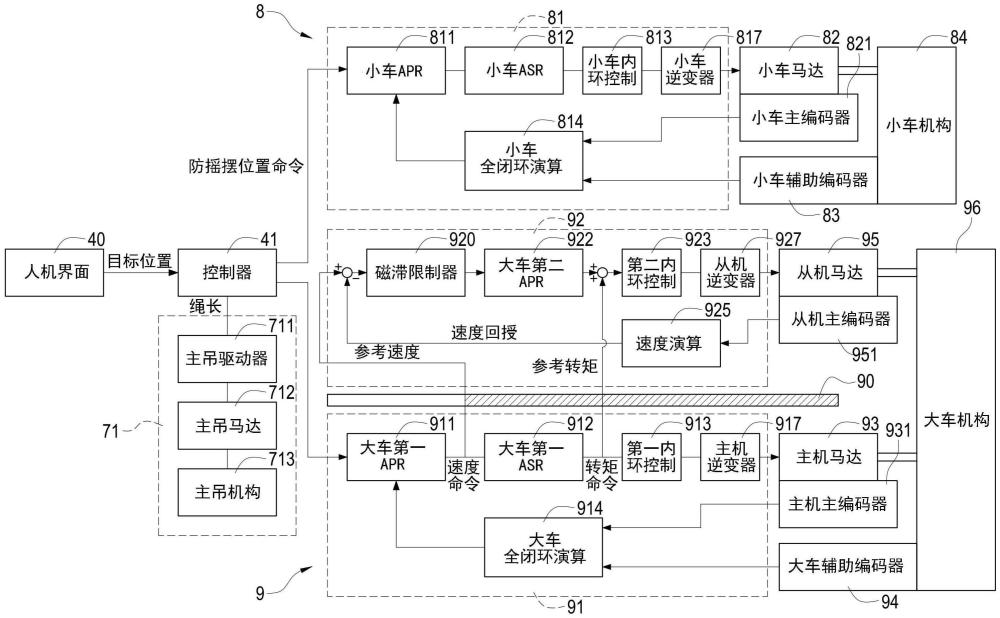
2、于一实施例中,本发明的自动化天车的马达控制架构包括:一大车,跨设于一主轨道上,具有分别驱动一主机马达及一从机马达的一主机驱动器及一从机驱动器,使该大车于该主轨道上沿x方向移动,其中该主机马达及该从机马达的轴上分别具有一主编码器,该主轨道上具有一辅助编码器;一小车,设置于该大车上的一小车轨道,具有驱动一小车马达的一小车驱动器,使该小车于该小车轨道上沿y方向移动;一主吊,设置于该小车一侧,具有一主吊驱动器驱动一主吊马达,使该主吊马达连动的一主吊机构上的一吊绳沿z方向进行升降,并持续计算该吊绳的一绳长信息;一人机界面(human machine interface,hmi),被配置来接受外部操作以输入一目标位置;及一控制器,连接该大车的该主机机驱动器及该从机驱动器、该小车驱动器、该主吊驱动器及该hmi,被配置来基于该目标位置进行路径规划以产生一位置命令,并且利用绳长信息结合该位置命令计算一防摇摆位置命令;其中,该大车的该主机驱动器及该从机驱动器被配置来分别基于该防摇摆位置命令以及该两个主编码器之一的位置回授及该辅助编码器的一辅助位置回授进行一全闭环演算;其中,该主机驱动器被配置来基于该全闭环演算后产生的一速度命令及一转矩命令控制该主机马达运转,并且该从机驱动器被配置来跟随该主机驱动器的该速度命令及该转矩命令控制该从机马达运转;或者,该主机驱动器及该从机驱动器被配置来分别将该两个主编码器之一及该辅助编码器的一位置误差做为一同动控制的来源以对该转矩命令进行补偿,并分别控制该主机马达及该从机马达依据补偿后的该转矩命令运转。
3、于另一实施例中,本发明的自动化天车的马达控制架构包括:一大车,跨设于一主轨道上,具有同时驱动一主机马达及一从机马达的一大车驱动器,使该大车于该主轨道上沿x方向移动,其中该主机马达的轴上具有一主编码器,该主轨道上具有一辅助编码器;一小车,设置于该大车上的一小车轨道,具有驱动一小车马达的一小车驱动器,使该小车于该小车轨道上沿y方向移动;一主吊,设置于该小车一侧,具有一主吊驱动器驱动一主吊马达,使该主吊马达连动的一主吊机构上的一吊绳沿z方向进行升降,并持续计算该吊绳的一绳长信息;一hmi,被配置来接受外部操作以输入一目标位置;及一控制器,连接该大车驱动器、该小车驱动器、该主吊驱动器及该hmi,被配置来基于该目标位置进行路径规划以产生一位置命令,并且利用该绳长信息结合该位置命令计算一防摇摆位置命令;其中,该大车驱动器被配置来基于该防摇摆位置命令以及该主编码器的一位置回授及该辅助编码器的一辅助位置回授进行一全闭环演算,并且基于该全闭环演算后产生的一速度命令及一转矩命令同时控制该主机马达及该从机马达运转。
4、相较于相关技术,本发明先计算出具防摇摆控制效果的位置命令,再依据此位置命令、大车的主机马达及从机马达的位置回授以及辅助编码器的位置回授进行全闭环控制,并且通过转矩分配控制或转矩补偿控制来对主机马达以及从机马达进行纠偏控制,由此实现自动化天车控制架构的最佳化。
技术特征:
1.一种自动化天车的马达控制架构,包括:
2.如权利要求1所述的自动化天车的马达控制架构,其中该主机驱动器包括:
3.如权利要求2所述的自动化天车的马达控制架构,其中该从机驱动器包括:
4.如权利要求1所述的自动化天车的马达控制架构,其中该主机驱动器包括:
5.如权利要求4所述的自动化天车的马达控制架构,其中该从机驱动器包括:
6.如权利要求1所述的自动化天车的马达控制架构,其中该主机驱动器包括:
7.如权利要求6所述的自动化天车的马达控制架构,其中该从机驱动器包括:
8.如权利要求1所述的自动化天车的马达控制架构,其中该大车包括受该主机马达驱动的一第一车轮组及受该从机马达驱动的一第二车轮组,该主轨道包括供该第一车轮组移动的一第一轨道及供该第二车轮组移动的一第二轨道,该辅助编码器包括一主机辅助编码器及一从机辅助编码器,其中该主机辅助编码器设置于该第一轨道上并且被配置来检测该第一车轮组以产生一主机辅助位置回授,该从机辅助编码器设置于该第二轨道上并且被配置来检测该第二车轮组以产生一从机辅助位置回授。
9.如权利要求8所述的自动化天车的马达控制架构,其中该主机驱动器包括:
10.如权利要求9所述的自动化天车的马达控制架构,其中该从机驱动器包括:
11.如权利要求1所述的自动化天车的马达控制架构,其中该小车驱动器包括:
12.如权利要求1所述的自动化天车的马达控制架构,其中进行该全闭环演算的软体或硬体包括:
13.如权利要求1所述的自动化天车的马达控制架构,其中该路径规划包括取得一初始位置、一中继点及该目标位置,其中该防摇摆位置命令为一周期性同步位置命令。
14.如权利要求13所述的自动化天车的马达控制架构,其中该路径规划还包括取得一禁区或一障碍物的位置信息。
15.如权利要求1所述的自动化天车的马达控制架构,还包括一通信界面,其中该主机驱动器与该从机驱动器通过该通信界面进行有线连接或无线连接。
16.如权利要求15所述的自动化天车的马达控制架构,其中该大车包括受该主机马达驱动的一第一车轮组及受该从机马达驱动的一第二车轮组,该主轨道包括供该第一车轮组移动的一第一轨道及供该第二车轮组移动的一第二轨道,该辅助编码器配置于该第一轨道或该第二轨道,其中该辅助编码器配置于该第一轨道并且被配置来检测该第一车轮组以产生该辅助位置回授并提供给该主机驱动器,该从机驱动器通过该通信界面自该主机驱动器取得该辅助位置回授。
17.如权利要求15所述的自动化天车的马达控制架构,其中该大车包括受该主机马达驱动的一第一车轮组及受该从机马达驱动的一第二车轮组,该主轨道包括供该第一车轮组移动的一第一轨道及供该第二车轮组移动的一第二轨道,该辅助编码器配置于该第一轨道或该第二轨道,该辅助编码器配置于该第二轨道并且被配置来检测该第二车轮组以产生该辅助位置回授并提供给该从机驱动器,该主机驱动器通过该通信界面自该从机驱动器取得该辅助位置回授。
18.一种自动化天车的马达控制架构,包括:
19.如权利要求18所述的自动化天车的马达控制架构,其中该大车驱动器包括:
20.如权利要求18所述的自动化天车的马达控制架构,其中该小车驱动器包括:
技术总结
一种自动化天车的马达控制架构,包括大车、主吊及控制器。大车跨设于具有辅助编码器的主轨道,具有驱动两个马达的主机驱动器及从机驱动器,马达轴上具有主编码器。主吊控制吊绳升降并计算绳长信息。控制器基于绳长信息及位置命令计算防摇摆位置命令。大车的两个驱动器基于防摇摆位置命令及任一主编码器的回授及辅助编码器的回授进行全闭环演算。其中,主机驱动器基于全闭环演算的速度命令控制马达,从机驱动器跟随主机驱动器的速度命令及转矩命令控制另一马达;或者,大车的两个驱动器依据任一主编码器的回授及辅助编码器的回授的位置误差对转矩命令做补偿。
技术研发人员:陈焕璋,柯柏任,吴俊儒,郑隆杰,陈婉屏,张志远
受保护的技术使用者:台达电子工业股份有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!