皮带机智能巡检机器人的制作方法
本发明涉及巡检机器人,是一种皮带机智能巡检机器人。
背景技术:
1、工业上制乙炔的工艺方法主要包括甲烷裂解法、烃类裂解法和电石法,目前我国主要采用的是电石法生产乙炔,电石法生产乙炔的工序是通过输送设备将电石输送至破碎设备中进行破碎,通过输送设备将破碎后的电石输送至发生器进行水解反应,生成乙炔气体和氢氧化钙并释放热量,通过粗乙炔气体清洗除去杂质气体,通过压缩机将油水分离后的乙炔气体送入乙炔罐保存。
2、上述过程中,输送设备采用的是皮带机,由于电石的物理特性以及皮带机传输距离长和托辊数量多的特点,皮带机在输送过程中常常出现电石物料洒落、带体跑偏或托辊出现异常情况,若不及时发现以及处理,容易造成皮带机裙边和隔板处开胶或拉裂,严重时可能会出现输送带断裂的情况,影响整个生产系统的运行效率以及安全性能。
技术实现思路
1、本发明提供了一种皮带机智能巡检机器人,克服了上述现有技术之不足,其能有效解决现有电石运输皮带机存在出现电石物料洒落、带体跑偏或托辊异常情况后不能及时发现的问题。
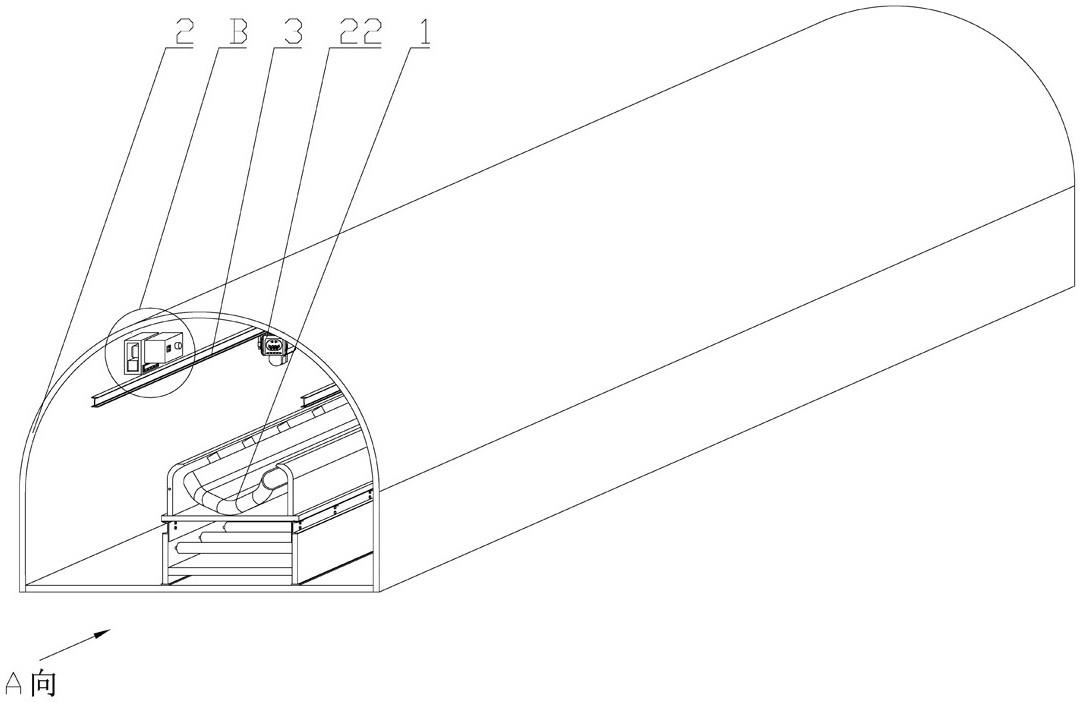
2、本发明的技术方案是通过以下措施来实现的:一种皮带机智能巡检机器人,包括输送巷道和设于输送巷道下部内侧且输送方向为前后向的皮带输送机,还包括设于输送巷道上部内侧用于监测皮带输送机运行状态的巡检机器人,巡检机器人包括轨道和巡检组件,对应皮带输送机上方位置的输送巷道上部内侧固定安装有开口向前的u形轨道,所述轨道的截面呈工字形,轨道左部设有位于皮带输送机左上方的巡检组件,巡检组件包括外壳、热成像采集器、可燃气体探测器、音视频采集器、处理模块和控制模块,外壳上设有用于驱动外壳沿轨道移动的驱动机构,外壳前部右侧安装有热成像采集器,外壳后部右侧安装有可燃气体探测器,外壳下侧安装有音视频采集器,外壳内侧设有处理模块,热成像采集器、可燃气体探测器、音视频采集器均与处理模块连接,处理模块和驱动机构均与控制模块连接。
3、下面是对上述发明技术方案的进一步优化或/和改进:
4、上述驱动机构可包括驱动电机、驱动轮、前支撑组件和后支撑组件,外壳中部内侧左右对称安装有两个驱动电机,每个驱动电机的输出轴上端均固定安装有驱动轮,两个驱动轮与轨道中部外侧相抵,外壳前部上侧设有前支撑组件,前支撑组件包括支撑架和支撑轮,对应驱动电机前方位置的外壳前部上侧安装有开口向上的凵字形支撑架,支撑架左部内侧和右部内侧均转动安装有支撑轮,每个支撑轮下侧均与轨道下部内侧相互接触,外壳后部上侧设有与前支撑组件结构相同且对称分布的后支撑组件,每个驱动电机均与控制模块连接。
5、上述驱动机构还可包括前限位组件和后限位组件,前限位组件包括限位转轴、限位架、限位轮和扭簧,支撑架下部转动安装有限位转轴,限位转轴外侧固定安装有限位架,对应支撑架前方位置的限位架前部转动安装有限位轮,限位转轴和支撑架之间安装有能够使得限位轮上部外侧与轨道下侧相抵的扭簧,后支撑架下部设有与前限位组件结构相同且对称分布的后限位组件。
6、上述驱动机构还可包括前导向组件和后导向组件,前导向组件包括左导向架、右导向架、左导向轮和右导向轮,支撑架上部右侧安装有前部位于驱动轮前方的右导向架,右导向架前部转动安装有左部内侧与轨道中部右侧相互接触的右导向轮,支撑架上部左侧安装有前部位于驱动轮前方的左导向架,左导向架前部转动安装有右部内侧与轨道中部左侧相互接触的左导向轮,后支撑架上部设有与前导向组件结构相同且对称分布的后导向组件。
7、上述轨道上侧可沿长度方向间隔固定有若干个吊装块,每个吊装块上均设有吊装通孔,每个吊装通孔内均穿设有吊装链条,每个吊装链条的两端均固定有吊装螺杆,每个吊装螺杆上端均和输送巷道上部内侧对应位置固定安装在一起。
8、上述还可包括充电机构和间隔设于外壳内的第一电源模块、电量检测器,热成像采集器、可燃气体探测器、音视频采集器、处理模块、电量检测器和两个驱动电机均与第一电源模块连接,输送巷道内设有充电机构,充电机构包括装配架、电动伸缩杆、控制器、充电桩和第二电源模块,输送巷道上部内侧固定安装有装配架,外壳前部左侧安装有红外线接收器,装配架内间隔安装有电动伸缩杆和第二电源模块,装配架下部右侧固定安装有控制器,对应控制器上方位置的装配架右侧设有左侧与电动伸缩杆的推杆右端固定安装在一起的充电桩,充电桩右侧设有能够与红外线接收器相对应的红外线发射器,电动伸缩杆和红外线发射器均与控制器连接,控制器和充电桩均与第二电源模块连接,红外接收器和处理模块连接。
9、本发明结构合理而紧凑,皮带输送机运输电石的过程中,热成像采集器在移动过程中采集皮带输送机的电机、减速器和托辊的温度信息,可燃气体探测器在移动过程中采集输送巷道内的环境信息,音视频采集器在移动过程中采集皮带输送机的托辊、母带、电机减速器的视频信息以及音频信息,然后处理模块将采集到的信息传输至控制模块,工作人员通过控制模块可远程了解皮带输送机在输送过程中是否出现电石物料洒落、带体跑偏或托辊异常的情况,以便能够及时进行处理,提高皮带输送机的运行效率以及安全性能,具有安全、省力、简便、高效的特点。
技术特征:
1.一种皮带机智能巡检机器人,包括输送巷道和设于输送巷道下部内侧且输送方向为前后向的皮带输送机,其特征在于还包括设于输送巷道上部内侧用于监测皮带输送机运行状态的巡检机器人,巡检机器人包括轨道和巡检组件,对应皮带输送机上方位置的输送巷道上部内侧固定安装有开口向前的u形轨道,所述轨道的截面呈工字形,轨道左部设有位于皮带输送机左上方的巡检组件,巡检组件包括外壳、热成像采集器、可燃气体探测器、音视频采集器、处理模块和控制模块,外壳上设有用于驱动外壳沿轨道移动的驱动机构,外壳前部右侧安装有热成像采集器,外壳后部右侧安装有可燃气体探测器,外壳下侧安装有音视频采集器,外壳内侧设有处理模块,热成像采集器、可燃气体探测器、音视频采集器均与处理模块连接,处理模块和驱动机构均与控制模块连接。
2.根据权利要求1所述的皮带机智能巡检机器人,其特征在于驱动机构包括驱动电机、驱动轮、前支撑组件和后支撑组件,外壳中部内侧左右对称安装有两个驱动电机,每个驱动电机的输出轴上端均固定安装有驱动轮,两个驱动轮与轨道中部外侧相抵,外壳前部上侧设有前支撑组件,前支撑组件包括支撑架和支撑轮,对应驱动电机前方位置的外壳前部上侧安装有开口向上的凵字形支撑架,支撑架左部内侧和右部内侧均转动安装有支撑轮,每个支撑轮下侧均与轨道下部内侧相互接触,外壳后部上侧设有与前支撑组件结构相同且对称分布的后支撑组件,每个驱动电机均与控制模块连接。
3.根据权利要求2所述的皮带机智能巡检机器人,其特征在于驱动机构还包括前限位组件和后限位组件,前限位组件包括限位转轴、限位架、限位轮和扭簧,支撑架下部转动安装有限位转轴,限位转轴外侧固定安装有限位架,对应支撑架前方位置的限位架前部转动安装有限位轮,限位转轴和支撑架之间安装有能够使得限位轮上部外侧与轨道下侧相抵的扭簧,后支撑架下部设有与前限位组件结构相同且对称分布的后限位组件。
4.根据权利要求2或3所述的皮带机智能巡检机器人,其特征在于驱动机构还包括前导向组件和后导向组件,前导向组件包括左导向架、右导向架、左导向轮和右导向轮,支撑架上部右侧安装有前部位于驱动轮前方的右导向架,右导向架前部转动安装有左部内侧与轨道中部右侧相互接触的右导向轮,支撑架上部左侧安装有前部位于驱动轮前方的左导向架,左导向架前部转动安装有右部内侧与轨道中部左侧相互接触的左导向轮,后支撑架上部设有与前导向组件结构相同且对称分布的后导向组件。
5.根据权利要求1或2或3所述的皮带机智能巡检机器人,其特征在于轨道上侧沿长度方向间隔固定有若干个吊装块,每个吊装块上均设有吊装通孔,每个吊装通孔内均穿设有吊装链条,每个吊装链条的两端均固定有吊装螺杆,每个吊装螺杆上端均和输送巷道上部内侧对应位置固定安装在一起。
6.根据权利要求4所述的皮带机智能巡检机器人,其特征在于轨道上侧沿长度方向间隔固定有若干个吊装块,每个吊装块上均设有吊装通孔,每个吊装通孔内均穿设有吊装链条,每个吊装链条的两端均固定有吊装螺杆,每个吊装螺杆上端均和输送巷道上部内侧对应位置固定安装在一起。
7.根据权利要求1或2或3或6所述的皮带机智能巡检机器人,其特征在于还包括充电机构和间隔设于外壳内的第一电源模块、电量检测器,热成像采集器、可燃气体探测器、音视频采集器、处理模块、电量检测器和两个驱动电机均与第一电源模块连接,输送巷道内设有充电机构,充电机构包括装配架、电动伸缩杆、控制器、充电桩和第二电源模块,输送巷道上部内侧固定安装有装配架,外壳前部左侧安装有红外线接收器,装配架内间隔安装有电动伸缩杆和第二电源模块,装配架下部右侧固定安装有控制器,对应控制器上方位置的装配架右侧设有左侧与电动伸缩杆的推杆右端固定安装在一起的充电桩,充电桩右侧设有能够与红外线接收器相对应的红外线发射器,电动伸缩杆和红外线发射器均与控制器连接,控制器和充电桩均与第二电源模块连接,红外接收器和处理模块连接。
8.根据权利要求4所述的皮带机智能巡检机器人,其特征在于还包括充电机构和间隔设于外壳内的第一电源模块、电量检测器,热成像采集器、可燃气体探测器、音视频采集器、处理模块、电量检测器和两个驱动电机均与第一电源模块连接,输送巷道内设有充电机构,充电机构包括装配架、电动伸缩杆、控制器、充电桩和第二电源模块,输送巷道上部内侧固定安装有装配架,外壳前部左侧安装有红外线接收器,装配架内间隔安装有电动伸缩杆和第二电源模块,装配架下部右侧固定安装有控制器,对应控制器上方位置的装配架右侧设有左侧与电动伸缩杆的推杆右端固定安装在一起的充电桩,充电桩右侧设有能够与红外线接收器相对应的红外线发射器,电动伸缩杆和红外线发射器均与控制器连接,控制器和充电桩均与第二电源模块连接,红外接收器和处理模块连接。
9.根据权利要求5所述的皮带机智能巡检机器人,其特征在于还包括充电机构和间隔设于外壳内的第一电源模块、电量检测器,热成像采集器、可燃气体探测器、音视频采集器、处理模块、电量检测器和两个驱动电机均与第一电源模块连接,输送巷道内设有充电机构,充电机构包括装配架、电动伸缩杆、控制器、充电桩和第二电源模块,输送巷道上部内侧固定安装有装配架,外壳前部左侧安装有红外线接收器,装配架内间隔安装有电动伸缩杆和第二电源模块,装配架下部右侧固定安装有控制器,对应控制器上方位置的装配架右侧设有左侧与电动伸缩杆的推杆右端固定安装在一起的充电桩,充电桩右侧设有能够与红外线接收器相对应的红外线发射器,电动伸缩杆和红外线发射器均与控制器连接,控制器和充电桩均与第二电源模块连接,红外接收器和处理模块连接。
技术总结
本发明涉及巡检机器人技术领域,是一种皮带机智能巡检机器人,包括输送巷道和设于输送巷道下部内侧且输送方向为前后向的皮带输送机。本发明结构合理而紧凑,皮带输送机运输电石的过程中,热成像采集器在移动过程中采集皮带输送机的电机、减速器和托辊的温度信息,可燃气体探测器在移动过程中采集输送巷道内的环境信息,音视频采集器在移动过程中采集皮带输送机的托辊、母带、电机减速器的视频信息以及音频信息,然后处理模块将采集到的信息传输至控制模块,工作人员通过控制模块可远程了解皮带输送机在输送过程中是否出现电石物料洒落、带体跑偏或托辊异常的情况,以便能够及时进行处理,提高皮带输送机的运行效率以及安全性能。
技术研发人员:魏三鼎,王磊,张瑞,王振方,张峰,张军胜,张贵兵,康森,王刚,何贇彪,石道圳
受保护的技术使用者:新疆中泰化学阜康能源有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!