筒纱翻转装置、具有该装置的筒纱翻转贴标机器人及贴标方法与流程
本发明涉及纺织机械中的筒纱包装,具体涉及一种筒纱翻转装置、具有该装置的筒纱翻转贴标机器人及贴标方法。
背景技术:
1、筒纱在包装过程中,通常需要在筒纱的纱管内壁贴上可供识别的标签,这就需要在筒纱包装输送线上将筒纱进行翻转,使筒纱的大头朝上,贴标机伸入筒纱的纱管大头内进行贴标。目前现有技术中,如中国专利2021205037347公开了一种筒纱翻转装置,如果利用该筒纱翻转装置进行筒纱翻转及贴标工作,其工作过程为:筒纱进入抱纱夹辊区域→夹辊抱纱→抱紧筒纱升起→筒纱翻转→配合实现贴标→抱纱夹辊整体下落→夹辊打开→然后筒纱输出抱纱夹辊区域→下一个筒纱才能进入抱纱夹辊。即上述筒纱翻转贴标的整个工作过程是一个串行的过程,只有当前一动作完成后才能进行下一个动作,不能并行复合进行,其工作效率低。
技术实现思路
1、为解决上述技术问题,本发明提供了一种筒纱翻转装置、具有该装置的筒纱翻转贴标机器人及贴标方法,该筒纱翻转装置中的抱纱夹辊旋转机构能驱动2组抱纱夹辊机构同时旋转180°,且2组抱纱夹辊机构在工作过程中每次旋转180°后功能互换,在工作过程中能够实现筒纱来纱、夹取准备过程与筒纱贴标、出纱过程复合进行,提高了工作效率。
2、本发明采用以下的技术方案:
3、本发明提供一种筒纱高效翻转装置,包括抱纱夹辊旋转机构、对称设置于抱纱夹辊旋转机构两侧的2组抱纱夹辊机构,所述抱纱夹辊旋转机构能驱动2组抱纱夹辊机构同时旋转;
4、所述抱纱夹辊旋转机构包括旋转固定支架及安装于旋转固定支架顶部的旋转轴,所述旋转轴的一侧连接有旋转驱动电机;
5、所述抱纱夹辊机构包括2个夹辊固定板及设置于2个夹辊固定板之间的双向伸缩件,所述夹辊固定板的一侧与抱纱夹辊旋转机构的旋转轴固定连接,所述夹辊固定板的内侧设置有2个夹辊;所述双向伸缩件位于靠近抱纱夹辊旋转机构的一侧,所述夹辊位于远离抱纱夹辊旋转机构的一侧。
6、进一步地,所述双向伸缩件为双向伸缩气缸。
7、进一步地,所述夹辊为锥形筒,且夹辊的锥度与筒纱锥度相同。
8、进一步地,所述夹辊通过夹辊转轴与夹辊固定板转动连接。
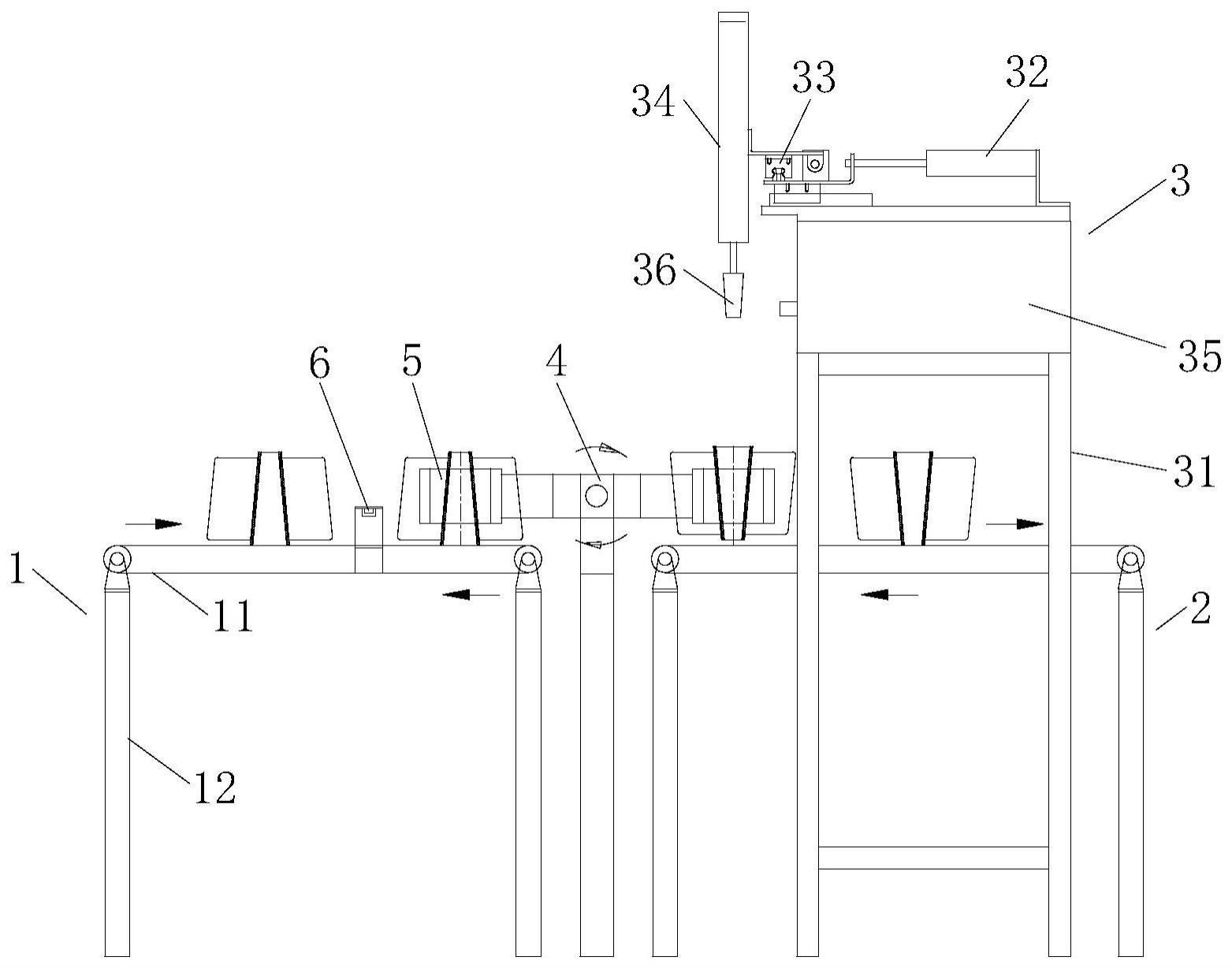
9、本发明还提供一种筒纱翻转贴标机器人,除包括上述一种筒纱高效翻转装置外,还包括进纱输送线、出纱输送线及位于出纱输送线上方且能够伸入筒纱纱管内部的贴标机构,所述抱纱夹辊旋转机构设置于进纱输送线与出纱输送线之间,2组所述抱纱夹辊机构处于水平状态时分别位于进纱输送线及出纱输送线上方,且其中一组抱纱夹辊机构位于进纱输送线的后端,另一组抱纱夹辊机构位于出纱输送线的前端。
10、进一步地,所述进纱输送线上且位于抱纱夹辊机构的前端设置有筒纱定位检测光电。
11、利用上述一种筒纱翻转贴标机器人对筒纱进行贴标,贴标位置为筒纱的纱管内壁,其工作过程为:
12、(1)进纱输送线输送筒纱,当筒纱定位检测光电检测到筒纱离开光电检测区域时,说明此时筒纱到达进纱输送线上方的抱纱夹辊机构的中间,该抱纱夹辊机构的双向伸缩件控制夹辊抱紧筒纱;
13、(2)待进纱输送线上方的抱纱夹辊机构抱紧筒纱,且出纱输送线上方的抱纱夹辊机构处于打开状态时,抱纱夹辊旋转机构带动其两侧的抱纱夹辊机构顺时针翻转180°,其中空的抱纱夹辊机构转动至进纱输送线上方,抱紧筒纱的抱纱夹辊机构转动至出纱输送线上方;
14、(3)待翻转动作完成后,贴标机构吸取标签将标签贴合至出纱输送线上方的筒纱纱管内壁,待贴标完成后,抱紧筒纱的抱纱夹辊机构打开,筒纱落至出纱输送线上将筒纱送出;同时在贴标过程中,位于进纱输送线上方的抱纱夹辊机构继续抱紧下一个筒纱,当确认进纱输送线上方的抱纱夹辊机构抱紧筒纱且出纱输送线上方的抱纱夹辊机构处于打开状态时,抱纱夹辊旋转机构带动其两侧的抱纱夹辊机构顺时针翻转180°,进入下一个工作循环。
15、本发明具有的有益效果是:
16、本发明提供的一种筒纱高效翻转装置及具有该装置的筒纱翻转贴标机器人,包括抱纱夹辊旋转机构及其两侧的2组抱纱夹辊机构,其中靠近进纱输送线一侧的抱纱夹辊机构配合进纱输送线进行来纱和夹紧准备工作,靠近出纱输送线一侧的抱纱夹辊机构配合贴标机及出纱输送线进行贴标及出纱工作,且抱纱夹辊旋转机构能驱动2组抱纱夹辊机构同时旋转180°,2组抱纱夹辊机构在工作过程中每次旋转180°后功能互换,即进行旋转后进入下一个工作循环,本发明能够实现筒纱来纱、夹取准备过程与筒纱贴标、出纱过程复合进行,提高工作效率。
技术特征:
1.一种筒纱翻转装置,其特征在于,包括抱纱夹辊旋转机构、对称设置于抱纱夹辊旋转机构两侧的2组抱纱夹辊机构,所述抱纱夹辊旋转机构能驱动2组抱纱夹辊机构同时旋转;
2.根据权利要求1所述的一种筒纱翻转装置,其特征在于,所述双向伸缩件为双向伸缩气缸。
3.根据权利要求1所述的一种筒纱翻转装置,其特征在于,所述夹辊为锥形筒,且夹辊的锥度与筒纱锥度相同。
4.根据权利要求1所述的一种筒纱翻转装置,其特征在于,所述夹辊通过夹辊转轴与夹辊固定板转动连接。
5.一种筒纱翻转贴标机器人,其特征在于,包括权利要求1-4任一项所述的一种筒纱翻转装置。
6.根据权利要求5所述的一种筒纱翻转贴标机器人,其特征在于,还包括进纱输送线、出纱输送线及位于出纱输送线上方且能够伸入筒纱纱管内部的贴标机构,所述抱纱夹辊旋转机构设置于进纱输送线与出纱输送线之间,2组所述抱纱夹辊机构处于水平状态时分别位于进纱输送线及出纱输送线上方,且其中一组抱纱夹辊机构位于进纱输送线的后端,另一组抱纱夹辊机构位于出纱输送线的前端。
7.根据权利要求6所述的一种筒纱翻转贴标机器人,其特征在于,所述进纱输送线上且位于抱纱夹辊机构的前端设置有筒纱定位检测光电。
8.一种筒纱翻转贴标机器人的贴标方法,其特征在于,利用权利要求5-8任一项所述的一种筒纱翻转贴标机器人,包括如下步骤:
技术总结
本发明公开了筒纱翻转装置、具有该装置的筒纱翻转贴标机器人及贴标方法,该翻转装置包括抱纱夹辊旋转机构、对称设置于抱纱夹辊旋转机构两侧的2组抱纱夹辊机构,所述抱纱夹辊旋转机构能驱动2组抱纱夹辊机构同时旋转;所述抱纱夹辊旋转机构包括旋转固定支架及安装于旋转固定支架顶部的旋转轴,所述旋转轴的一侧连接有旋转驱动电机;所述抱纱夹辊机构包括2个夹辊固定板及设置于2个夹辊固定板之间的双向伸缩件,所述夹辊固定板的一侧与抱纱夹辊旋转机构的旋转轴固定连接,所述夹辊固定板的内侧设置有2个夹辊。本发明的筒纱翻转贴标机器人利用该筒纱高效翻转装置能够实现筒纱来纱、夹取准备过程与筒纱贴标、出纱过程的复合进行,提高了工作效率。
技术研发人员:赵传福,王森栋,崔桂华,马恒印,贺凯,李大鹏,傅洪伟
受保护的技术使用者:赛特环球机械(青岛)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!