一种搬运机器人
本发明涉及机器人结构的,具体而言,涉及一种搬运机器人。
背景技术:
1、机器人可以运行预先编排的程序,按照人类的指挥执行任务,随着科技的不断创新与进步,机器人系统在各个领域的应用越来越广泛。目前,工业机器人的应用领域主要有弧焊、点焊、装配、搬用、喷漆、检测、研磨抛光、激光加工等,其中搬运机器人在搬运工作上应用广泛。
2、公开号为cn107322565b的中国发明专利公开了一种搬运机器人,所述搬运机器人包括:基座;拨动装置,包括拨杆与支座,所述拨杆设在所述支座上,所述拨杆绕y轴转动,所述支座绕z轴转动;抓取装置,包括支架、机械手,所述机械手包括第一半圆柱壳、第二半圆柱壳,所述第一半圆柱壳固定在所述支架上,所述第二半圆柱壳与所述支架可转动连接,所述第二半圆柱壳相对所述第一半圆柱壳配合形成圆柱壳;行走装置,设在所述基座上,用于驱动所述基座移动。通过拨动装置将圆柱型的物体拨向抓取装置,抓取装置通过可开合的第二半圆柱壳与第一半圆柱壳配合形成抓取的结构。两个半圆柱壳形成的机械手,抓取过程与圆柱物体的外壁能够有较大的接触面积,能够稳定抓取圆柱型物体。
3、然而上述搬运机器人只能搬运竖直放置的圆柱物体,圆柱物体在摆放过程中可能会跌倒而水平放置,不能搬运水平放置的圆柱物体。
技术实现思路
1、基于此,为了解决上述的问题,本发明提供了一种搬运机器人,其具体技术方案如下:
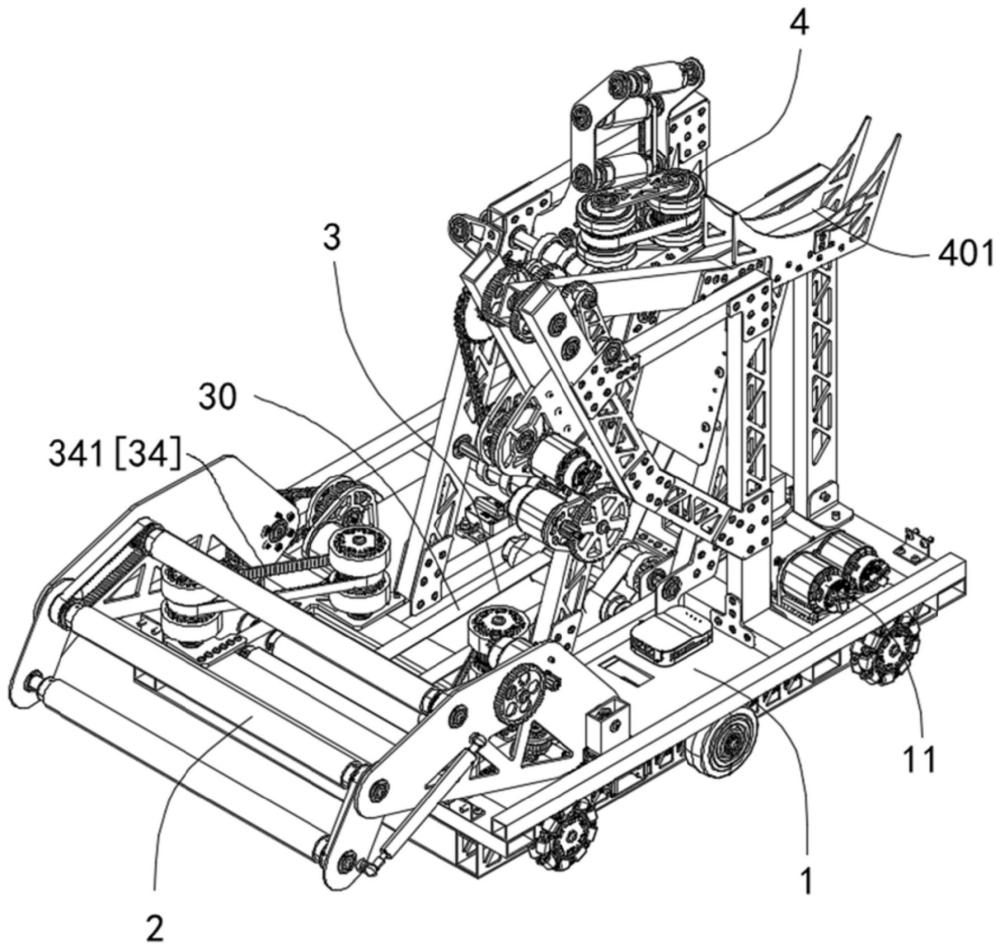
2、一种搬运机器人,包括:
3、底盘,安装有用于行走的行走部件;
4、拾取前臂,包括可相对于所述底盘进行摆动的前臂体以及设置在前臂体上的输送辊部件,所述输送辊部件用于拾取水平放置的圆柱物体;
5、输送机构,包括传送带部件,所述传送带部件用于接收输送辊部件输送过来的圆柱物体;
6、调整机构,包括顶送部件和支撑臂部件,所述支撑臂部件包括设有支撑位的支撑梁体,所述顶送部件用于将传送带部件传送过来的圆柱物体顶送到所述支撑位上。
7、上述搬运机器人,通过摆动前臂体,使输送辊部件摆放至水平放置的圆柱物体的底部,使圆柱物体随着输送辊部件传送到传送带部件,然后利用顶送部件顶送到所述支撑位上,利用行走部件将圆柱物体搬运到指定位置。
8、进一步地,所述前臂体包括第一支臂、与第一支臂铰接的第二支臂以及控制第二支臂相对于第一支臂进行摆动的摆动缸;所述输送辊部件包括第一电机、受第一电机驱动的皮带轮组件以及与皮带轮组件传动连接的若干辊筒。
9、进一步地,所述传送带部件包括第一传送组件、第二传送组件、第三传送组件以及侧传送组件;所述第一传送组件、第二传送组件、第三传送组件依次设置,所述侧传送组件包括分别设置在所述第一传送组件两侧的侧传送带。
10、进一步地,所述第一传送组件包括水平设置的第一传送带,所述第二传送组件包括相对于所述第一传送带倾斜设置的第二传送带,所述第三传送组件包括传动辅助板和相对于传动辅助板平行设置的第三传送带;所述第三传送带与所述传动辅助板形成上升传送通道。
11、进一步地,所述顶送部件包括设置在所述上升传送通道顶端的顶送臂组件和辅助轮组件,所述顶送臂组件包括顶臂和设置在顶臂上的顶送轮单元;所述辅助轮组件包括辅助转轮,所述顶送轮单元与所述辅助转轮共同作用将传送到所述上升传送通道顶端的圆柱物体移送至所述支撑位上。
12、进一步地,所述支撑梁体包括支撑架和支梁,所述支梁上设有弧形块和设置在弧形块侧面的折弯限位条,所述弧形块和所述折弯限位条形成所述支撑位。
13、进一步地,所述行走部件包括设置在所述底盘后端的两个主动轮单元以及至少四个从动轮单元;所述主动轮单元包括安装架、设置在安装架上的两个伺服电机、受两个伺服电机共同驱动的主动轴、以及与主动轴轮毂连接的主动轮体;所述从动轮单元与所述主动轴通过链轮链条组件传动连接。
14、进一步地,所述搬运机器人还包括安装部件和设置在安装部件上的夹持臂部件;所述夹持臂部件用于夹持竖直放置的圆柱物体。
15、进一步地,所述夹持臂部件包括摆动臂组件和夹持臂组件;所述摆动臂组件包括摆动臂体和第二电机、主动链轮、与主动链轮链条传动的从动链轮,所述第二电机和主动链轮设置在所述摆动臂体上,所述主动链轮可转动安装在所述安装部件上,所述第二电机驱动所述主动链轮,从而带动摆动臂体相对于所述从动链轮进行转动;所述夹持臂组件包括设置在所述摆动臂体上的夹持架、设置在夹持架上的第三电机、齿轮单元和铰接在一起的两夹持臂体,所述第三电机设置在所述的两夹持臂体的铰接中心;所述第三电机通过所述齿轮单元驱动所述的两夹持臂体进行开合夹持动作。
16、进一步地,所述安装部件包括龙门架体和升降组件,所述升降组件包括设置在所述龙门架体底部的第四电机、受第四电机驱动的升降传动带以及固定安装在升降传动带上的滑座;所述摆动臂体的一端与所述从动链轮铰接在所述滑座上,所述第四电机驱动所述滑座相对于龙门架体进行升降运动。
技术特征:
1.一种搬运机器人,其特征在于,包括:
2.根据权利要求1所述的一种搬运机器人,其特征在于,所述前臂体包括第一支臂、与第一支臂铰接的第二支臂以及控制第二支臂相对于第一支臂进行摆动的摆动缸;
3.根据权利要求1所述的一种搬运机器人,其特征在于,所述传送带部件包括第一传送组件、第二传送组件、第三传送组件以及侧传送组件;
4.根据权利要求3所述的一种搬运机器人,其特征在于,所述第一传送组件包括水平设置的第一传送带,所述第二传送组件包括相对于所述第一传送带倾斜设置的第二传送带,所述第三传送组件包括传动辅助板和相对于传动辅助板平行设置的第三传送带;
5.根据权利要求4所述的一种搬运机器人,其特征在于,所述顶送部件包括设置在所述上升传送通道顶端的顶送臂组件和辅助轮组件,所述顶送臂组件包括顶臂和设置在顶臂上的顶送轮单元;
6.根据权利要求5所述的一种搬运机器人,其特征在于,所述支撑梁体包括支撑架和支梁,所述支梁上设有弧形块和设置在弧形块侧面的折弯限位条,所述弧形块和所述折弯限位条形成所述支撑位。
7.根据权利要求1所述的一种搬运机器人,其特征在于,所述行走部件包括设置在所述底盘后端的两个主动轮单元以及至少四个从动轮单元;
8.根据权利要求1所述的一种搬运机器人,其特征在于,所述搬运机器人还包括安装部件和设置在安装部件上的夹持臂部件;
9.根据权利要求8所述的一种搬运机器人,其特征在于,所述夹持臂部件包括摆动臂组件和夹持臂组件;
10.根据权利要求9所述的一种搬运机器人,其特征在于,所述安装部件包括龙门架体和升降组件,所述升降组件包括设置在所述龙门架体底部的第四电机、受第四电机驱动的升降传动带以及固定安装在升降传动带上的滑座;
技术总结
本发明提供了一种搬运机器人,包括底盘、拾取前臂、输送机构和调整机构安装有用于行走的行走部件;拾取前臂包括可相对于底盘进行摆动的前臂体以及设置在前臂体上的输送辊部件,输送辊部件用于拾取水平放置的圆柱物体;输送机构包括传送带部件,传送带部件用于接收输送辊部件输送过来的圆柱物体;调整机构包括顶送部件和支撑臂部件,支撑臂部件包括设有支撑位的支撑梁体,顶送部件用于将传送带部件传送过来的圆柱物体顶送到支撑位上。通过摆动前臂体,使输送辊部件摆放至水平放置的圆柱物体的底部,使圆柱物体随着输送辊部件传送到传送带部件,然后利用顶送部件顶送到支撑位上,利用行走部件将圆柱物体搬运到指定位置。
技术研发人员:肖桂英,伏焕昌,李玉忠
受保护的技术使用者:广州理工学院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!