AGV双料爪取料机构的制作方法
本发明涉及料盒上下料的,具体为agv双料爪取料机构。
背景技术:
1、目前框架料盒及切割料盒转移方式为人员手动转移,上料时人员将框架料盒及切割料盒所对应的满料料盒分别放至对应工位,作业完成后再由人员将空料盒分别取下,然后人工搬运至回收储位,,浪费人力且效力低下,且存在一定的取放问题。
技术实现思路
1、针对上述问题,本发明提供了agv双料爪取料机构,其实现框架料盒及切割料盒的自动上下料,且上下料准确可靠。
2、agv双料爪取料机构,其特征在于,其包括:
3、agv行走模块;
4、手臂控制及子控制系统模块;
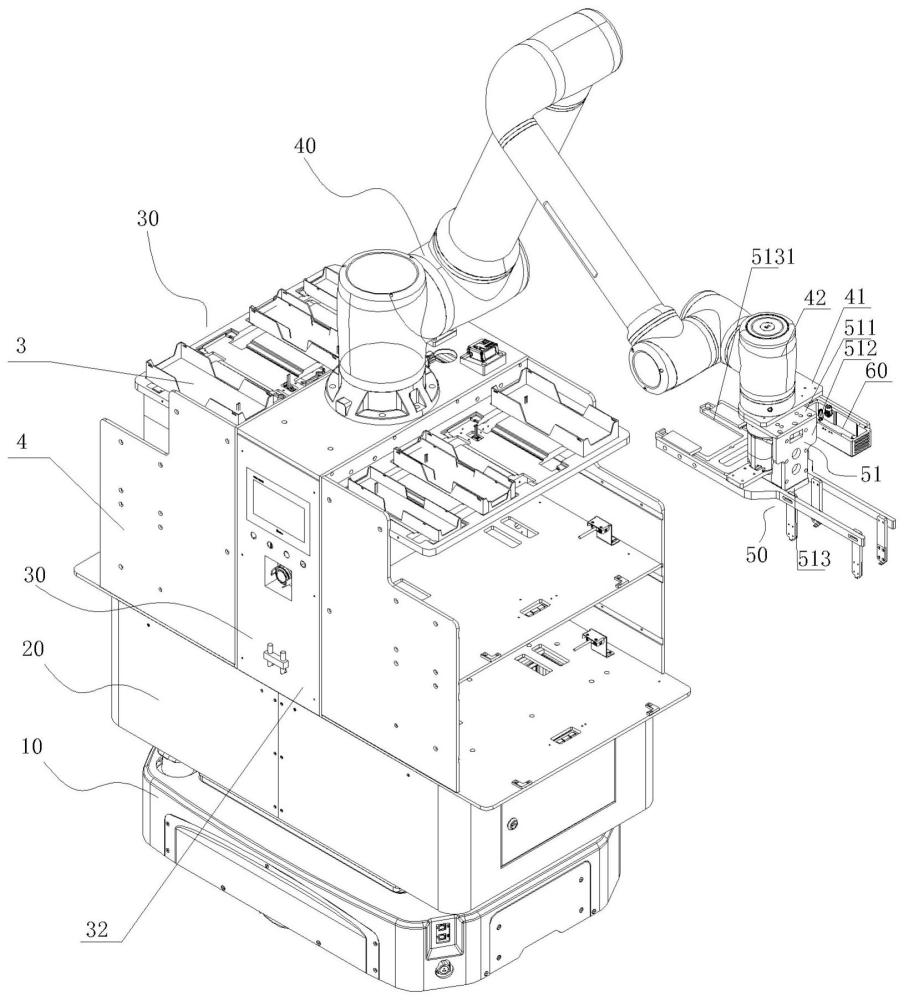
5、上部机壳,其长度方向两侧分别设置有料盒存放工位区域,上部机壳的长度方向中部设置有安装座;
6、多轴机械手;
7、视觉定位搭载模块;
8、以及双料爪模块;
9、所述安装座的上部固装有多轴机械手的机座,所述多轴机械手的输出端安装有连接板,所述连接板上安装有视觉定位搭载模块、双料爪模块,每侧的料盒存放工位区域包括框架料盒存放工位区域、切割料盒存放工位区域;
10、所述多轴机械手驱动双料爪模块分别夹持框架料盒或切割料盒动作,所述视觉定位搭载模块的镜头用于捕捉双料爪模块的动作图像、完成对应料盒的定位放置。
11、其进一步特征在于:
12、所述双料爪模块包括连接架、开合机构、框架料盒夹持机构、切割料盒夹持机构,所述连接架包括上连接板、连接立板、连接底框,多轴机械手的末端为旋转电机,所述旋转电机的输出端连接所述连接板,所述连接板连接所述上连接板,所述上连接板的一侧通过连接立板连接连接底框,所述连接底框包括有对应于切割料盒的初步定位框架,所述开合机构的上部固装于所述上连接板,所述开合机构的下部两侧开合侧分别通过传动板固接对应侧边条,每侧的边条均包括框架料盒传动杆、切割料盒传动杆,所述框架料盒传动杆的长度方向两端分别固装有下凸的夹持杆,所述切割料盒传动杆的上部中心位置分别固装有夹持块,所述切割料盒传动杆位于初步定位框架的外侧布置;
13、所述视觉定位搭载模块固装于连接板的下部,采用3d视觉相机,取放料前通过拍摄识别位置标识点可实现料盒精准取放;
14、所述夹持杆的内侧安装橡胶软垫,增加摩擦力且防止夹持力过大料盒变形,所述夹持杆的底端为钩状结构、从而防止料盒脱落;
15、所述初步定位框架开设有缺口框,缺口框的上表面内凹、形成槽状结构,槽状结构和缺口框组合用于对接切割料盒的顶端蘑菇头结构、之后夹持块移动至于蘑菇头结构的上部,确保转运稳定可靠;
16、每侧的所述料盒存放工位区域包括上部的框架料盒存放机构、下部的切割料盒存放机构,所述切割料盒存放机构包括上、下两层,所述切割盒存放机构的上层顶部布置有框架料盒存放机构,框架料盒存放机构的对应侧板固装于所述切割盒存放机构的上层顶部内腔。
17、采用本发明的agv双料爪取料机构后,框架料盒及切割料盒分别设置于框架料盒存放工位区域、切割料盒存放工位区域,料爪抓取物料前通过视觉定位模块识别定位标识,保证取放物料时位置准确;双料爪模块用于抓取框架料盒及切割料盒,可旋转切换,分别抓取两种料盒;多轴机械手便于双料爪模块的稳定可靠移动;其实现框架料盒及切割料盒的自动上下料,且上下料准确可靠。
技术特征:
1.agv双料爪取料机构,其特征在于,其包括:
2.如权利要求1所述的agv双料爪取料机构,其特征在于:所述双料爪模块包括连接架、开合机构、框架料盒夹持机构、切割料盒夹持机构,所述连接架包括上连接板、连接立板、连接底框,多轴机械手的末端为旋转电机,所述旋转电机的输出端连接所述连接板,所述连接板连接所述上连接板,所述上连接板的一侧通过连接立板连接连接底框,所述连接底框包括有对应于切割料盒的初步定位框架,所述开合机构的上部固装于所述上连接板,所述开合机构的下部两侧开合侧分别通过传动板固接对应侧边条,每侧的边条均包括框架料盒传动杆、切割料盒传动杆,所述框架料盒传动杆的长度方向两端分别固装有下凸的夹持杆,所述切割料盒传动杆的上部中心位置分别固装有夹持块,所述切割料盒传动杆位于初步定位框架的外侧布置。
3.如权利要求1所述的agv双料爪取料机构,其特征在于:所述视觉定位搭载模块固装于连接板的下部,采用3d视觉相机,取放料前通过拍摄识别位置标识点可实现料盒精准取放。
4.如权利要求2所述的agv双料爪取料机构,其特征在于:所述夹持杆的内侧安装橡胶软垫,所述夹持杆的底端为钩状结构。
5.如权利要求2所述的agv双料爪取料机构,其特征在于:所述初步定位框架开设有缺口框,缺口框的上表面内凹、形成槽状结构,槽状结构和缺口框组合用于对接切割料盒的顶端蘑菇头结构、之后夹持块移动至于蘑菇头结构的上部。
6.如权利要求1所述的agv双料爪取料机构,其特征在于:每侧的所述料盒存放工位区域包括上部的框架料盒存放机构、下部的切割料盒存放机构,所述切割料盒存放机构包括上、下两层,所述切割盒存放机构的上层顶部布置有框架料盒存放机构,框架料盒存放机构的对应侧板固装于所述切割盒存放机构的上层顶部内腔。
技术总结
本发明提供了AGV双料爪取料机构,其实现框架料盒及切割料盒的自动上下料,且上下料准确可靠。其包括:AGV行走模块;手臂控制及子控制系统模块;上部机壳,其长度方向两侧分别设置有料盒存放工位区域,上部机壳的长度方向中部设置有安装座;多轴机械手;视觉定位搭载模块;以及双料爪模块;所述安装座的上部固装有多轴机械手的机座,所述多轴机械手的输出端安装有连接板,所述连接板上安装有视觉定位搭载模块、双料爪模块,每侧的料盒存放工位区域包括框架料盒存放工位区域、切割料盒存放工位区域;所述多轴机械手驱动双料爪模块分别夹持框架料盒或切割料盒动作,所述视觉定位搭载模块的镜头用于捕捉双料爪模块的动作图像、完成对应料盒的定位放置。
技术研发人员:李岩,盖力甫,崔闯
受保护的技术使用者:华天科技(昆山)电子有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!