基于麦克纳姆轮的航材搬运用智能运输车
本发明涉及运输机器人,具体而言涉及基于麦克纳姆轮的航材搬运用智能运输车。
背景技术:
1、现有的运输航材的货运叉车绝大部分均为人为操控的,少些用于货运的全自动机器人仅限于搬运较小的航材零件,缺少对大型航材零部件的搬运功能。通常情况下,航空维修工厂内的大型航材零部件均采用有人操控的叉车进行货运,时常会出现人手不够的情况。
2、目前的avg运输车通常载货功能比较固定,仅限于小尺寸航材零件的搬运,而航材工厂中,一般包括多尺寸的航材零件,而大尺寸航材通常放置在大型的木制围框中,对运输过程中的避障、减震要求高,目前的运输车在需求、运输两方面的灵活性不能满足运输需求。
3、因此需要一种航材运输车,能够实现工厂导航功能,并能多角度全方位识别避障的同时还能够运送大型的木制围框所承载的大型航材和小型航材零部件,在工厂内实现集群化货物运输系统。
技术实现思路
1、针对现有技术中航材搬运存在的技术问题,本发明的第一方面提出一种基于麦克纳姆轮的航材搬运用智能运输车,包括:
2、底盘;
3、提升部件,连接到所述底盘,所述提升部件被构造成n型横跨在底盘的两侧;
4、搬运部件,设置在所述底盘以及提升部件之间,能被所述提升部件所驱动而升降;
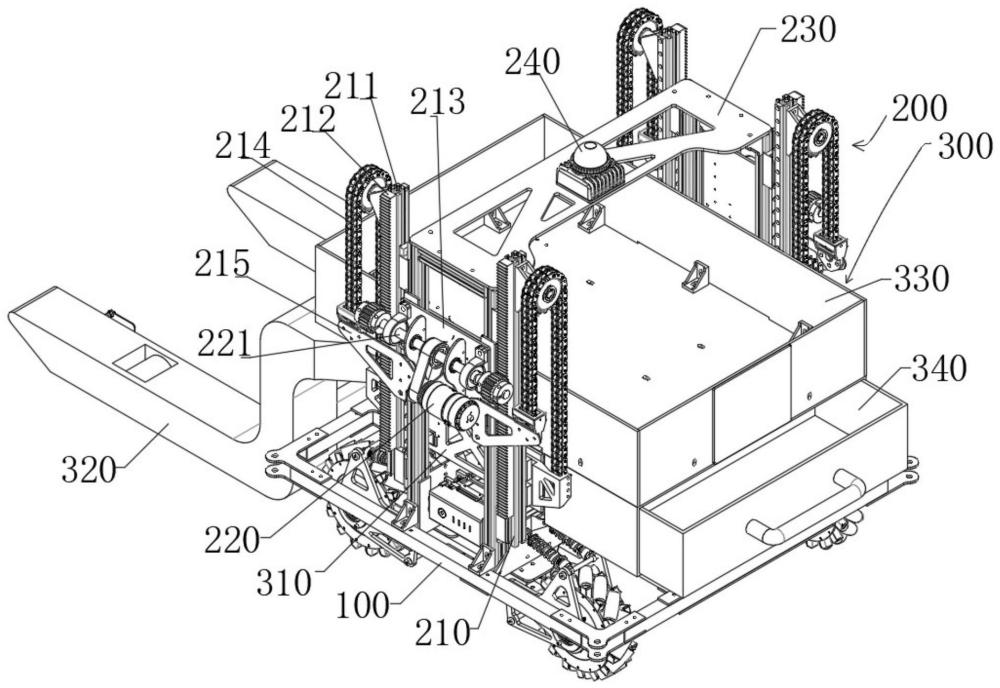
5、其中,所述底盘包括支撑架以及安装到支撑架的麦克纳姆轮组,所述搬运部件包括承载架以及连接到承载架的插齿、第一航材储箱和第二航材储箱,所述提升部件连接到所述承载架,使所述承载架能被驱动而升降;
6、所述插齿位于所述支撑架的前方,所述第一航材储箱位于支撑架的上方,所述第二航材储箱位于支撑架的后方;
7、所述提升部件的顶部设有第一激光雷达,所述支撑架上设有第二激光雷达,所述第二激光雷达位于所述第一航材储箱的下方。
8、优选的,所述支撑架包括框型支架以及横梁结构和纵梁结构,所述横梁结构包括两根横置在所述框型支架之间的纵梁,使框型支架内的空间分为前、中、后三个部分,所述纵梁包括设置在前、中、后三个部分中的纵梁,每部分设置为两根,使框型支架内的空间分隔形成九宫格,在横梁和纵向相交处设有t型加强板;
9、其中,处于四角的空间内分别设置了一个麦克纳姆轮组,两根横梁上设有向上延伸的竖板,所述麦克纳姆轮组与所述竖板之间设有阻尼部件,相邻的两个所述竖板之间设有蓄电池;
10、与运输车前进方向平行的中间三个空间分别设有第一安装板、第二安装板和第一安装板,所述安装板、第二安装板连接到所述纵梁和横梁,所述安装板和第二安装板用于安装第二激光雷达和控制器。
11、优选的,所述麦克纳姆轮组包括麦克纳姆轮、轮毂电机和轮架,所述框型支架的底部纵向布置有两根铝方管,位移一侧的前后两个麦克纳姆轮组分别设置在铝方管的第一端和第二端,所述轮架与铝方管铰接,所述轮架与所述竖板之间设有第一阻尼部件,所述轮架与所述铝方管之间设有第二阻尼部件。
12、优选的,所述第二安装板设有四个向下延伸的支架,所述支架上设有阻尼块,所述阻尼块上设有第三安装板,所述第三安装板上设有控制板。
13、优选的,所述第一阻尼部件包括压缩弹簧,所述第二阻尼部件包括拉伸弹簧,所述第一阻尼部件和第二阻尼部件的阻尼力可调。
14、优选的,所述提升部件包括支撑部件和驱动部件,所述支撑部件包括一对竖直布置的导轨,所述导轨固定到竖板以及框型支架,一对所述导轨之间设有滑台,所述滑台能在所述导轨上滑动,所述驱动部件安装到滑台,并能驱动所述滑台沿所述导轨长度方向运动;
15、所述导轨的一侧设有链轮,所述链轮外设有传动链,所述传动链的第一端连接到滑台,第二端连接到承载架;
16、在框型支架两侧的支撑部件之间设有横板,所述第一激光雷达安装到所述横板。
17、优选的,所述驱动部件包括电机、减速机构和齿轮,所述导轨的一侧设有齿板,所述电机、减速机构均固定到滑台,所述减速机构的输出端设有所述齿轮,所述齿轮和所述齿板啮合。
18、优选的,所述滑台在所述导轨中仅允许沿导轨的长度方向移动,所述齿板设置在导轨沿滑台厚度方向的一侧,所述链轮设置在所述导轨远离所述滑台的一侧。
19、优选的,所述第二航材储箱以抽屉的形式连接在所述第一航材储箱的下方。
20、优选的,所述插齿具有第一叉部和第二叉部,所述第一叉部的内侧后端设有第一光电传感器,所述第二叉部的内侧前端设有第二光电传感器。
21、与现有技术相比,本发明的基于麦克纳姆轮的航材搬运用智能运输车的显著优点在于:
22、本发明提出的基于麦克纳姆轮的航材搬运用智能运输车,采用的麦克纳姆轮x型布局,能够更好地应用于工厂内大转角和过道空间狭小的条件,能够实现机器人360°定向移动,提高了机器人的机动性;上下两个激光雷达的设置能互相弥补视野盲区,在运输车周围建立环境模型,配合运输车的高灵活性,能在工厂内实现集群化货物运输;运输车的搬运部件平衡性好,底盘的减震装置以及核心电子单元的减振保护,能够降低运输车事故率,提高运输车寿命以及航材运输的稳定性和可靠性。
技术特征:
1.一种基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,包括:
2.根据权利要求1所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述支撑架包括框型支架(110)以及横梁结构(120)和纵梁结构(130),所述横梁结构(120)包括两根横置在所述框型支架(110)之间的纵梁,使框型支架(110)内的空间分为前、中、后三个部分,所述纵梁(130)包括设置在前、中、后三个部分中的纵梁,每部分设置为两根,使框型支架(110)内的空间分隔形成九宫格,在横梁和纵向相交处设有t型加强板;
3.根据权利要求2所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述麦克纳姆轮组(140)包括麦克纳姆轮(141)、轮毂电机(142)和轮架(143),所述框型支架(110)的底部纵向布置有两根铝方管(146),位移一侧的前后两个麦克纳姆轮组(140)分别设置在铝方管(146)的第一端和第二端,所述轮架(143)与铝方管(146)铰接,所述轮架(143)与所述竖板(111)之间设有第一阻尼部件(144),所述轮架(143)与所述铝方管(146)之间设有第二阻尼部件(145)。
4.根据权利要求3所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述第二安装板(113)设有四个向下延伸的支架,所述支架上设有阻尼块(115),所述阻尼块(115)上设有第三安装板(114),所述第三安装板(114)上设有控制板(116)。
5.根据权利要求3所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述第一阻尼部件包括压缩弹簧,所述第二阻尼部件包括拉伸弹簧,所述第一阻尼部件和第二阻尼部件的阻尼力可调。
6.根据权利要求2所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述提升部件(200)包括支撑部件(210)和驱动部件(220),所述支撑部件(210)包括一对竖直布置的导轨(211),所述导轨(211)固定到竖板(111)以及框型支架(110),一对所述导轨(211)之间设有滑台(213),所述滑台(213)能在所述导轨(211)上滑动,所述驱动部件(220)安装到滑台(213),并能驱动所述滑台(213)沿所述导轨(211)长度方向运动;
7.根据权利要求6所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述驱动部件(220)包括电机、减速机构和齿轮,所述导轨(211)的一侧设有齿板(212),所述电机、减速机构均固定到滑台(213),所述减速机构的输出端设有所述齿轮,所述齿轮和所述齿板(212)啮合。
8.根据权利要求7所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述滑台(213)在所述导轨(211)中仅允许沿导轨(211)的长度方向移动,所述齿板(212)设置在导轨(211)沿滑台(213)厚度方向的一侧,所述链轮设置在所述导轨(211)远离所述滑台(213)的一侧。
9.根据权利要求1-8中的任意一项所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述第二航材储箱(340)以抽屉的形式连接在所述第一航材储箱(330)的下方。
10.根据权利要求1-8中的任意一项所述的基于麦克纳姆轮的航材搬运用智能运输车,其特征在于,所述插齿(320)具有第一叉部和第二叉部,所述第一叉部的内侧后端设有第一光电传感器(321),所述第二叉部的内侧前端设有第二光电传感器(322)。
技术总结
本发明涉及机器人技术领域,具体而言涉及基于麦克纳姆轮的航材搬运用智能运输车,包括:底盘;提升部件,连接到所述底盘,所述提升部件被构造成n型横跨在底盘的两侧;搬运部件,设置在所述底盘以及提升部件之间,能被所述提升部件所驱动而升降;其中,所述底盘包括支撑架以及安装到支撑架的麦克纳姆轮组。采用的麦克纳姆轮X型布局能够更好地应用于工厂内大转角和过道空间狭小的条件,上下两个激光雷达的设置能互相弥补视野盲区,配合运输车的高灵活性,能在工厂内实现集群化货物运输;运输车的搬运部件平衡性好,底盘的减震装置以及核心电子单元的减振保护,能够降低运输车事故率,提高运输车寿命以及航材运输的稳定性和可靠性。
技术研发人员:林瀚,付宇,闫旭,于军力,李泉明,范承志,王炫
受保护的技术使用者:中国民航大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!