自动化冷库系统及其纠偏控制方法与流程
本发明涉及样本存储领域,具体提供一种自动化冷库系统及其纠偏控制方法。
背景技术:
1、随着全球生物技术与医学研究手段的不断进步,对生物样本库建设也提出了更高要求,越来越多的生物样本库将会完成人工存储向自动化存储的转变,生物样本全自动存储设备在实现高效、智能、安全存取的基础上,能够进一步解决生物样本管理流程的规范化、标准化、信息化问题,将成为未来生物样本库建设的必备设施。
2、现有的自动化超低温样本库都基于固定坐标,控制机械臂在库内按照每个库位最初测量的三维坐标进行取放样本盒,在库位发生缩胀或位移之后,机械臂容易与货架产生碰撞,从而对机械臂、货架和样本产生损坏。
3、综上所述,现有自动化冷库系统在库位发生缩胀或位移之后机械臂容易与货架产生碰撞。
4、相应地,本领域需要一种新的自动化冷库系统及其纠偏控制方法来解决上述问题。
技术实现思路
1、本发明旨在解决上述技术问题,即,解决现有自动化冷库系统在库位发生缩胀或位移之后机械臂容易与货架产生碰撞的问题。
2、在第一方面,本发明提供一种自动化冷库系统的纠偏控制方法,所述自动化冷库系统包括控制器、冻存架、采集装置和机械臂;
3、所述冻存架上设置有多个库位,每个所述库位对应一个坐标,所述控制器能够控制所述机械臂移动至所述库位的对应坐标,所述采集装置设置在所述机械臂上;
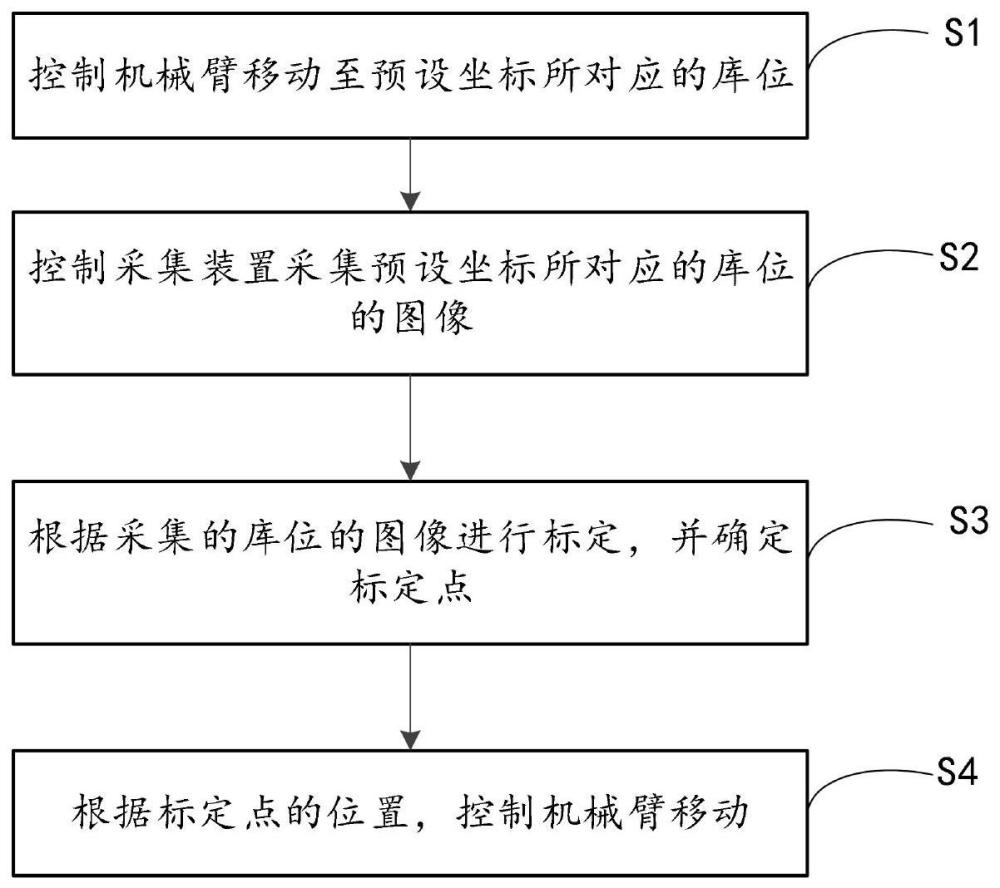
4、所述纠偏控制方法包括:
5、控制所述机械臂移动至预设坐标所对应的所述库位;
6、控制所述采集装置采集所述预设坐标所对应的所述库位的图像;
7、根据采集的所述库位的图像进行标定,并确定标定点;
8、根据所述标定点的位置,控制所述机械臂移动。
9、在上述纠偏控制方法的优选技术方案中,“根据所述标定点的位置,控制所述机械臂移动”的步骤具体包括:
10、如果所述标定点的像素坐标与所述预设坐标所对应的像素坐标不相同,则将所述标定点的像素坐标转化为世界坐标,并根据所述标定点的世界坐标,控制所述机械臂移动。
11、在上述纠偏控制方法的优选技术方案中,“根据所述标定点的位置,控制所述机械臂移动”的步骤还包括:
12、如果所述标定点的像素坐标与所述预设坐标所对应的像素坐标相同,则根据所述预设坐标,控制所述机械臂移动。
13、在上述纠偏控制方法的优选技术方案中,“根据所述标定点的位置,控制所述机械臂移动”的步骤具体包括:
14、如果所述标定点所处的位置在预设范围内,则根据所述预设坐标控制所述机械臂移动。
15、在上述纠偏控制方法的优选技术方案中,根据所述标定点的位置,控制所述机械臂移动”的步骤还包括:
16、如果所述标定点所处的位置不在预设范围内,则根据所述标定点控制所述机械臂移动。
17、在上述纠偏控制方法的优选技术方案中,以采集到的图像的上方水平线与左侧垂直线的连接点为像素坐标系的原点建像素坐标系,识别所述标定点在像素坐标系的像素坐标(u,v),代入像素坐标和世界坐标的转化公式求得所述标定点所对应的世界坐标(xw,yw,zw);像素坐标和世界坐标的转化公式:
18、
19、其中:
20、zc代表的是采集装置与库位之间的深度值;
21、(u,v)是标定点在图像像素坐标系的坐标;
22、(u0,v0)为图像像素坐标系中的中心点的坐标;
23、fx和fy代表的是采集装置的焦距;
24、r代表采集装置标定结果的旋转矩阵;
25、t代表采集装置标定结果的平移矩阵;
26、(xw,yw,zw)代表物体在世界坐标系中的坐标的坐标值。
27、在上述纠偏控制方法的优选技术方案中,所述库位两侧设置有第一标定件和第二标定件,所述第一标定件和所述第二标定件中心点连接线的中点所对应的坐标为所述预设坐标;
28、“根据采集的所述库位的图像进行标定,并确定标定点”的具体步骤包括:
29、所述第一标定件和所述第二标定件中心点连接线的中点为所述标定点。
30、在上述纠偏控制方法的优选技术方案中,所述库位上设置有第一标定件,所述第一标定件的中心点所对应的坐标为预设坐标
31、“根据采集的所述库位的图像进行标定,并确定标定点”的具体步骤包括:
32、所述第一标定件的中心点为所述标定点。
33、在第二方面,本发明还提供一种自动化冷库系统,包括控制器,所述控制器配置成能够执行上述优选技术方案中任一项所述的纠偏控制方法。
34、在上述自动化冷库系统的优选技术方案中,所述第一标定件和所述第二标定件设置在所述库位的下方,且设置成能够限制所述库位内的存放件移动。
35、在采用上述技术方案的情况下,本发明自动化冷库系统包括控制器、冻存架、采集装置和机械臂;冻存架上设置有多个库位,每个库位对应一个坐标,控制器能够控制机械臂移动至库位的对应坐标,采集装置设置在机械臂上;本发明的纠偏控制方法首先控制机械臂移动至预设坐标所对应的库位;之后控制采集装置采集预设坐标所对应的库位的图像;根据采集的库位的图像进行标定,并确定标定点;根据标定点的位置,控制机械臂移动。本发明将机械臂移动至预设位置,之后利用采集装置对库位进行图像采集,对采集的库位图像进行标定,根据重新确定的标定点来控制机械臂移动,避免库位发生膨胀或位移后机械臂与库位发生碰撞,从而防止机械臂、货架和样本损坏,减小故障率。
技术特征:
1.一种自动化冷库系统的纠偏控制方法,其特征在于,所述自动化冷库系统包括控制器、冻存架、采集装置和机械臂;
2.根据权利要求1所述的纠偏控制方法,其特征在于,“根据所述标定点的位置,控制所述机械臂移动”的步骤具体包括:
3.根据权利要求2所述的纠偏控制方法,其特征在于,“根据所述标定点的位置,控制所述机械臂移动”的步骤还包括:
4.根据权利要求1所述的纠偏控制方法,其特征在于,“根据所述标定点的位置,控制所述机械臂移动”的步骤具体包括:
5.根据权利要求4所述的纠偏控制方法,其特征在于,根据所述标定点的位置,控制所述机械臂移动”的步骤还包括:
6.根据权利要求2或3所述的纠偏控制方法,其特征在于:
7.根据权利要求6所述的纠偏控制方法,其特征在于,所述库位两侧设置有第一标定件和第二标定件,所述第一标定件和所述第二标定件中心点连接线的中点所对应的坐标为所述预设坐标;
8.根据权利要求6所述的纠偏控制方法,其特征在于,所述库位上设置有第一标定件,所述第一标定件的中心点所对应的坐标为预设坐标“根据采集的所述库位的图像进行标定,并确定标定点”的具体步骤包括:
9.一种自动化冷库系统,包括控制器,其特征在于,所述控制器配置成能够执行权利要求1至8中任一项所述的纠偏控制方法。
10.根据引用权利要求7的权利要9所述的自动化冷库系统,其特征在于,所述第一标定件和所述第二标定件设置在所述库位的下方,且设置成能够限制所述库位内的存放件移动。
技术总结
本发明涉及样本存储领域,具体提供一种自动化冷库系统及其纠偏控制方法,旨在解决现有自动化冷库系统在库位发生缩胀或位移之后机械臂容易与货架产生碰撞的问题。为此目的,本发明自动化冷库系统的纠偏控制方法包括:控制机械臂移动至预设坐标所对应的库位;控制采集装置采集预设坐标所对应的库位的图像;根据采集的库位的图像进行标定,并确定标定点;根据标定点的位置,控制机械臂移动。本发明将机械臂移动至预设位置,之后利用采集装置对库位进行图像采集,对采集的库位图像进行标定,根据重新确定的标定点来控制机械臂移动,避免库位发生膨胀或位移后机械臂与库位发生碰撞,从而防止机械臂、货架和样本损坏,减小故障率。
技术研发人员:薛凯,任文广,张守兵,庄乾彤
受保护的技术使用者:青岛海尔生物医疗科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!