一种铲板槽帮的定位摆正装置及其定位摆正方法与流程
本发明涉及一种定位摆正装置及定位摆正方法,尤其是一种铲板槽帮的定位摆正装置及其定位摆正方法,属于刮板输送设备。
背景技术:
1、随着煤矿开采技术的不断发展,国内外刮板输送机不断向大运量,长距离、大功率、长寿命与高可靠性方向发展,相应对刮板机各部件研发提出更高的要求。铲板槽帮是刮板机输送设备关键元件,在运输过程中承受剧烈摩擦,成为使用量和消耗量比较大的元件,铲板槽帮焊接前准确定位摆正是保证运输机整机焊接牢固增加寿命的重要因素。
2、铲板槽帮生产工艺主要还是采用焊接方式,在焊接前需要把铲板槽帮垂直立在底板平台上,定位底面狭窄、铲板槽帮重心在定位底面之外,放置不稳易倾斜翻倒,不容易找正。本智能定位及摆正方法可以有效的通过初步定位、激光测量、调整高度、进入闭环检测重复操作,达到工艺要求。
3、综上所述,现有铲板槽帮采用人工找正,存在工作强度大、劳动强度高和一致性差的问题。
技术实现思路
1、本发明的目的是为了解决现有铲板槽帮采用人工找正,存在工作强度大、劳动强度高和一致性差的问题。进而提供一种铲板槽帮的定位摆正装置及其定位摆正方法。
2、本发明的技术方案是:一种铲板槽帮的定位摆正装置包括底座平台,它还包括两个滑板、两个溜板箱、两个滑板座、两个定向滚轮组、角度调整机构、两个立板推正机构、激光测距装置和两个辅助支撑杆;
3、滑板左右滑动安装在底座平台的y向导轨上,滑板上安装有x向导轨,x向导轨上滑动安装有一个溜板箱,每个溜板箱的侧面安装有一个滑板座,每个滑板座内均安装有一个定向滚轮组,角度调整机构安装在底座平台的中部,实现对铲板槽帮定位过程中的角度调整,两个立板推正机构分别安装在角度调整机构的左右两侧,且两个立板推正机构向铲板槽帮移动进而实现对铲板槽帮的推正,两个辅助支撑杆分别安装在角度调整机构的左右两侧和两个立板推正机构之间。
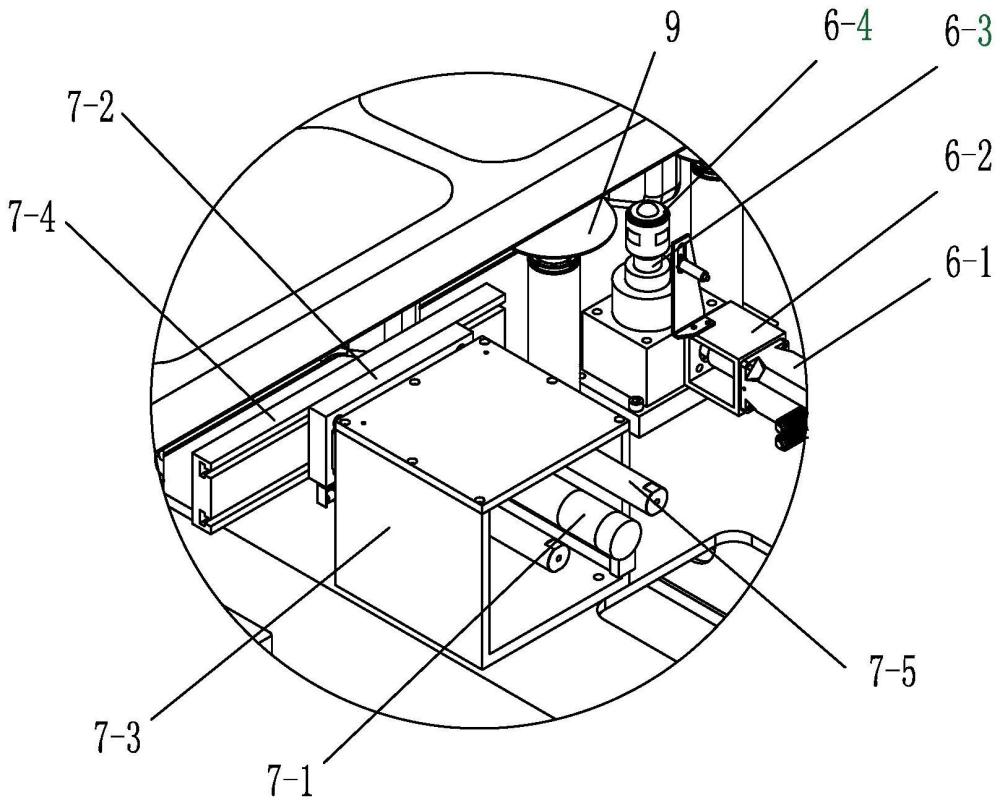
4、进一步地,角度调整机构包括电机、减速器、丝杠和支撑座,电机水平安装在底座平台上,电机的输出轴与减速器连接,丝杠竖直安装在减速器的输出轴上,支撑座安装在丝杠上。
5、优选地,支撑座6-4的上端面为水平支撑座。
6、进一步地,立板推正机构包括液压缸、连接块、壳体、推正板和两个导向杆,壳体安装在中部安装平台上,液压缸水平安装在壳体内,液压缸伸出壳体后与连接块连接,连接块与推正板连接,推正板的前端面在液压缸的作用下实现对铲板槽帮的推正,两个导向杆穿过壳体后与连接块连接。
7、更进一步地,它还包括激光测距装置,激光测距装置安装在溜板箱上,且激光测距装置可升降安装在溜板箱的侧端面上。
8、本发明还提供了一种使用铲板槽帮定位摆正装置的定位摆正方法,它包括以下步骤:
9、步骤一:将铲板槽帮吊运到定位装置的底座平台上;
10、步骤二:定向滚轮组随着滑板座移到预定位置作铲板槽帮定位基准;
11、步骤三:立板推正机构前移推正铲板槽帮;
12、步骤四:检测系统利用激光测距装置测出铲板槽帮两条链轮轨道面的水平距离;
13、步骤五:控制系统根据测量数据判断设计距离与步骤四中激光测距装置测出的水平距离差是否在公差范围,如果在公差范围内,则完成安装摆正工作;如果超出公差范围,控制系统则计算并调整的高度数值;
14、步骤六:立面推正机构后移与铲板槽帮留有间隙;
15、步骤七:角度调整机构根据计算数值,调整铲板槽帮底面高度,翻转摆正铲板槽帮;
16、步骤八:重复步骤三至步骤七,直至设计距离与步骤四中激光测距装置测出的水平距离符合公差要求,立面推正机构将铲板槽帮推正,至此,完成了铲板槽帮的定位摆正。
17、进一步地,步骤一中的铲板槽帮的小平面a由底座平台支撑,同时,辅助支撑杆辅助支撑铲板槽帮的b面。
18、进一步地,步骤二中定向滚轮组随着滑板座移到预定位置为铲板槽帮的c面并作为定位基准。
19、进一步地,步骤三中的立板推正机构,由液压缸推动连接块和推正板实现y向推动铲板槽帮并靠紧定向滚轮组实现y向定位。
20、进一步地,步骤四中所测得的水平距离为铲板槽帮两条链轮轨道d面和e面之间的距离差。
21、本发明与现有技术相比具有以下效果:
22、1、本发明的定位摆正装置能够实现x轴和y轴上的快速滑动,使得其能够快速实现不同规格的铲槽板帮定位摆正,尤其适用于不同长度、高度尺寸的铲槽板帮进行定位摆正,换型方便效率高,能够将操作者从繁重的工作解脱开来,满足铲板槽帮自动化生产的需求。
23、2、本发明的智能定位摆正方法,能够有效的通过“初步定位——激光测量——控制系统换算调整高度——按照换算高度调整铲板槽帮底面——形成闭环重复上述检测调整步骤”。完成自动翻转找正摆正的任务。有效解决了人工调整不准确、误差大,通用性差的问题;
24、3、本发明能够在一台工装上实现铲板槽帮自动定位摆正工作。可快速将不同型号铲板槽帮定位摆正,方便可靠、效率高,可以满足铲板槽帮自动定位摆正的需求。
技术特征:
1.一种铲板槽帮的定位摆正装置,它包括底座平台(1),其特征在于:它还包括两个滑板(2)、两个溜板箱(3)、两个滑板座(4)、两个定向滚轮组(5)、角度调整机构(6)、两个立板推正机构(7)、激光测距装置(8)和两个辅助支撑杆(9);
2.根据权利要求1所述的一种铲板槽帮的定位摆正装置,其特征在于:角度调整机构(6)包括电机(6-1)、减速器(6-2)、丝杠(6-3)和支撑座(6-4),
3.根据权利要求2所述的一种铲板槽帮的定位摆正装置,其特征在于:支撑座(6-4)的上端面为水平支撑座。
4.根据权利要求3所述的一种铲板槽帮的定位摆正装置,其特征在于:立板推正机构(7)包括液压缸(7-1)、连接块(7-2)、壳体(7-3)、推板(7-4)和两个导向杆(7-5),壳体(7-3)安装在底座平台(1)上,液压缸(7-1)水平安装在壳体(7-3)内,液压缸(7-1)伸出壳体(7-3)后与连接块(7-2)连接,连接块(7-2)与推板(7-4)连接,推板(7-4)的前端面在液压缸(7-1)的作用下实现对铲板槽帮的推正,两个导向杆(7-5)穿过壳体(7-3)后与连接块(7-2)连接。
5.根据权利要求4所述的一种铲板槽帮的定位摆正装置,其特征在于:它还包括激光测距装置(8),激光测距装置(8)安装在溜板箱(3)上,且激光测距装置(8)可升降安装在溜板箱(3)的侧端面上。
6.一种使用权利要求1至5中任意一项权利要求所述的一种铲板槽帮的定位摆正装置的定位摆正方法,其特征在于:它包括以下步骤:
7.根据权利要求6所述的一种铲板槽帮的摆正方法,其特征在于:步骤一中的铲板槽帮的小平面a由底座平台(1)支撑,同时,辅助支撑杆(9)支撑铲板槽帮的b面。
8.根据权利要求7所述的一种铲板槽帮的定位摆正方法,其特征在于:步骤二中定向滚轮组(5)随着滑板座(4)移到预定位置为铲板槽帮的c面并作为定位基准。
9.根据权利要求8所述的一种铲板槽帮的定位摆正方法,其特征在于:步骤三中的立板推正机构(7)由液压缸推动连接块(7-2)和推正板(7-4),实现y向推动铲板槽帮并靠紧定向滚轮组(5)实现y向定位。
10.根据权利要求9所述的一种铲板槽帮的定位摆正方法,其特征在于:步骤四中所测得的水平距离为铲板槽帮两条链轮轨道d面和e面之间的距离差。
技术总结
一种铲板槽帮的定位摆正装置及其定位摆正方法,它涉及定位摆正装置及方法。本发明为了解决现有铲板槽帮采用人工找正,存在工作强度大、劳动强度高和一致性差的问题。本发明的滑板座上装有定位滚轮组和激光测距装置。滑板座分别置于底座平台的纵向两端。用于牵引定位滚轮组及对铲板槽帮侧面进行侧面定位基准。激光测距装置用来测量链轮轨道面的距离,通过距离差显示侧面是否是垂直立面。如果侧面是垂直立面,则立面推正机构将铲板槽帮摆正为合格操作。如果测出铲板槽帮不是垂直状态,则角度调整机构通过调整铲板槽帮底面高度进行找正后推紧。本发明用于铲板槽帮的定位摆正。
技术研发人员:赵德民,宋智丽,董曼淑,张威杰,张焱,杨战利,唐麒龙,赵宝,周坤,白德滨,刘福海,杨泽坤,肖秀成,李洪涛,付傲,杨凤君,滕斌,武鹏博,赵树全,谢东权
受保护的技术使用者:中国机械总院集团哈尔滨焊接研究所有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!