自动空箱堆高机遥控操作系统及方法与流程
本发明涉及自动空箱堆高机遥控操作系统及方法,应用于自动化港口空箱堆场业务领域。
背景技术:
1、随着全球经济的不断发展,港口物流成为连接国际贸易的重要中转枢纽;传统港口运输设备与当前港口物流的需求之间的差距也逐渐显露出来,港口自动化建设逐渐成为未来港口发展的趋势和方向。通过对港口空箱堆放区域的无人化、全自动化操作,提高了港口作业效率降低了作业成本。因此,自动空箱堆高机的研发有着重要的意义。自动空箱堆高机虽然是自动化的设备,但是当出现不符合自动运行的情况,甚至严重不可恢复的故障时,仍然需要人的操作才能够解决。当人与自动化设备在同一环境作业时存在安全隐患。
2、鉴于上述技术需求,一种自动空箱堆高机应急处理的操作方式方法是自动空箱堆高机的重要组成部分。
技术实现思路
1、本发明所要解决的技术问题总的来说是提供一种自动空箱堆高机遥控操作系统及方法。
2、为解决上述问题,本发明所采取的技术方案是:
3、为了解决远程遥操作实时性问题,优选的,借助5g通信技术的超高速率、低延迟、大带宽等特点,实现模拟驾驶舱与车载控制器和监控系统的通信。
4、为了实现车载远程遥控接收器与车体控制系统之间的通信稳定性及易用性,优选的,借助于can总线通信实时性强、传输速度快和抗干扰性强的特点,实现车载远程遥控接收器与车体控制系统之间的通信;
5、自动空箱堆高机在自动模式下由调度系统将当前控制模式切换为远程遥操作模式,通过模拟驾驶舱驾驶操作自动空箱堆高机。
6、在模拟驾驶舱中,显示单元用于操作人员实时观察自动空箱堆高机影像系统和车体控制系统状态;
7、进一步地,将影像信息与安全系统融合,完善操作员对周围环境的观察,提高驾驶安全性。
8、在模拟驾驶舱中,为了更接近传统堆高机的操作方式,优选的,通过按下模拟驾驶舱钥匙开关启动远程遥操作驾驶,采用油门和刹车踏板控制自动空箱堆高机运行速度,方向盘控制自动空箱堆高机转向,档位开关选择自动空箱堆高机运行方向,操纵按钮或手柄控制控制吊具和门架执行动作。
9、模拟驾驶舱包括:采用弧形屏幕、方向盘、自复位式按钮、油门踏板、刹车踏板、三位自锁式档位开关、手握式操作手柄和驾驶座椅;通过上述设备实现的功能包括:查看自动空箱堆高机的实时影像和系统状态,控制远程遥操作驾驶启动、驾驶和堆拆集装箱。
10、在模拟驾驶舱中,为了模拟驾驶员视角,优选的,显示单可以通过摇杆、开关和按钮,调整影像角度,为了可以观察远端吊具工作情况,采用了局部影像放大技术。
11、当人是在现场通过遥控器进行操作时,
12、为了解决手动驾驶操作无线连接实时性与稳定性问题,优选的,借助无线射频模块的较远距离传输和较强抗干扰能力等特点,实现手持遥控发射器与车载遥控接收器通信。在自动空箱堆高机安全区域外手动遥控操作。
13、为了解决手动驾驶操作无线连接穿透力较差问题,优选的,借助有线连接连续性、抗干扰性及提供连续不间断电源等特点,实现手持遥控发射器与车载遥控接收器通信。在自动空箱堆高机驾驶室内手动遥控操作。
14、为了实现车载遥控接收器与车体控制系统之间的通信稳定性及易用性,优选的,借助于can总线通信实时性强、传输速度快和抗干扰性强的特点,实现车载远程遥控接收器与车体控制系统之间的通信;
15、为了实现多台自动空箱堆高机共用一套手动驾驶操作设备,优选的,借助于快插连接器的防护等级高和快插方便等特点,实现遥控接收器与车体连接的快速插拔。
16、通过自动空箱堆高机车体控制系统控制面板模式选择开关可以将控制模式切换到手动模式,将自动空箱堆高机控制权移交发射器;按下发射器自复位式按钮,启动手动遥控操作控制权;
17、进一步的,通过旋转自锁式切换开关选择当前手动操作模式,控制自动空箱堆高机执行相应的动作;
18、通过车体控制系统在切出手动模式时将手动最大行驶速度设置为1.5m/s,保证了自动空箱堆高机每次执行手动驾驶操作初始速度一致。
19、进一步的,为了解决误操作情况,通过防呆设计,组合按下发射器按钮、拨杆与摇杆之间的操作关系,操作自动空箱堆高机移动和动作;
20、进一步的,通过发射器指示灯显示的状态,及时了解自动空箱堆高机部分机构与系统的实时状态。
21、本发明的采用远程遥操作驾驶目的是用于自动空箱堆高机自动运行中出现的不可继续自动运行的情况,操作人员通过系统远程协助处理,且这些情况不会影响到自动空箱堆高机的驾驶功能或吊具的运行功能。本发明方便操作员在相对安全的环境下作业,提高了作业效率。
22、本发明通过远程遥操作的方式对自动空箱堆高机启动、驾驶和操作,通过操作模拟驾驶舱操纵手柄和方向盘实现自动空箱堆高机远程遥操作驾驶,可以帮助操作员远程应急处理自动状态下的停机故障。
23、本发明设计合理、成本低廉、结实耐用、安全可靠、操作简单、省时省力、节约资金、结构紧凑且使用方便。
技术特征:
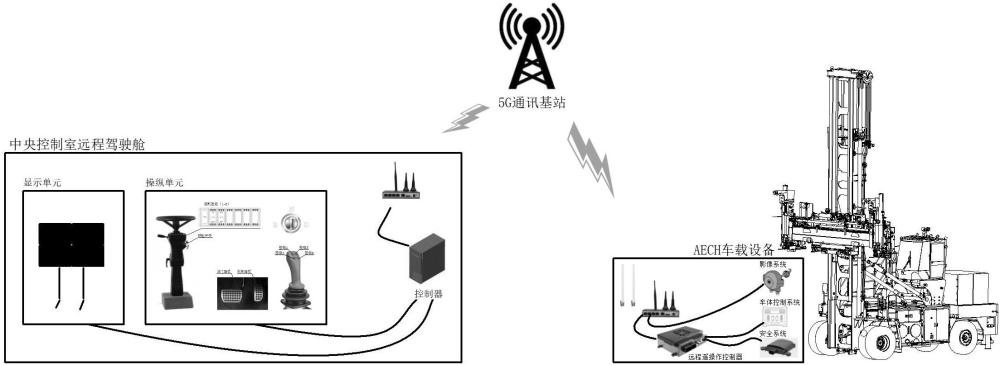
1.一种自动空箱堆高机遥控操作系统,其特征在于:包括堆场内的5g通信基站以及通过5g通信基站交互的中央控制室远程驾驶舱和自动空箱堆高机设备;
2.根据权利要求1所述的自动空箱堆高机遥控操作系统,其特征在于:在自动空箱堆高机设备中,车载远程操作控制器电连接有安全系统;
3.根据权利要求2所述的自动空箱堆高机遥控操作系统,其特征在于: 车载远程操作控制器与模拟驾驶舱通过5g远传通信,控制器与车体控制系统通过can总线通信;车载远程操作控制器,接收模拟驾驶舱与车体控制系统之间不同协议的数据,进行解析再处理后发送。
4.根据权利要求3所述的自动空箱堆高机遥控操作系统,其特征在于:监控系统采用影像系统;车体控制系统通过can总线通信还连接有导航系统及避障系统;导航系统通过4g网络通信连接有调度系统,调度系统通过eth通信与拟驾驶舱通信。
5.根据权利要求4所述的自动空箱堆高机遥控操作系统,其特征在于:自动空箱堆高机在自动模式下,车体控制系统接收到导航控制器发送的启动远程遥操作控制权指令,操作员通过显示单元获得自动空箱堆高机 影像系统和车体控制系统状态,通过模拟驾驶舱进行操作。
6.根据权利要求5所述的自动空箱堆高机遥控操作系统,其特征在于: 影像系统包括安装在驾驶室顶部与吊具上的摄像头;
7.根据权利要求6所述的自动空箱堆高机遥控操作系统,其特征在于:系统还包括手持摇杆式发射器;
8.根据权利要求7所述的自动空箱堆高机遥控操作系统,其特征在于:操控单元具有油门踏板、刹车踏板、操控手柄、控制按钮及钥匙开关。
9.一种自动空箱堆高机遥控操作方法,其特征在于:借助于权利要求1-8任一项所述的系统;方法包括以下方案;
10.根据权利要求9所述的自动空箱堆高机遥控操作方法,其特征在于:在模拟驾驶时,通过踩下刹车踏板,将档位开关旋转至d或r,操作车体前进或后退;切换成功屏幕状态栏于档位开关指示灯显示对应档位;
技术总结
本发明涉及自动空箱堆高机遥控操作系统及方法,其包括堆场内的5G通信基站以及通过5G通信基站交互的中央控制室远程驾驶舱和自动空箱堆高机设备;自动空箱堆高机设备具有通信连接的车载远程操作控制器及通信模块,通讯模块包括通信连接的5G通讯模块、5G路由器及增益天线;中央控制室远程驾驶舱具有后台控制器;通信模块、5G通信基站、后台控制器共同搭建自动空箱堆高机平台,实现模拟驾驶舱与自动空箱堆高机的车载远程操作控制器和监控系统之间的数据传输。本发明设计合理、结构紧凑且使用方便。
技术研发人员:刘长勇,田枫,程海英,王华威,李敏源,杨晨,邹立连,张祥利,杜玉龙,徐孟钊
受保护的技术使用者:青岛新松机器人自动化有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!