一种非连续式磁悬浮输送系统的制作方法
本申请涉及输送线的,尤其涉及一种非连续式磁悬浮输送系统。
背景技术:
1、磁悬浮输送系统应用了一种利用交变磁场来直接驱动运动部件的技术,不仅降低了结构复杂性,还降低了维护成本。因其能克服或者减弱运动过程中产生的惯量、柔顺性、阻尼、摩擦和磨损等困难或者缺陷,带来了高速、高效和精密控制等优点。
2、当前应用的磁悬浮输送系统,为了完全发挥传统输送线体的优势,同时为了减重,在设计上采用了定子组件无铁芯且连续式的布局设计,而连续式磁悬浮输送线的灵活性低,没有单独的运输单元,物体是以流水线的形式运输的,且在维护时需要全面考虑整个系统,修复和更换零部件较为复杂,不仅研发成本高、温度控制要求高,而且对厂房配电提出了更为严格的要求。相应地,因其定子组件无铁芯的设计,带来了断电无法保持位置的问题,相邻的动子模组之间容易发生高速碰撞,从而带来经济损失。
3、综上,急需一种灵活性高且能够在突然断电时能一定程度上减缓动子模组运动状态的非连续式磁悬浮输送系统解决以上问题。
4、上述内容仅用于辅助理解本申请的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本申请的主要目的在于提供一种非连续式磁悬浮输送系统,旨在解决现有的磁悬浮输送线灵活性差,且不能在意外断电时减弱惯性运动,避免发生猛烈碰撞的问题。
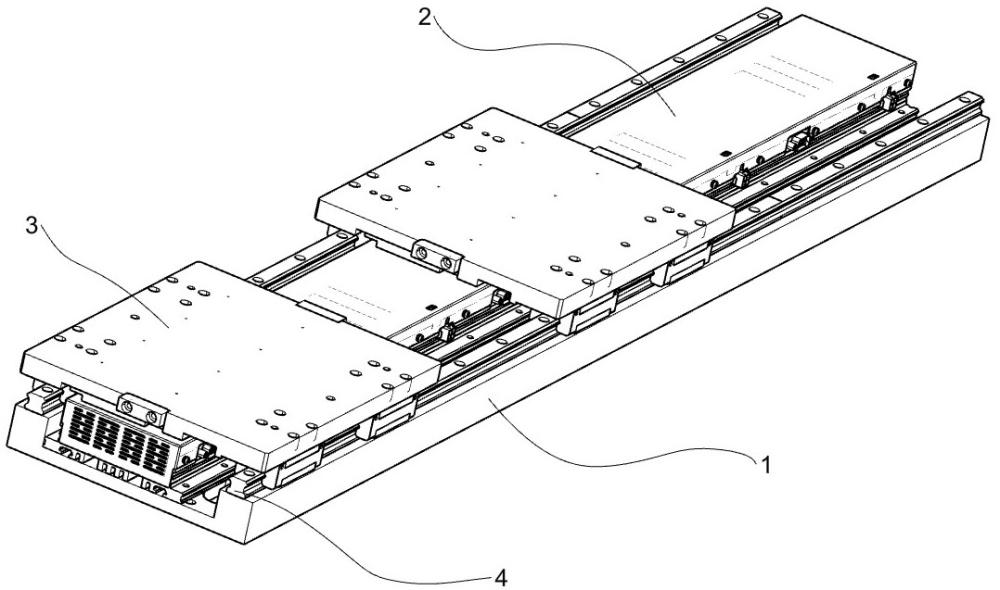
2、为实现上述目的,本申请提供一种非连续式磁悬浮输送系统,包括模组底座,所述模组底座上至少设置有一个定子模组以及一个动子模组,所述定子模组与控制系统电性连接,所述控制系统用于实现对所述定子模组的供电、状态检测和精确控制,所述定子模组用于驱动所述动子模组在所述模组底座上滑动,所述动子模组用于承载需要输送的产品。
3、作为本申请一种优选方案,所述模组底座上设置有导向组件,所述导向组件包括导轨以及滑块,所述导轨的数量为两个一组,两个所述导轨对称设置在所述模组底座上,所述滑块的数量与所述导轨的数量相适配,所述滑块与所述动子模组连接,所述动子模组通过所述滑块与所述导轨滑动连接。
4、作为本申请一种优选方案,所述定子模组包括定子底座、防护罩、定子组件以及检测组件,所述定子底座的一侧与所述模组底座连接,所述定子底座的另一侧连接有所述防护罩,所述防护罩至少设有一个所述定子组件,每一个所述定子组件上设置有所述检测组件,所述检测组件与所述控制系统连接,所述检测组件用于检测所述动子模组的经过的工站状况和当前的位置。
5、作为本申请一种优选方案,所述动子模组包括动子台板、动子磁铁组以及识别码,所述动子台板靠近所述定子模组的一侧设置有所述动子磁铁组以及所述识别码,所述识别码用于被所述检测组件识别。
6、作为本申请一种优选方案,所述控制系统包括定子驱动器、编码器线、动力线以及运动控制器等元器件,所述定子驱动器与所述定子模组通过编码器线和动力线相连接,实现对所述定子模组的供电、状态监测和精确控制,所述运动控制器通过网线与所有的定子驱动器进行通讯和信息交互,实现对整个系统的全闭环控制,所述定子驱动器均和所述定子模组一对一通过线缆相连接,所述定子驱动器之间通过网线串联通讯,所述检测组件和所述定子组件分别通过所述编码器线和所述动力线与所述定子驱动器相连接。
7、作为本申请一种优选方案,所述所述检测组件包括多组霍尔传感器以及至少一个检测传感器,所述霍尔传感器包括入口霍尔组、原点霍尔组以及出口霍尔组,所述入口霍尔组、所述原点霍尔组以及所述出口霍尔组集成在同一电路板上。
8、作为本申请一种优选方案,所述定子组件由多个定子绕组串联组成,所述定子绕组包括铁芯以及线圈,所述线圈围绕所述铁芯设置,并通过绝缘材料封装。
9、作为本申请一种优选方案,所述动子磁铁组包含若干个永磁铁,且若干个所述永磁铁按照n、s极等间距、等角度的方式组合。
10、作为本申请一种优选方案,还包括防撞块,所述动子台板移动方向上对称开设有两个凹槽,所述凹槽上设置有所述防撞块。
11、采用上述技术方案后,本申请的有益效果为:
12、1、本申请提供的一种非连续式磁悬浮输送系统,定子模组采用非连续式安装,定子模组上的线圈长度远小于连续式安装方式,可以有效解决因线圈发热过大导致性能不稳定带来的影响,同时在成本控制上也有一定的优势,还可以有效减少输送线整体的功耗,动子模组无线缆化设计,解决了动子模组的运动限制,所有的动子模组均可实现独立控制,并在复杂轨迹范围内自由移动。无线缆化的设计,进一步避免和降低了线缆拖拽以及因拖链摩擦带来的粉尘和噪音,同时因为动子模组无线缆的设计,允许在工艺路径范围内,布置多个动子,提高输送线和设备的利用率,进一步降低开发成本;
13、2、本申请中定子模组采用有铁芯的设计,突然断电的情况下,线圈与动子模组之间仍然有很大的阻力,可以一定程度上保持或者大幅度减弱动子模组的运动状态,防止高速冲击带来的动子碰撞、飞车等的损害;
14、3、本申请中因动子磁铁和定子线圈采用了无接触式的设计,仅仅通过导向组件连接,实质上只在导向组件之间存在摩擦,不仅在设计上保护了核心部件的不受损耗,还大幅降低了维护成本和维护难度。其带来了另一个好处,线体改造的过程中,核心部件可以毫无损耗的保留,并支持按线体需求增加或者减少部件,不造成核心资产浪费;
15、4、磁悬浮输送线中定子模组采用非连续式布局,相邻定子模组存在一定的安装间隙,在完全保障推力的情况下实现更少数量的布局,即可以节省线体的开发成本,还减少了维护和使用成本;
16、5、因采用模块化的设计,定子模组可以独立控制,定子模组之间仅通过网线进行通讯,实现了定子模组之间的自由拼接和理论上的无限制拓展需求。可以按照实际的应用需求和线体改造要求定制长度和拓展线体。
技术特征:
1.一种非连续式磁悬浮输送系统,其特征在于,包括模组底座,所述模组底座上至少设置有一个定子模组以及一个动子模组,所述定子模组与控制系统电性连接,所述控制系统用于实现对所述定子模组的供电、状态检测和精确控制,所述定子模组用于驱动所述动子模组在所述模组底座上滑动,所述动子模组用于承载需要输送的产品。
2.根据权利要求1所述的一种非连续式磁悬浮输送系统,其特征在于,所述模组底座上设置有导向组件,所述导向组件包括导轨以及滑块,所述导轨的数量为两个一组,两个所述导轨对称设置在所述模组底座上,所述滑块的数量与所述导轨的数量相适配,所述滑块与所述动子模组连接,所述动子模组通过所述滑块与所述导轨滑动连接。
3.根据权利要求1所述的一种非连续式磁悬浮输送系统,其特征在于,所述定子模组包括定子底座、防护罩、定子组件以及检测组件,所述定子底座的一侧与所述模组底座连接,所述定子底座的另一侧连接有所述防护罩,所述防护罩内至少设有一个所述定子组件,每一个所述定子组件上设置有所述检测组件,所述检测组件与所述控制系统连接,所述检测组件用于检测所述动子模组的经过的工站状况和当前的位置。
4.根据权利要求3所述的一种非连续式磁悬浮输送系统,其特征在于,所述动子模组包括动子台板、动子磁铁组以及识别码,所述动子台板靠近所述定子模组的一侧设置有所述动子磁铁组以及所述识别码,所述识别码用于被所述检测组件识别。
5.根据权利要求3所述的一种非连续式磁悬浮输送系统,其特征在于,所述控制系统包括定子驱动器、编码器线、动力线以及运动控制器等元器件,所述定子驱动器与所述定子模组通过编码器线和动力线相连接,实现对所述定子模组的供电、状态监测和精确控制,所述运动控制器通过网线与所有的定子驱动器进行通讯和信息交互,实现对整个系统的全闭环控制,所述定子驱动器均和所述定子模组一对一通过线缆相连接,所述定子驱动器之间通过网线串联通讯,所述检测组件和所述定子组件分别通过所述编码器线和所述动力线与所述定子驱动器相连接。
6.根据权利要求4所述的一种非连续式磁悬浮输送系统,其特征在于,所述所述检测组件包括多组霍尔传感器以及至少一个检测传感器,所述霍尔传感器包括入口霍尔组、原点霍尔组以及出口霍尔组,所述入口霍尔组、所述原点霍尔组以及所述出口霍尔组集成在同一电路板上。
7.根据权利要求3所述的一种非连续式磁悬浮输送系统,其特征在于,所述定子组件由多个定子绕组串联组成,所述定子绕组包括铁芯以及线圈,所述线圈围绕所述铁芯设置,并通过绝缘材料封装。
8.根据权利要求4所述的一种非连续式磁悬浮输送系统,其特征在于,所述动子磁铁组包含若干个永磁铁,且若干个所述永磁铁按照n、s极等间距、等角度的方式组合。
9.根据权利要求4所述的一种非连续式磁悬浮输送系统,其特征在于,还包括防撞块,所述动子台板移动方向上对称开设有两个凹槽,所述凹槽上设置有所述防撞块。
技术总结
本申请涉及输送线的技术领域,公开了一种非连续式磁悬浮输送系统,包括模组底座,所述模组底座上至少设置有一个定子模组以及一个动子模组,所述定子模组与控制系统电性连接,所述控制系统用于实现对所述定子模组的供电、状态检测和精确控制,所述定子模组用于驱动所述动子模组在所述模组底座上滑动,所述动子模组用于承载需要输送的产品;一种非连续式磁悬浮输送系统中定子模组采用非连续式安装,可以独立控制,同时,定子模组采用有铁芯的设计,可以一定程度上保持或者大幅度减弱动子模组的运动状态,防止高速冲击带来的损益。
技术研发人员:卢继成,周秋炎,杜政志
受保护的技术使用者:深圳市广盈智能设备有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!