一种大型贮罐磁吸附机器人入罐装置及方法与流程
本发明涉及一种放射性贮罐清洗设备,尤其涉及一种大型贮罐磁吸附机器人入罐装置及方法。
背景技术:
1、放射性贮罐内部残留的放射性物质会使得贮罐放射性水平较高,无法满足退役拆除的要求,因此在放射性贮罐退役阶段需要对贮罐进行清洗去污。针对碳钢材质的贮罐,磁吸附机器人携带高压水对贮罐进行清洗去污是一种高效方案,因此,磁吸附机器人如何从贮罐外部到贮罐内部顶部、侧壁以及底部则是关键技术。
技术实现思路
1、本发明的目的是要提供一种大型贮罐磁吸附机器人入罐装置及方法。
2、为达到上述目的,本发明是按照以下技术方案实施的:
3、本发明一种大型贮罐磁吸附机器人入罐装置包括装置机架、第一卷扬机、机器人升降翻转机构、磁吸附清洁机器人和第二卷扬机,大型储罐的上端设置有储罐入口和辅助牵引孔,所述装置机架位于所述储罐入口的上方,所述第二卷扬机位于所述辅助牵引孔的上方,所述第一卷扬机设置于所述装置机架的上段,所述机器人升降翻转机构设置于所述装置机架的下段,所述机器人升降翻转机构的驱动端与所述磁吸附清洁机器人通过磁吸可拆卸连接,所述第一卷扬机的牵引绳与所述磁吸附清洁机器人扣接连接。
4、进一步,所述机器人升降翻转机构包括升降伺服电机、升降传动链条、升降装置、翻转驱动液压杆、翻转托盘、升降轨道,所述升降轨道固定设置于所述装置机架的一侧,所述升降伺服电机与所述装置机架的上端固定连接,所述升降装置与所述升降轨道滑动连接,所述升降伺服电机通过升降传动链条与所述升降装置传动连接,所述翻转托盘的一端与所述升降装置的一侧转动连接,所述翻转驱动液压杆的两端分别与所述翻转托盘的上端和所述升降装置之间转动连接,所述翻转托盘的下端面与所述磁吸附清洁机器人通过磁吸可拆卸连接。
5、优选的,所述装置机架的下端设置有移动轮,所述移动轮为四个,四个所述移动轮分别固定设置于所述装置机架的下端四角。
6、具体地,所述磁吸附清洁机器人包括清洗机械手、机器人移动轮、机器人负压清洗装置、机器人磁吸组件,所述机器人磁吸组件的四角分别设置一个所述机器人移动轮,所述机器人负压清洗装置设置于所述机器人磁吸组件的下端,所述清洗机械手设置于所述机器人磁吸组件的上端。
7、本发明的大型贮罐磁吸附机器人入罐装置的入罐方法包括以下步骤:
8、s1:通过第一卷扬机将磁吸附清洁机器人从大型储罐的储罐入口位置放入大型储罐内的底部,由磁吸附清洁机器人清洗大型储罐内的底部;
9、s2:通过第二卷扬机从大型储罐上的辅助牵引孔放入牵引绳,磁吸附清洁机器人与第二卷扬机的牵引绳连接;
10、s3:而后通过第二卷扬机将磁吸附清洁机器人牵引,使用磁吸附清洁机器人吸附至大型储罐内壁进行内壁清洗;
11、s4:最后第二卷扬机与磁吸附清洁机器人断开连接,第一卷扬机将磁吸附清洁机器人从储罐入口的位置离开大型储罐完成清洗。
12、本发明的有益效果是:
13、本发明是一种大型贮罐磁吸附机器人入罐装置及方法,与现有技术相比,本发明可以顺利将机器人从罐外送至罐内顶部、底部以及侧壁,结构简单、操作方便,且具有防坠落功能,确保机器人在异常情况下不会发生坠落受损的情况,为机器人携带高压水开展放射性贮罐清洗去污工作奠定了基础。
技术特征:
1.一种大型贮罐磁吸附机器人入罐装置,其特征在于:包括装置机架(9)、第一卷扬机(1)、机器人升降翻转机构、磁吸附清洁机器人(8)和第二卷扬机(10),大型储罐(12)的上端设置有储罐入口(13)和辅助牵引孔(14),所述装置机架(9)位于所述储罐入口(13)的上方,所述第二卷扬机(10)位于所述辅助牵引孔(14)的上方,所述第一卷扬机(1)设置于所述装置机架(9)的上段,所述机器人升降翻转机构设置于所述装置机架(9)的下段,所述机器人升降翻转机构的驱动端与所述磁吸附清洁机器人(8)通过磁吸可拆卸连接,所述第一卷扬机(1)的牵引绳与所述磁吸附清洁机器人(8)扣接连接。
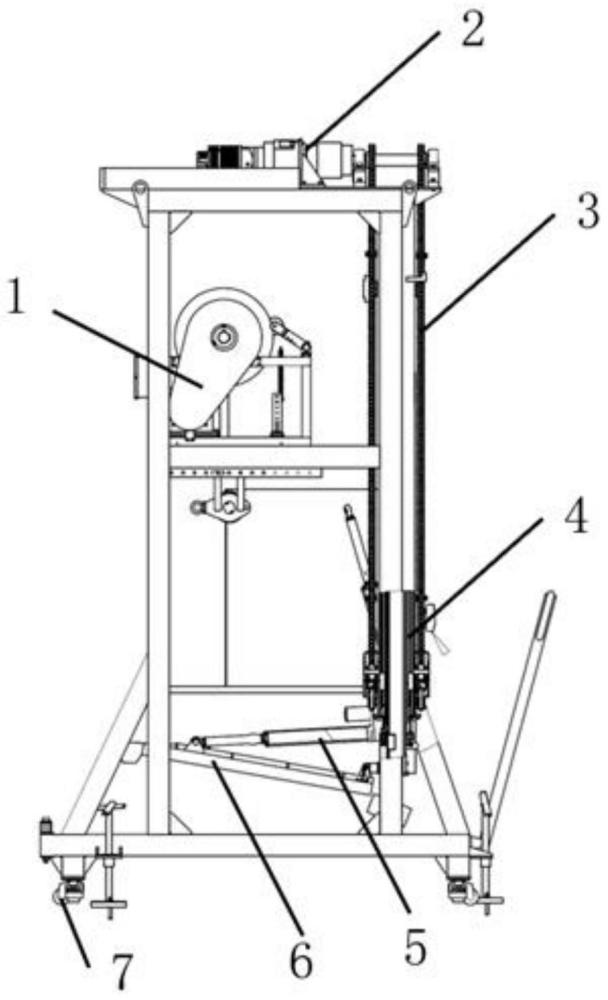
2.根据权利要求1所述的大型贮罐磁吸附机器人入罐装置,其特征在于:所述机器人升降翻转机构包括升降伺服电机(2)、升降传动链条(3)、升降装置(4)、翻转驱动液压杆(5)、翻转托盘(6)、升降轨道(11),所述升降轨道(11)固定设置于所述装置机架(9)的一侧,所述升降伺服电机(2)与所述装置机架(9)的上端固定连接,所述升降装置(4)与所述升降轨道(11)滑动连接,所述升降伺服电机(2)通过升降传动链条(3)与所述升降装置(4)传动连接,所述翻转托盘(6)的一端与所述升降装置(4)的一侧转动连接,所述翻转驱动液压杆(5)的两端分别与所述翻转托盘(6)的上端和所述升降装置(4)之间转动连接,所述翻转托盘(6)的下端面与所述磁吸附清洁机器人(8)通过磁吸可拆卸连接。
3.根据权利要求2所述的大型贮罐磁吸附机器人入罐装置,其特征在于:所述装置机架(9)的下端设置有移动轮(7),所述移动轮(7)为四个,四个所述移动轮(7)分别固定设置于所述装置机架(9)的下端四角。
4.根据权利要求2所述的大型贮罐磁吸附机器人入罐装置,其特征在于:所述磁吸附清洁机器人(8)包括清洗机械手(15)、机器人移动轮(16)、机器人负压清洗装置(17)、机器人磁吸组件(18),所述机器人磁吸组件(18)的四角分别设置一个所述机器人移动轮(16),所述机器人负压清洗装置(17)设置于所述机器人磁吸组件(18)的下端,所述清洗机械手(15)设置于所述机器人磁吸组件(18)的上端。
5.一种如权利要求4所述的大型贮罐磁吸附机器人入罐装置的入罐方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种大型贮罐磁吸附机器人入罐装置及方法,包括装置机架、第一卷扬机、机器人升降翻转机构、磁吸附清洁机器人和第二卷扬机,大型储罐的上端设置有储罐入口和辅助牵引孔,装置机架位于储罐入口的上方,第二卷扬机位于辅助牵引孔的上方,第一卷扬机设置于装置机架的上段,机器人升降翻转机构设置于装置机架的下段,机器人升降翻转机构的驱动端与磁吸附清洁机器人通过磁吸可拆卸连接,第一卷扬机的牵引绳与磁吸附清洁机器人扣接连接。能够顺利将机器人从罐外送至罐内底部以及侧壁,结构简单、操作方便,且具有防坠落功能,确保机器人在异常情况下不会发生坠落受损的情况,为机器人携带高压水开展放射性贮罐清洗去污工作奠定了基础。
技术研发人员:李飞,安田鑫,邓波,樊浩,母坤霖,代光明,杨亮,江周阳,王炳志,王刚,马舞
受保护的技术使用者:中核四川环保工程有限责任公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!