一种多自由度载人高空作业平台的制作方法
本发明涉及一种高空作业平台,具体涉及一种固体火箭发动机静力试验多自由度高空作业平台。
背景技术:
1、固体火箭发动机燃烧室壳体静力试验存在大量的高处作业情况,主要归因于长度较大的壳体立式开展静力试验时,需要在壳体上端和侧向完成大量的工装安装、调整任务,大量操作需要在2米以上高度进行。而静力试验工位紧凑,布设设备、线缆繁多,难以通过搭设平台等方式为人员在高处作业提供支持,且人员通常需要在某一特定位置完成长时间作业。因此,需要手动攀爬至该位置后,只能依靠自身固定,并采用安全带防护,附着空间狭小,仅依靠安全带等防护措施,人员操作过程难以做到解放双手,长时间作业极易产生疲劳和注意力下降现象。
2、目前采用的解决方案,主要集中于两类:一类是采用地面展开支撑后,通过类似机械臂的装置将操作人员移动至指定位置。此类装置需要较大且平整的地面支撑部分才能充分展开,才能保证平台工作的安全可靠,对于空间狭小的场地,此类装置无法充分展开,则不能正常使用;且升降车只能固定于一个工位作业,需要更换位置作业时,需要将操作人员降至地面,人员下车后将升降车移动至下一工位,人员再上车作业,每个试验需要频繁更换升降车位置,才能满足试验安装需求;
3、另一类则是通过顶部与其他设施连接固定后,将小车降至指定高度进行作业。此类装置需要在建筑等设施顶部有牢固的固定点,将其固定方可进行作业,且由于顶端固定,在至少两个方向移动受限,使其可操作空间不足。
技术实现思路
1、本发明提供一种多自由度载人高空作业平台,用以解决静力试验过程中,由于工位紧凑、布设设备、线缆繁多情况下,很多作业工位难以使用现有升降车到达,并且升降车频繁移动,效率低下,其他人员难以配合的技术问题;
2、进而解决高空作业过程中,由于作业空间狭小、作业时间较长进而导致高空作业难度大、安全性差、工作效率低的技术问题。
3、为了实现上述目的,本发明通过以下技术方案来解决上述技术问题:
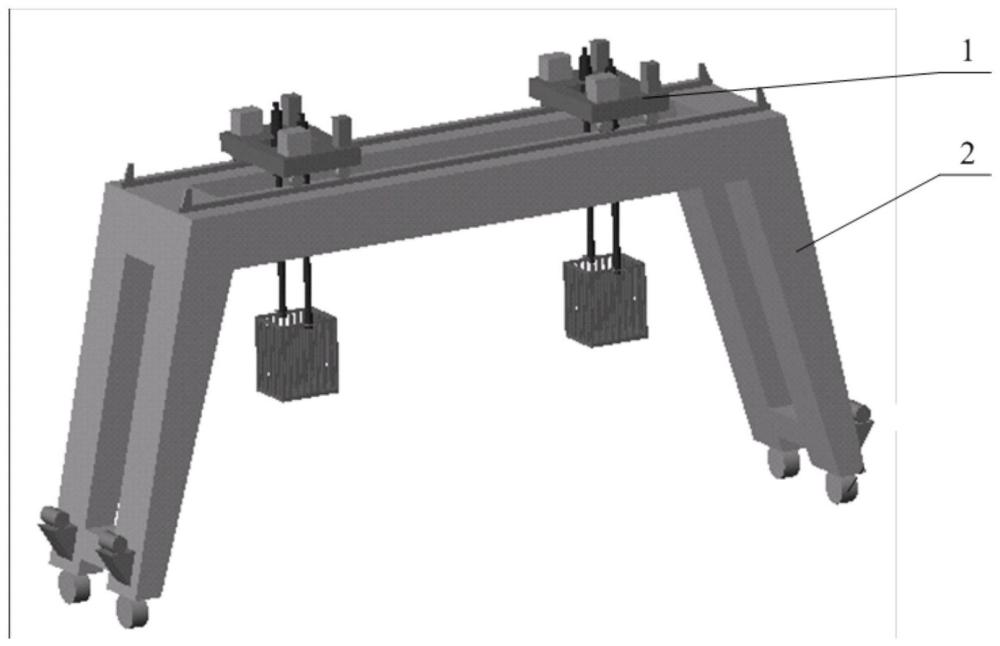
4、一种多自由度载人高空作业平台,包括:至少一组吊篮小车1和主框架装置2,所述吊篮小车1,包括运动电机101、伺服油缸控制器102、小车框架103、小车运动轮104、伺服油缸105和吊篮106;
5、所述主框架装置2,包括横梁201及两端分别对称设置的两组支撑梁202形成龙门吊的形式,每一组支撑梁202的底部设置有一组主框架运动轮203;
6、所述吊篮小车1和主框架装置2通过横梁201上表面设置的小车运动轨道204滑动连接。
7、所述横梁201顶部设置有两条平行的小车运动轨道204。
8、所述每条小车运动轨道204两端分别设置有限位装置205,限制吊篮小车1在小车运动轨道204内往复水平运动。
9、所述主框架运动轮203嵌合于地面铺设的运动轨道中,主框架装置2沿着运动轨道水平方向自由移动和停止。
10、所述小车框架103是吊篮小车1的主体框架,小车框架103的上端面设置有至少两组小车运动电机101和伺服油缸控制器102。
11、所述吊篮小车1的下端面安装有至少四组小车运动轮104,嵌合于横梁201上表面的小车运动轨道204中。
12、所述吊篮小车103平行安装有两组伺服油缸105及与之配套的伺服油缸控制器102。
13、所述两组伺服油缸105底部安装有吊篮106。
14、所述小车运动轨道204与地面铺设的运动轨道互相垂直设置,所述吊篮小车1与主框架装置2的运动方向相互垂直。
15、所述伺服油缸控制器102控制吊篮106上下运动。
16、基于上述技术方案的实施,本发明能够获得如下的技术效果:
17、1、本发明提供一种多自由度高空作业平台,可以实现在静力试验过程中,由于工位紧凑,布设设备、线缆繁多情况下,仍可以上下、左右、前后六自由度灵活移动,方便、灵活、安全的将操作人员移送至任意位置。同时,采用手持遥控的方式,可通过作业人员自主动作,实现自由移动至需要高处作业位置的功能。
18、2、本发明提供一种多自由度高空作业平台,采用龙门吊的基本形式搭建框架,主框架装置2可沿地面轨道匀速稳定运动,配合电机提供动力,实现作业平台可水平方向四自由度运动。
19、3、本发明提供一种多自由度高空作业平台,设置吊篮小车3可以实现作业装置,利用双伺服油缸105同步控制吊篮106上下运动,实现高度方向的两自由度运动,实现吊篮小车1停驻、高度的自由、稳定、可靠调整,进而降低高空作业难度、提高安全性,提升作业效率。
技术特征:
1.一种多自由度载人高空作业平台,包括:至少一组吊篮小车(1)和主框架装置(2),其特征在于,
2.根据权利要求1所述多自由度载人高空作业平台,其特征在于,所述横梁(201)顶部设置有两条平行的小车运动轨道(204)。
3.根据权利要求2所述多自由度载人高空作业平台,其特征在于,所述每条小车运动轨道(204)两端分别设置有限位装置(205),限制吊篮小车(1)在小车运动轨道(204)内往复水平运动。
4.根据权利要求3所述多自由度载人高空作业平台,其特征在于,所述主框架运动轮(203)嵌合于地面铺设的运动轨道中,主框架装置(2)沿着运动轨道水平方向自由移动和停止。
5.根据权利要求4所述多自由度载人高空作业平台,其特征在于,所述小车框架(103)是吊篮小车(1)的主体框架,小车框架(103)的上端面设置有至少两组小车运动电机(101)和伺服油缸控制器(102)。
6.根据权利要求5所述多自由度载人高空作业平台,其特征在于,所述吊篮小车(1)的下端面安装有至少四组小车运动轮(104),嵌合于横梁(201)上表面的小车运动轨道(204)中。
7.根据权利要求6所述多自由度载人高空作业平台,其特征在于,所述吊篮小车(103)平行安装有两组伺服油缸(105)及与之配套的伺服油缸控制器(102)。
8.根据权利要求7所述多自由度载人高空作业平台,其特征在于,所述两组伺服油缸(105)底部安装有吊篮(106)。
9.根据权利要求8所述多自由度载人高空作业平台,其特征在于,所述小车运动轨道(204)与地面铺设的运动轨道互相垂直设置,所述吊篮小车(1)与主框架装置(2)的运动方向相互垂直。
10.根据权利要求9所述多自由度载人高空作业平台,其特征在于,所述伺服油缸控制器(102)控制吊篮(106)上下运动。
技术总结
本发明涉及一种高空作业平台,具体涉及一种固体火箭发动机静力试验用多自由度高空作业平台。本发明提供一种多自由度高空作业平台,包括:吊篮小车和主框架装置,所述吊篮小车包括运动电机、伺服油缸控制器、小车框架、小车运动轮、伺服油缸和吊篮;所述主框架装置,包括横梁及两端分别对称设置的两组支撑梁形成龙门吊的形式,每一组支撑梁的底部设置有一组主框架运动轮;所述吊篮小车和主框架装置通过横梁上表面设置的小车运动轨道滑动连接。本发明可以实现静力试验过程中,将操作人员灵活的送到操作工位,又能够最大限度的保障操作人员的安全,降低操作人员的体力消耗,进而提高工作效率。
技术研发人员:高翔,马海波,云杰,孙艳涛,张磊,任明明
受保护的技术使用者:内蒙航天动力机械测试所
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!