摆角反馈方法、装置、起重机以及存储介质与流程
本发明涉及起重机控制,具体而言,涉及一种摆角反馈方法、装置、起重机以及存储介质。
背景技术:
1、桥式起重机(或称行车)是一种重要的通用机械设备。作为大负载的通用物流设备,在绝大部分的工厂车间都会用到各类行车起重机,如矿业,钢铁行车,有色金属行车,机械加工制造业等。
2、桥式起重机的安全是非常重要的,尤其涉及到人身安全。目前,桥式起重机在发现安全问题的时候,都采用的是机械抱闸急停的方式。但是,由于桥式起重机采用钢丝绳挂吊具的结构,急停之后,吊具仍会向前急冲非常长的距离,对前面物品或人仍可能产生伤害。同时,吊具会产生极大的摆角,可能对桥式起重机产生硬件伤害。现有的基于视觉的摆角反馈方式受相机频率的限制,一般仅有30hz左右,使得在急停控制中无法让桥式起重机的控制器更快的进行危险工况的判断。
技术实现思路
1、为了克服相机频率的限制,在急停控制中让桥式起重机的控制器更快的进行危险工况的判断,提供了一种摆角反馈方法、装置、起重机和计算机可读存储介质。
2、本发明的技术方案可以这样实现:
3、第一方面,本发明提供一种摆角反馈方法,应用于起重机的控制器,所述起重机还包括吊具,所述方法包括:
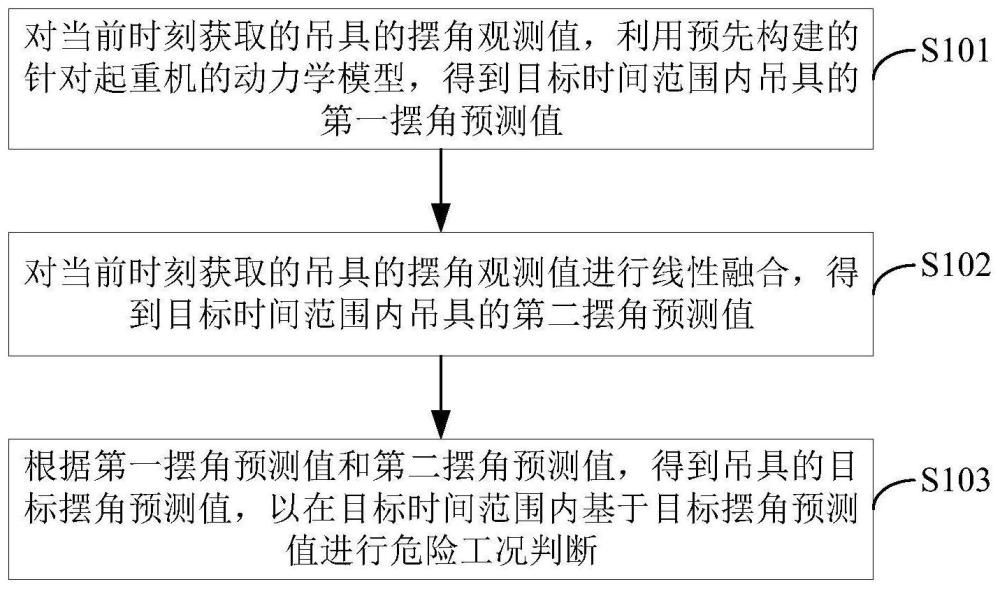
4、对当前时刻获取的所述吊具的摆角观测值,利用预先构建的针对所述起重机的动力学模型,得到目标时间范围内所述吊具的第一摆角预测值,所述目标时间范围为从当前时刻至下一摆角观测值的获取时刻的时间范围;
5、对当前时刻获取的所述吊具的摆角观测值进行线性融合,得到所述目标时间范围内所述吊具的第二摆角预测值;
6、根据所述第一摆角预测值和所述第二摆角预测值,得到所述吊具的目标摆角预测值,以在所述目标时间范围内基于所述目标摆角预测值进行危险工况判断。
7、可选地,在所述对当前时刻获取的所述吊具的摆角观测值,利用预先构建的针对所述起重机的动力学模型,得到目标时间范围内所述吊具的第一摆角预测值之前,所述方法还包括:
8、利用所述起重机的多组阶越响应测试数据,确定所述起重机的实际质量以及所述起重机的实际起升高度;
9、根据所述起重机的实际质量以及所述起重机的实际起升高度,构建所述动力学模型。
10、可选地,所述利用所述起重机的多组阶越响应测试数据,确定所述起重机的实际质量以及所述起重机的实际起升高度的步骤包括:
11、利用所述多组阶越响应测试数据的最小二乘误差、所述起重机的质量名义值以及所述起重机的起升高度名义值,得到针对所述起重机的偏差函数;
12、对所述偏差函数进行非线性优化,得到所述起重机的实际质量以及所述起重机的实际起升高度。
13、可选地,所述对当前时刻获取的所述吊具的摆角观测值进行线性融合,得到所述目标时间范围内所述吊具的第二摆角预测值的步骤包括:
14、对当前时刻获取的所述吊具的摆角观测值,利用预先拟合的摆角观测值线性关系,按照预设采样时间和预设预测频率生成所述目标时间范围内所述吊具的第二摆角预测值。
15、可选地,所述根据所述第一摆角预测值和所述第二摆角预测值,得到所述吊具的目标摆角预测值的步骤包括:
16、构建所述第一摆角预测值的动力学误差模型和所述第二摆角预测值的动力学误差模型;
17、根据所述第一摆角预测值的动力学误差模型,得到第一正态分布,所述第一正态分布为所述第一摆角预测值的误差服从的正态分布;
18、根据所述第二摆角预测值的动力学误差模型,得到第二正态分布,所述第二正态分布为所述第二摆角预测值的误差服从的正态分布;
19、根据所述第一正态分布和所述第二正态分布,对所述第一摆角预测值和所述第二摆角预测值进行融合,得到所述目标摆角预测值。
20、可选地,所述根据所述第一正态分布和所述第二正态分布,对所述第一摆角预测值和所述第二摆角预测值进行融合,得到所述目标摆角预测值的步骤包括:
21、根据所述第一正态分布的方差和所述第二正态分布的方差,得到融合参数;
22、利用所述融合参数对所述第一摆角预测值和所述第二摆角预测值进行融合,得到所述目标摆角预测值。
23、可选地,所述利用所述融合参数对所述第一摆角预测值和所述第二摆角预测值进行融合,得到所述目标摆角预测值的步骤包括:
24、利用所述第二摆角预测值、所述第一摆角预测值以及所述融合参数,得到摆角预测增益;
25、将所述第一摆角预测值与所述摆角预测增益的和值作为所述目标摆角预测值。
26、第二方面,本发明提供一种摆角反馈装置,应用于起重机的控制器,所述起重机还包括吊具,所述装置包括:
27、第一预测模块,用于对当前时刻获取的所述吊具的摆角观测值,利用预先构建的针对所述起重机的动力学模型,得到目标时间范围内所述吊具的第一摆角预测值,所述目标时间范围为从当前时刻至下一摆角观测值的获取时刻的时间范围;
28、第二预测模块,用于对当前时刻获取的所述吊具的摆角观测值进行线性融合,得到所述目标时间范围内所述吊具的第二摆角预测值;
29、处理模块,用于根据所述第一摆角预测值和所述第二摆角预测值,得到所述吊具的目标摆角预测值,以在所述目标时间范围内基于所述目标摆角预测值进行危险工况判断。
30、第三方面,本发明提供一种起重机,其包括吊具和控制器,所述控制器烧录有计算机程序,所述计算机程序被执行时实现如前述第一方面所述的摆角反馈方法。
31、第四方面,本发明提供一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现如前述第一方面所述的摆角反馈方法。
32、本发明公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本发明公开的上述技术即可得知。
33、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种摆角反馈方法,其特征在于,应用于起重机的控制器,所述起重机还包括吊具,所述方法包括:
2.如权利要求1所述的方法,其特征在于,在所述对当前时刻获取的所述吊具的摆角观测值,利用预先构建的针对所述起重机的动力学模型,得到目标时间范围内所述吊具的第一摆角预测值之前,所述方法还包括:
3.如权利要求2所述的方法,其特征在于,所述利用所述起重机的多组阶越响应测试数据,确定所述起重机的实际质量以及所述起重机的实际起升高度的步骤包括:
4.如权利要求1所述的方法,其特征在于,所述对当前时刻获取的所述吊具的摆角观测值进行线性融合,得到所述目标时间范围内所述吊具的第二摆角预测值的步骤包括:
5.如权利要求1所述的方法,其特征在于,所述根据所述第一摆角预测值和所述第二摆角预测值,得到所述吊具的目标摆角预测值的步骤包括:
6.如权利要求5所述的方法,其特征在于,所述根据所述第一正态分布和所述第二正态分布,对所述第一摆角预测值和所述第二摆角预测值进行融合,得到所述目标摆角预测值的步骤包括:
7.如权利要求6所述的方法,其特征在于,所述利用所述融合参数对所述第一摆角预测值和所述第二摆角预测值进行融合,得到所述目标摆角预测值的步骤包括:
8.一种摆角反馈装置,其特征在于,应用于起重机的控制器,所述起重机还包括吊具,所述装置包括:
9.一种起重机,其特征在于,其包括吊具和控制器,所述控制器烧录有计算机程序,所述计算机程序被执行时实现如权利要求1-7任一项所述的摆角反馈方法。
10.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述的摆角反馈方法。
技术总结
本发明提供的一种摆角反馈方法、装置、起重机以及存储介质,涉及起重机控制技术领域。该方法:起重机的控制器对当前时刻获取的吊具的摆角观测值,利用预先构建的针对起重机的动力学模型,得到目标时间范围内吊具的第一摆角预测值,目标时间范围为从当前时刻至下一摆角观测值的获取时刻的时间范围;对当前时刻获取的吊具的摆角观测值进行线性融合,得到目标时间范围内吊具的第二摆角预测值;根据第一摆角预测值和第二摆角预测值,得到吊具的目标摆角预测值,以在目标时间范围内基于目标摆角预测值进行危险工况判断,从而克服相机频率的限制,在急停控制中让桥式起重机的控制器更快的进行危险工况的判断。
技术研发人员:杨庆研,郑军
受保护的技术使用者:聚时科技(上海)有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!