一种包装机辅料的供料系统的制作方法
本申请涉及供料系统的,具体地,涉及一种包装机辅料的供料系统。
背景技术:
1、在烟草生产过程中,烟包的商标纸及铝纸均采用卷盘的形式进行供应,卷盘的直径约为45~59cm,重量约为28~35kg。现有技术中,供料方式主要有两种:第一种,采用agv小车将整托盘的卷盘分别运输至每个机组处,然后由人工进行上料;第二种,采用agv小车将整托盘的卷盘运输至机组处,然后在每个机组处增加卷盘拆卸机器人或拆卸设备进行上料。还有,在agv小车上增加协作机器人,将整托盘的卷盘运输至每个机组处,然后采用协作机器人进行拆卸并上料的研发方向。但是,对于第一种供料方式,托盘运输过程虽然不需要人工干预,但agv小车到达机组后,仍旧需要人工操作,由于辅料卷盘的重量较大、劳动强度高,容易造成操作人员的劳动损伤;对于第二种供料方式,每个机组都增加拆卸机器人或拆卸设备,投资较大、占地面积大;对于在agv小车上增加协作机器人的方案,目前载重量大的机器人一般体积较大,如果将其安装在agv底盘上,将会导致agv底盘较大,在复杂的生产环境中应用较为困难,而能够在agv上的小型协作机器人往往载重量不足,无法抓取托盘上的辅料卷盘进行上料。
技术实现思路
1、为解决上述问题的至少一个方面,本实用新型提供了一种包装机辅料的供料系统,包括用于拆装的机器人、至少一个输送机、agv小车和控制器;输送机包括依次设置的放置段、存储段、待取段,和与之对应设置的用于传送的第一驱动机构、第二驱动机构、第三驱动机构,放置段设置在靠近机器人的一端;存储段靠近放置段的一端设置第一光电开关,用于检测存储段内卷盘的存储情况;待取段远离存储段的一端设置第二光电开关,用于检测待取段内卷盘的存储情况;agv小车包括小车本体和水平设置的杆式货叉,杆式货叉横截面的尺寸和形状与卷盘中心孔的尺寸和形状相匹配,杆式货叉固定连接在小车本体上的升降机构上;控制器与机器人、第一驱动机构、第二驱动机构、第三驱动机构、第一光电开关、第二光电开关和agv小车均电连接或通讯连接,控制器基于接收每个机组的需求信号控制机器人、输送机和agv小车的启动或关闭,基于第一光电开关的信号控制机器人、第一驱动机构和第二驱动机构的开启或关闭,基于第二光电开关的信号控制第二驱动机构、第三驱动机构和agv小车的启动或关闭。
2、通过上述技术方案,机器人将托盘上的卷盘拆卸下来并堆垛至放置段,控制器控制第一驱动机构和第二驱动机构运转,将放置段上的卷盘传送至存储段,重复进行,直至第一光电开关被连续触发,表明存储段内卷盘放满,发送信号至控制器,控制器控制第一驱动机构和第二驱动机构关闭;控制器控制第二驱动机构和第三驱动机构运转,将存储段上的卷盘整体向待取段传送,直至第二光电开关被触发,表明待取段内卷盘放满,发送信号至控制器,控制器控制第二驱动机构和第三驱动机构关闭;当机组有辅料需求时会发送信号至控制器中,控制器控制agv小车行走至靠近待取段,利用杆式货叉同时穿设在待取段内的多个卷盘内,并行走至有需求的机组处完成卸货。本申请实现了供料工序的自动化,有助于降低操作人员的劳动强度;本申请的供料系统采用机器人将托盘上的卷盘拆卸并重新堆垛至输送机中,再利用agv小车将一定数量的卷盘送至机组,响应速度快,有助于提高工作效率;本申请仅需一台机器人进行拆装,对现有的输送机、agv小车进行简单改进就可实现,制造成本低、占地面积小。
3、优选地,所述存储段和待取段之间设置有挡板,挡板上连接有用于驱动挡板升降的第四驱动机构,第四驱动机构与控制器电连接,控制器基于接收到的第二光电开关的信号控制第四驱动机构运行。通过上述技术方案,当第二光电开关被触发,发送信号至控制器中,控制器控制第四驱动机构运转,使得挡板升起,阻止存储段内的卷盘继续向待取段内传送,反之,控制器没有接收到第二光电开关的信号时,通过控制第四驱动机构使挡板下降,实现存储段向待取段传送卷盘。
4、优选地,所述杆式货叉上固定连接有第一卡爪,第一卡爪与小车本体的控制机构电连接,第一卡爪用于与卷盘卡接。通过上述技术方案,设置第一卡爪,有助于agv小车拾取卷盘更稳固。
5、优选地,所述第一卡爪设置有多个,多个第一卡爪沿着杆式货叉的延伸方向分布。通过上述技术方案,设置多个第一卡爪,两个第一卡爪之间穿设多个卷盘,实现agv小车一次行径过程中,同时为多个机组供料。
6、优选地,还包括至少一个托盘存储站台,托盘存储站台固定连接在机器人的工作区域内,方便了机器人拆卸托盘中的卷盘。
7、优选地,所述输送机设置有多个,多个输送机均固定设置在机器人的工作区域内。通过上述技术方案,机器人可实现对不同种类卷盘的拆卸,设置多个输送机,每个输送机可放置不同种类的辅料卷盘,本申请的供料系统实现为不同类型的包装机供料。
8、优选地,所述存储段上固定连接有防护罩,防护罩覆盖在存储段的上方。
9、优选地,所述输送机为v型槽式输送机。
10、优选地,所述机器人的抓取机构上固定连接有第二卡爪,第二卡爪与机器人的控制机构电连接,第二卡爪用于与卷盘卡接,有助于提高机器人拾取卷盘的稳固性。
11、优选地,所述机器人上连接有用于识别卷盘位置的相机,相机与机器人的控制机构电连接,相机固定连接在第二卡爪附近,便于机器人准确识别卷盘的位置。
12、本实用新型的一种包装机辅料的供料系统,具有以下有益效果:
13、本申请利用机器人将托盘存储站台上的卷盘从托盘中拆卸下来重新堆垛至输送机的放置段,控制器根据第一光电开关和第二光电开关的信号,控制第一驱动机构、第二驱动机构和第三驱动机构的运转或关闭,实现卷盘传送至待取段,agv小车通过杆式货叉同时穿设在待取段中的多个卷盘中并送至机组处,实现辅料卷盘的自动化供料,有助于降低操作人员的劳动强度;本申请仅需要一台机器人就可实现对不同种类卷盘的拆卸,通过在杆式货叉上设置多个第一卡爪,以及设置多个输送机,可实现为多个包装机同时供料以及为不同类型的包装机进行供料,有助于减小占地面积。
技术特征:
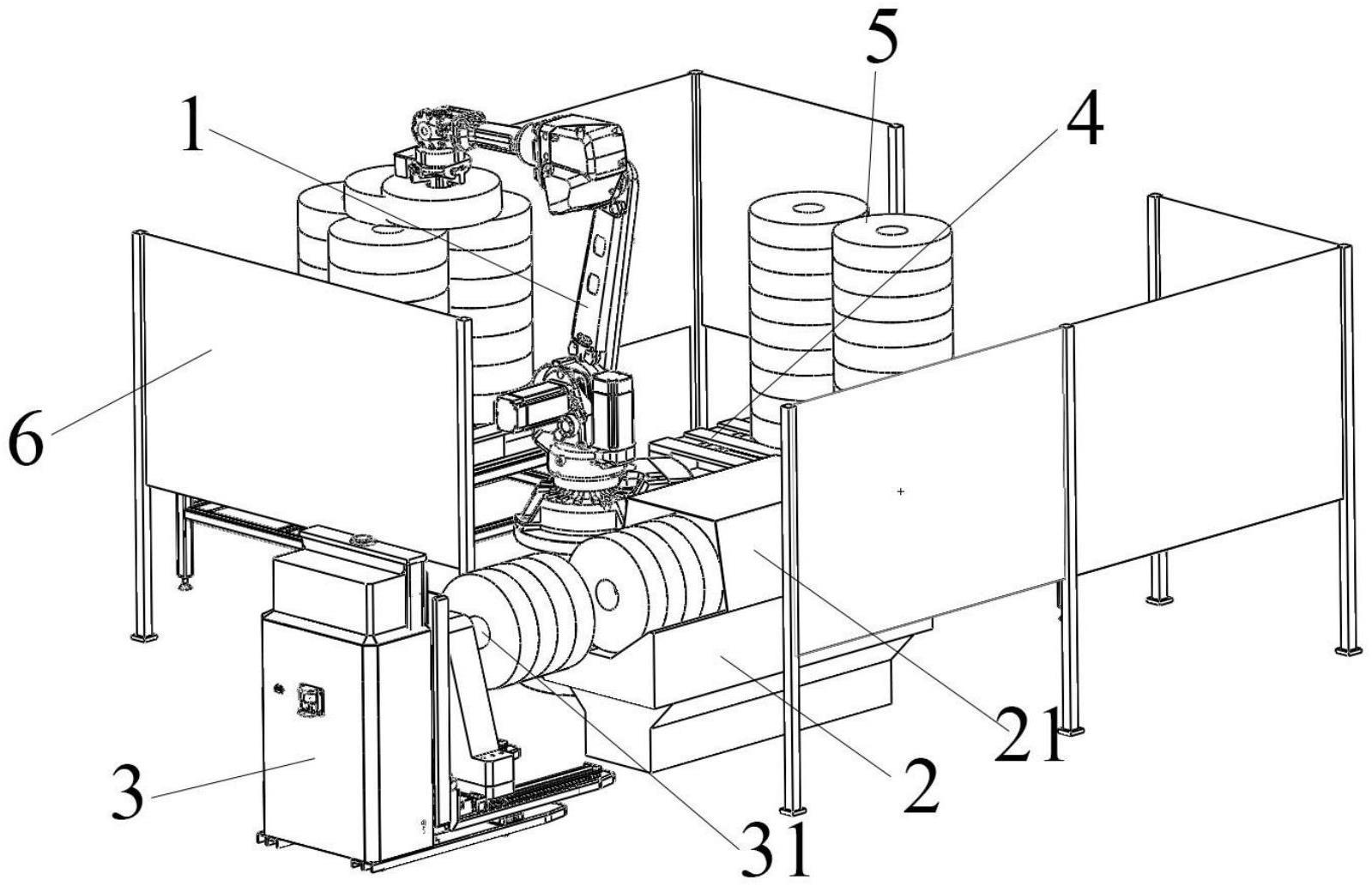
1.一种包装机辅料的供料系统,包括用于拆装的机器人(1),其特征在于:还包括至少一个输送机(2)、agv小车(3)和控制器;
2.根据权利要求1所述的一种包装机辅料的供料系统,其特征在于:所述存储段和待取段之间设置有挡板,挡板上连接有用于驱动挡板升降的第四驱动机构,第四驱动机构与控制器电连接,控制器基于接收到的第二光电开关的信号控制第四驱动机构运行。
3.根据权利要求1所述的一种包装机辅料的供料系统,其特征在于:所述杆式货叉(31)上固定连接有第一卡爪,第一卡爪与小车本体的控制机构电连接,第一卡爪用于与卷盘(5)卡接。
4.根据权利要求3所述的一种包装机辅料的供料系统,其特征在于:所述第一卡爪设置有多个,多个第一卡爪沿着杆式货叉(31)的延伸方向分布。
5.根据权利要求1所述的一种包装机辅料的供料系统,其特征在于:还包括至少一个托盘存储站台(4),托盘存储站台(4)固定连接在机器人(1)的工作区域内。
6.根据权利要求1所述的一种包装机辅料的供料系统,其特征在于:所述输送机(2)设置有多个,多个输送机(2)均固定设置在机器人(1)的工作区域内。
7.根据权利要求1所述的一种包装机辅料的供料系统,其特征在于:所述存储段上固定连接有防护罩(21),防护罩(21)覆盖在存储段的上方。
8.根据权利要求1所述的一种包装机辅料的供料系统,其特征在于:所述输送机(2)为v型槽式输送机。
9.根据权利要求1所述的一种包装机辅料的供料系统,其特征在于:所述机器人(1)的抓取机构上固定连接有第二卡爪,第二卡爪与机器人(1)的控制机构电连接,第二卡爪用于与卷盘(5)卡接。
10.根据权利要求9所述的一种包装机辅料的供料系统,其特征在于:所述机器人(1)上连接有用于识别卷盘(5)位置的相机,相机与机器人(1)的控制机构电连接,相机固定连接在第二卡爪附近。
技术总结
本技术公开一种包装机辅料的供料系统,包括机器人、输送机、AGV小车和控制器;输送机包括依次设置的放置段、存储段、待取段,和与之对应设置的用于传送的第一驱动机构、第二驱动机构、第三驱动机构;存储段靠近放置段的一端设置第一光电开关,待取段远离存储段的一端设置第二光电开关;AGV小车包括小车本体和水平设置的杆式货叉,杆式货叉横截面的尺寸和形状与卷盘中心孔的尺寸和形状相匹配,杆式货叉固定连接在小车本体上的升降机构上;控制器与机器人、第一驱动机构、第二驱动机构、第三驱动机构、第一光电开关、第二光电开关和AGV小车均电连接或通讯连接。本申请的供料系统制造成本低、占地面积小、工作效率高,实现了供料工序的自动化。
技术研发人员:吕祺,张天垚,周勇,马晓伟,肖树铭,马奎,马正,高从文,公孙萧雄
受保护的技术使用者:红塔烟草(集团)有限责任公司
技术研发日:20230217
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!