堆高式无人叉车的制作方法
本技术涉及搬运工具,特别涉及一种堆高式无人叉车。
背景技术:
1、随着越来越多的企业使用无人叉车取代人工搬运,提高叉车的安全性能迫在眉睫,现有的叉车通常加装了各类安全传感器,通过安全传感器反馈的信息作为安全行驶的决策依据,但目前关于无人叉车的安全保护方案较少,现有方案对叉车的保护范围不够全面,存在安全隐患。
技术实现思路
1、本实用新型的主要目的是提供一种堆高式无人叉车,旨在感应无人叉车工作时运动轨迹上的障碍物和叉臂工作时运动轨迹上的障碍物,以减少无人叉车的安全隐患。
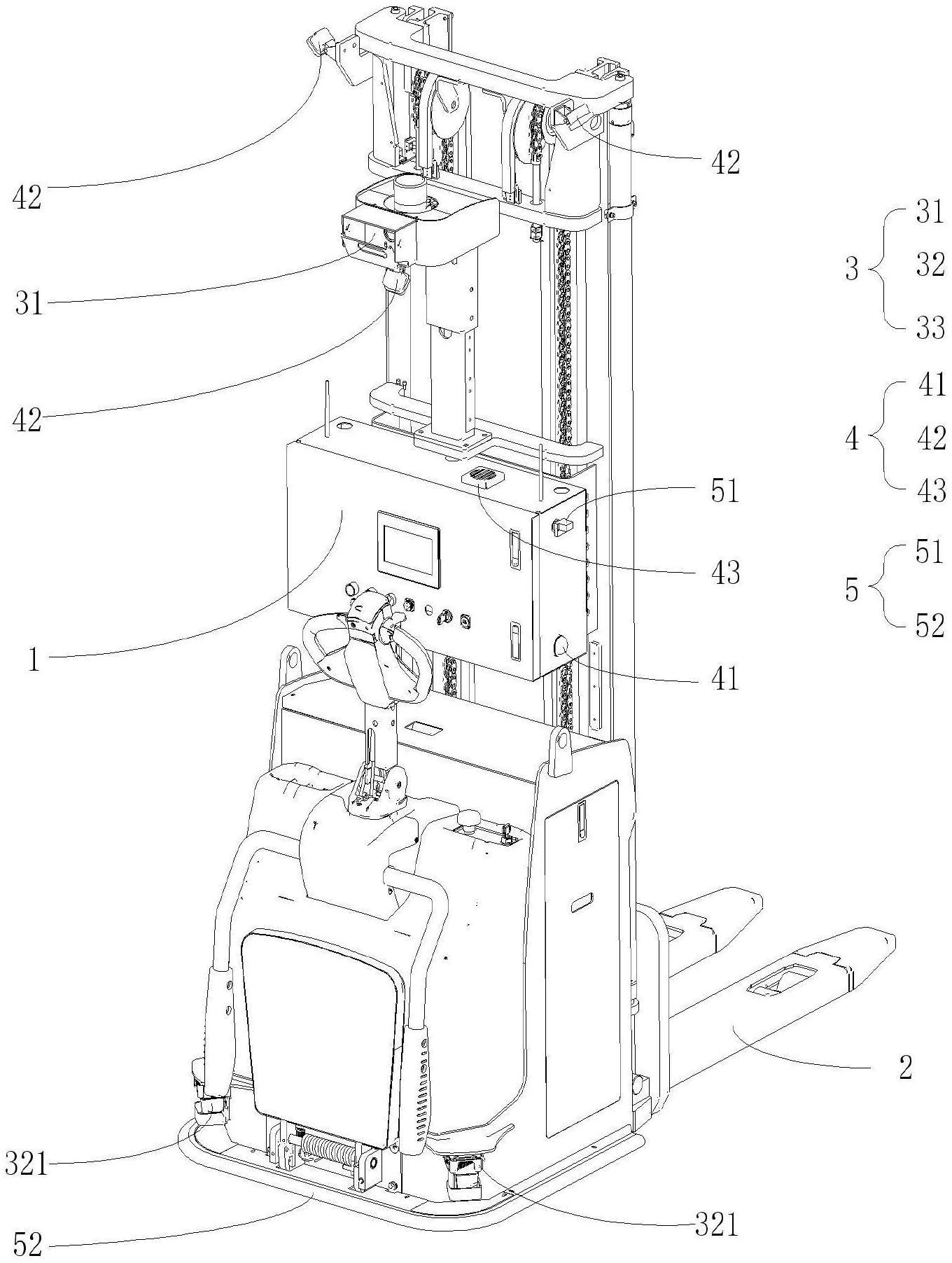
2、为实现上述目的,本实用新型提出的堆高式无人叉车,包括车体、叉臂以及主动防护机构,所述叉臂上下方向活动安装于所述车体,所述主动防护机构包括:
3、避障相机,固定安装于所述车体,用于感应所述车体前方立体空间内的障碍物;
4、避障雷达组,固定安装于所述车体,用于感应所述车体周围路况;以及,
5、光电感应组,固定安装于所述叉臂,用于感应所述叉臂周围的障碍物。
6、可选地,所述避障雷达组包括至少三个避障雷达,其中,至少两个所述避障雷达分别固定安装于所述车体前方的底部两侧,用于感应所述车体前方及两侧的地面路况,另一所述避障雷达固定安装于所述车体后方底部,用于感应所述车体后方的地面路况。
7、可选地,所述叉臂包括至少两条支臂,所述光电感应组包括至少两个牙尖光电和至少两个牙根光电,两个所述牙尖光电分别对应固定安装于两条所述支臂较窄的一端,用于感应所述叉臂前方是否存在障碍物,两个所述牙根光电分别对应固定安装于两条所述支臂较宽的一端,用于感应所述叉臂上方是否存在障碍物。
8、可选地,所述堆高式无人叉车还包括警示防护机构,所述警示防护机构固定安装于所述车体。
9、可选地,所述警示防护机构包括多色灯,所述多色灯固定安装于所述车体,用于指示所述车体当前运行状态。
10、可选地,所述警示防护机构包括示宽灯,所述示宽灯固定安装于所述车体顶部,用于显示所述车体的安全保护区域。
11、可选地,所述警示防护机构包括语音播放器,所述语音播放器固定安装于所述车体,用于播报所述车体的运行状态。
12、可选地,所述堆高式无人叉车还包括被动防护机构,所述被动防护机构固定安装于所述车体,用于停止所述车体的运行动作。
13、可选地,所述堆高式无人叉车包括动力系统以及电连接所述动力系统的电路板,在所述电路板上电连接有急停按钮,用以控制所述动力系统停止动作,且所述急停按钮设于所述车体的外侧面上;
14、所述被动防护机构包括所述急停按钮。
15、可选地,所述被动防护机构包括安全触边警报条,所述安全触边警报条固定安装于所述车体底部。
16、在本实用新型技术方案中,避障相机用于感应车体前方立体空间内的障碍物,避障雷达组用于感应车体周围路况,避障相机与避障雷达组共同感应车体运动路径上的障碍物,为叉车车体在运动时提供安全保障,光电感应组用于感应叉臂周围的障碍物,为叉车叉臂在运动时提供安全保障,以此实现对于无人叉车的全方位保护。
技术特征:
1.一种堆高式无人叉车,其特征在于,包括车体、叉臂以及主动防护机构,所述叉臂上下方向活动安装于所述车体,所述主动防护机构包括:
2.如权利要求1所述的堆高式无人叉车,其特征在于,所述避障雷达组包括至少三个避障雷达,其中,至少两个所述避障雷达分别固定安装于所述车体前方的底部两侧,用于感应所述车体前方及两侧的地面路况,另一所述避障雷达固定安装于所述车体后方底部,用于感应所述车体后方的地面路况。
3.如权利要求1所述的堆高式无人叉车,其特征在于,所述叉臂包括至少两条支臂,所述光电感应组包括至少两个牙尖光电和至少两个牙根光电,两个所述牙尖光电分别对应固定安装于两条所述支臂较窄的一端,用于感应所述叉臂前方是否存在障碍物,两个所述牙根光电分别对应固定安装于两条所述支臂较宽的一端,用于感应所述叉臂上方是否存在障碍物。
4.如权利要求1所述的堆高式无人叉车,其特征在于,所述堆高式无人叉车还包括警示防护机构,所述警示防护机构固定安装于所述车体。
5.如权利要求4所述的堆高式无人叉车,其特征在于,所述警示防护机构包括多色灯,所述多色灯固定安装于所述车体,用于指示所述车体当前运行状态。
6.如权利要求4所述的堆高式无人叉车,其特征在于,所述警示防护机构包括示宽灯,所述示宽灯固定安装于所述车体顶部,用于显示所述车体的安全保护区域。
7.如权利要求4所述的堆高式无人叉车,其特征在于,所述警示防护机构包括语音播放器,所述语音播放器固定安装于所述车体,用于播报所述车体的运行状态。
8.如权利要求1所述的堆高式无人叉车,其特征在于,所述堆高式无人叉车还包括被动防护机构,所述被动防护机构固定安装于所述车体,用于停止所述车体的运行动作。
9.如权利要求8所述的堆高式无人叉车,其特征在于,所述堆高式无人叉车包括动力系统以及电连接所述动力系统的电路板,在所述电路板上电连接有急停按钮,用以控制所述动力系统停止动作,且所述急停按钮设于所述车体的外侧面上;
10.如权利要求8所述的堆高式无人叉车,其特征在于,所述被动防护机构包括安全触边警报条,所述安全触边警报条固定安装于所述车体底部。
技术总结
本技术公开一种堆高式无人叉车,包括车体、叉臂和主动防护机构,叉臂上下方向活动安装在车体上。在本技术技术方案中,主动防护机构包括避障相机、避障雷达组和光电感应组,避障相机、避障雷达组和光电感应组均固定安装在车体上,避障相机用于感应车体前方立体空间内的障碍物,避障雷达组用于感应车体周围路况,光电感应组用于感应叉臂周围的障碍物,以此对叉车进行全面覆盖式的保护,从而减少安全隐患。
技术研发人员:吕朝顺,唐露,陆上英
受保护的技术使用者:劢微机器人科技(深圳)有限公司
技术研发日:20230220
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!