仓储系统的制作方法
本申请涉及智能仓储,具体涉及一种仓储系统。
背景技术:
1、叉车可以配合托盘实现货物的装卸,无人叉车则是指在计算机的指引下可以实现自动将承载有货物的托盘送入到货架上,或者自动将货物从货架上取出,搬运到指定位置的叉车。
2、目前,有的仓库存储的货物的体积较大(货物的各表面的面积均大于仓储的托盘面积),而无人叉车在运输承载有该货物的托盘时稳定性较差,导致仓储系统的运输安全性较低。
技术实现思路
1、本申请实施例公开了一种仓储系统,该仓储系统的运输安全性较高。
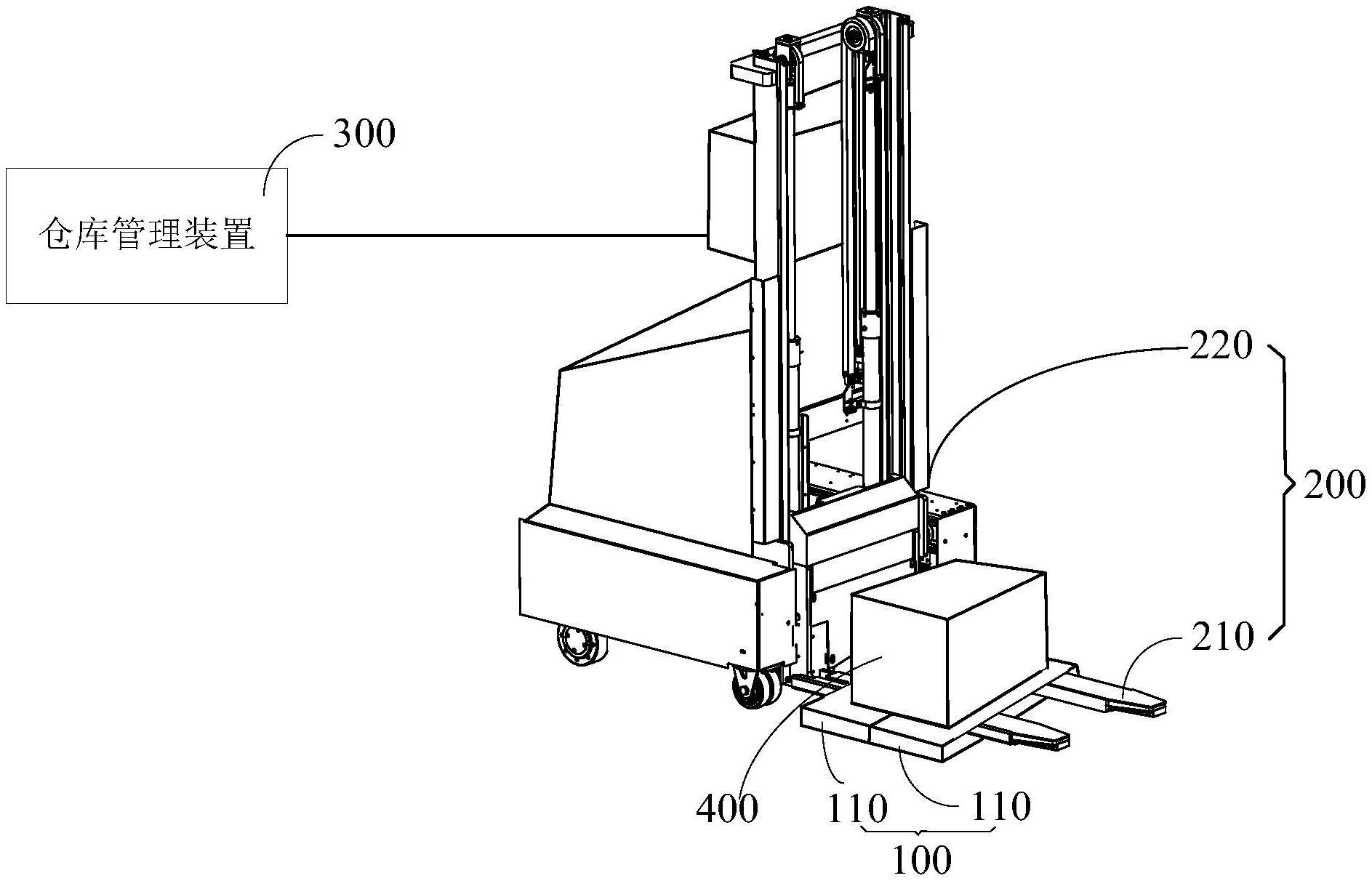
2、本申请实施例公开一种仓储系统,所述仓储系统包括:
3、双拼托盘,包括相互连接的两个托盘,用于承载货物;
4、无人叉车,包括两个货叉,所述无人叉车用于沿进叉方向叉取所述双拼托盘,每个所述货叉的长度大于所述双拼托盘沿进叉方向的长度;
5、仓储管理装置,与所述无人叉车连接,用于控制所述无人叉车将承载在所述双拼托盘上的货物,从第一位置搬运到第二位置。
6、作为一种可选的实施方式,所述仓储系统还包括:
7、货架,设置有存储空间;
8、入库装置,所述入库装置用于将所述双拼托盘以及承载在所述双拼托盘上的货物从入库位置输送到取货位置;
9、所述仓储管理装置还用于控制所述无人叉车从所述取货位置获取所述双拼托盘以及所述货物,并将所述货物搬运至所述存储空间。
10、作为一种可选的实施方式,所述入库装置包括提升机构以及第一传输机构,所述提升机构用于将所述双拼托盘以及所述货物从入库位置提升到所述第一传输机构上,所述第一传输机构用于将所述双拼托盘以及所述货物水平传输至所述取货位置。
11、作为一种可选的实施方式,所述仓储系统还包括:
12、到位检测装置,与所述仓储管理装置连接,用于检测所述双拼托盘是否到达所述取货位置;
13、所述仓储管理装置还用于在到位检测装置检测到所述双拼托盘到达所述取货位置的情况下,控制所述无人叉车从所述取货位置获取所述双拼托盘以及所述货物,并将所述货物搬运至所述存储空间。
14、作为一种可选的实施方式,所述到位检测装置包括发射单元以及接收单元,所述发射单元以及所述接收单元分别设置于所述取货位置的两侧,以使所述双拼托盘到达所述取货位置时遮挡所述发射单元向所述接收单元发射的发射信号。
15、作为一种可选的实施方式,所述货物设置有第一标识码,所述第一标识码用于标识所述货物的特征,所述双拼托盘设置有第二标识码,所述第二标识码用于标识所述双拼托盘的特征;
16、所述仓储系统还包括扫描装置,与所述仓储管理装置连接,所述扫描装置用于获取位于所述取货位置的所述货物的第一标识码,并将所述第一标识码发送至所述仓储管理装置,和/或,所述扫描装置用于获取所述第一标识码以及与所述第一标识码对应的所述第二标识码,并对所述第二标识码以及第一标识码进行绑定处理,将绑定处理生成的绑定信息发送到仓储管理装置。
17、作为一种可选的实施方式,所述仓储管理装置还用于控制所述无人叉车从所述存储空间获取所述双拼托盘以及所述货物,并将所述货物搬运至卸货位置;
18、所述仓储系统还包括出库装置,用于将所述货物从所述卸货位置输送到出库位置。
19、作为一种可选的实施方式,所述出库装置包括第二传输机构,所述第二传输机构用于将所述货物从所述卸货位置水平输送到所述出库位置。
20、作为一种可选的实施方式,所述仓储系统还包括订单装置,与所述仓储管理装置连接,用于向所述仓储管理装置发送与所述货物相关的订单信息。
21、作为一种可选的实施方式,所述仓储系统还包括充电设备,所述充电设备用于为所述无人叉车充电。
22、与相关技术相比,本申请实施例具有以下有益效果:
23、本申请实施例提供了一种仓储系统,包括双拼托盘、用于搬运双拼托盘的无人叉车以及控制无人叉车运动的仓储管理装置,其中,双拼托盘由两个托盘连接而成,无人叉车的货叉长度大于双拼托盘沿进叉方向的长度,也即该无人叉车与双拼托盘对应,无人叉车配合双拼托盘可以稳定搬运与双拼托盘的对应体积的货物,该无人叉车在仓储管理装置的控制下搬运各表面的面积均大于单个托盘的表面积的货物时,其稳定性较高,也即采用该无人叉车搬运的体积较大的货物的仓储系统的运输安全性较高。
技术特征:
1.一种仓储系统,其特征在于,所述仓储系统包括:
2.根据权利要求1所述的仓储系统,其特征在于,所述仓储系统还包括:
3.根据权利要求2所述的仓储系统,其特征在于,所述入库装置包括提升机构以及第一传输机构,所述提升机构用于将所述双拼托盘以及所述货物从入库位置提升到所述第一传输机构上,所述第一传输机构用于将所述双拼托盘以及所述货物水平传输至所述取货位置。
4.根据权利要求3所述的仓储系统,其特征在于,所述仓储系统还包括:
5.根据权利要求4所述的仓储系统,其特征在于,所述到位检测装置包括发射单元以及接收单元,所述发射单元以及所述接收单元分别设置于所述取货位置的两侧,以使所述双拼托盘到达所述取货位置时遮挡所述发射单元向所述接收单元发射的发射信号。
6.根据权利要求2至5任一所述的仓储系统,其特征在于,所述货物设置有第一标识码,所述第一标识码用于标识所述货物的特征,所述双拼托盘设置有第二标识码,所述第二标识码用于标识所述双拼托盘的特征;
7.根据权利要求2所述的仓储系统,其特征在于,所述仓储管理装置还用于控制所述无人叉车从所述存储空间获取所述双拼托盘以及所述货物,并将所述货物搬运至卸货位置;
8.根据权利要求7所述的仓储系统,其特征在于,所述出库装置包括第二传输机构,所述第二传输机构用于将所述货物从所述卸货位置水平输送到所述出库位置。
9.根据权利要求7或8所述的仓储系统,其特征在于,所述仓储系统还包括订单装置,与所述仓储管理装置连接,用于向所述仓储管理装置发送与所述货物相关的订单信息。
10.根据权利要求1所述的仓储系统,其特征在于,所述仓储系统还包括充电设备,所述充电设备用于为所述无人叉车充电。
技术总结
本申请实施例公开一种仓储系统,该仓储系统包括双拼托盘、用于搬运双拼托盘的无人叉车以及控制无人叉车运动的仓储管理装置,其中,双拼托盘由两个托盘连接而成,无人叉车的货叉长度大于双拼托盘沿进叉方向的长度,也即该无人叉车与双拼托盘对应,无人叉车配合双拼托盘可以稳定搬运与双拼托盘的对应体积的货物,该无人叉车在仓储管理装置的控制下搬运各表面的面积均大于单个托盘的表面积的货物时,其稳定性较高,也即采用该无人叉车搬运的体积较大的货物的仓储系统的运输安全性较高。
技术研发人员:杨建辉,李陆洋,方牧,鲁豫杰,郑志军
受保护的技术使用者:未来机器人(深圳)有限公司
技术研发日:20230207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!