一种伺服对中机构的制作方法
本技术涉及物料运输,特别是涉及一种伺服对中机构。
背景技术:
1、随着科学技术的进步,物料运输领域的制造技术已经达到较高的自动化水平。物料产品在传送带上的输送,通过机械夹爪和传送线体的配合,可将生产制造完成的物料产品快速便捷地运送转移至各个工位,以实现物料产品的自动化高效率的生产制造。目前,运输线通常由机架、电机、传送带等部件组成,电芯在运输线上进行流水式作业,依次运输至下一个工位。
2、然而,物料产品从运输线上流水运输操作工位时,由于运输线通常伴随着机械震动的产生,而机械震动的产生会使得物料产品在运输线的传送带运行过程中出现位置的偏移,也就是偏离原先从上一个工位进入传送带时的原始位置,因此当运输线上的物料产品送入操作工位平台时,该物料产品往往未能达到该操作平台对该物料产品的位置放置要求,导致时常需要人工进行调整,不利于物料产品的自动化生产制造作业,严重地降低了整线的生产效率。
技术实现思路
1、基于此,有必要针对如何对进入操作平台的物料产品进行精准位置调整的技术问题,提供一种伺服对中机构。
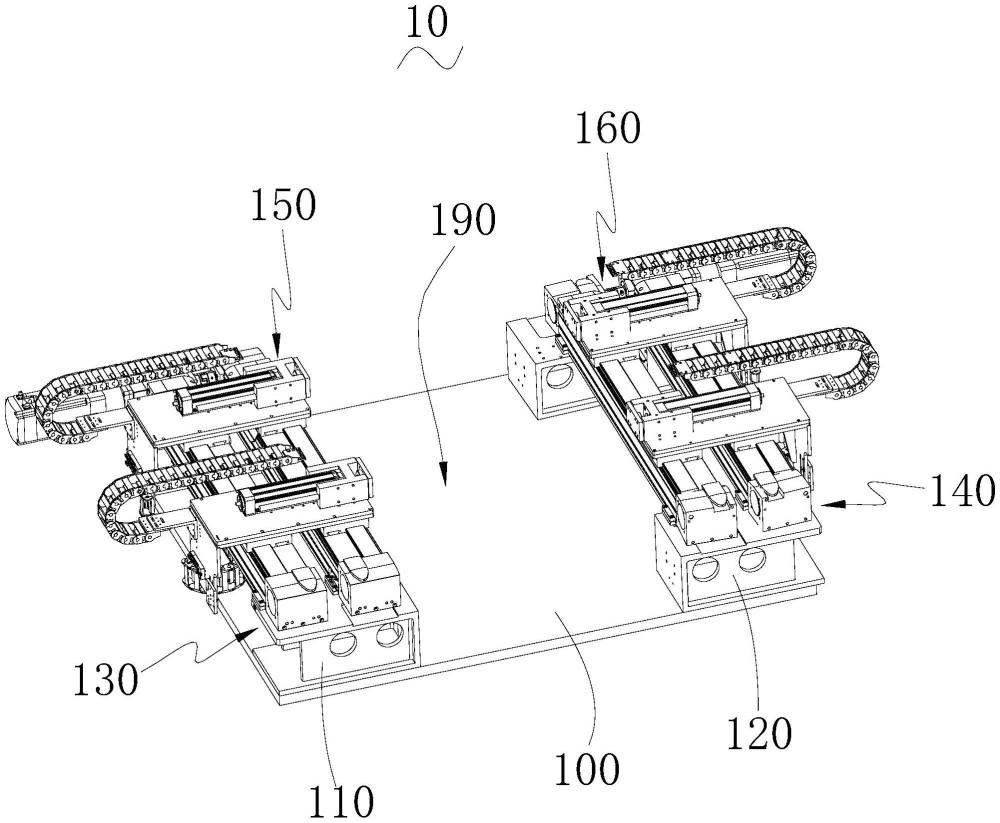
2、一种伺服对中机构,该伺服对中机构包括:安装底板、左侧模组安装座、右侧模组安装座、左侧伺服运动模组、右侧伺服运动模组、左侧气缸推板模组、右侧气缸推板模组、左侧拖链导轨板以及右侧拖链导轨板,
3、所述左侧伺服运动模组通过所述左侧模组安装座安装在所述安装底板的左侧,所述左侧伺服运动模组与所述安装底板之间具有左侧让位空间,所述左侧拖链导轨板安装在所述左侧模组安装座上并位于所述左侧让位空间;
4、所述右侧伺服运动模组通过所述右侧模组安装座安装在所述安装底板的右侧,所述右侧伺服运动模组与所述安装底板之间具有右侧让位空间,所述右侧拖链导轨板安装在所述右侧模组安装座上并位于所述右侧让位空间;
5、所述左侧气缸推板模组滑动安装在所述左侧伺服运动模组的导轨上,所述右侧气缸推板模组滑动安装在所述右侧伺服运动模组的导轨上;
6、所述左侧伺服运动模组与所述右侧伺服运动模组之间具有对中调整空间,所述左侧气缸推板模组及所述右侧气缸推板模组分别位于所述对中调整空间的两侧,所述左侧气缸推板模组及所述右侧气缸推板模组共同用于对放置在所述对中调整空间的物料产品进行对中调整。
7、在其中一个实施例中,所述左侧模组安装座的数量为两个,两个所述左侧模组安装座分别安装固定在所述安装底板左侧的前后两端,所述左侧伺服运动模组安装在两个所述左侧模组安装座安装上。
8、在其中一个实施例中,所述左侧让位空间位于两个所述左侧模组安装座之间。
9、在其中一个实施例中,所述右侧模组安装座的数量为两个,两个所述右侧模组安装座分别安装固定在所述安装底板右侧的前后两端,所述右侧伺服运动模组安装在两个所述右侧模组安装座安装上。
10、在其中一个实施例中,所述右侧让位空间位于两个所述右侧模组安装座之间。
11、在其中一个实施例中,所述左侧伺服运动模组包括左侧伺服电机、左侧第一运动导轨及左侧第二运动导轨,所述左侧伺服电机分别与所述左侧第一运动导轨及所述左侧第二运动导轨驱动连接;所述左侧第一运动导轨及所述左侧第二运动导轨平行设置,所述左侧第一运动导轨两端及所述左侧第二运动导轨的两端分别与两个所述左侧模组安装座连接。
12、在其中一个实施例中,所述左侧气缸推板模组分别与所述左侧第一运动导轨及所述左侧第二运动导轨滑动连接。
13、在其中一个实施例中,所述右侧伺服运动模组包括右侧伺服电机、右侧第一运动导轨及右侧第二运动导轨,所述右侧伺服电机分别与所述右侧第一运动导轨及所述右侧第二运动导轨驱动连接;所述右侧第一运动导轨及所述右侧第二运动导轨平行设置,所述右侧第一运动导轨两端及所述右侧第二运动导轨的两端分别与两个所述右侧模组安装座连接。
14、在其中一个实施例中,所述右侧气缸推板模组分别与所述右侧第一运动导轨及所述右侧第二运动导轨滑动连接。
15、在其中一个实施例中,所述左侧气缸推板模组包括左侧第一气缸推板模组及左侧第二气缸推板模组,所述左侧第一气缸推板模组及所述左侧第二气缸推板模组均分别与所述左侧第一运动导轨两端及所述左侧第二运动导轨滑动连接;所述右侧气缸推板模组包括右侧第一气缸推板模组及右侧第二气缸推板模组,所述右侧第一气缸推板模组及所述右侧第二气缸推板模组均分别与所述右侧第一运动导轨两端及所述右侧第二运动导轨滑动连接。
16、上述伺服对中机构,通过左侧伺服运动模组和右侧伺服运动模组,分别驱动左侧气缸推板模组及右侧气缸推板模组在对中调整空间的两侧移动,而左侧气缸推板模组及右侧气缸推板模组则分别相向推动,伸入对中调整空间,对放置在对中调整空间的物料产品进行精准对中调整。同时,通过左侧模组安装座及右侧模组安装座,分别隔开左侧模组安装座及右侧模组安装座与安装底板的之间连接,使得左侧拖链导轨板以及右侧拖链导轨板具有安装空间,以便于安装拖链,使得在拖链的作用下左侧伺服运动模组、右侧伺服运动模组、左侧气缸推板模组以及右侧气缸推板模组在运行过程更加平稳,实现了对进入安装底板内的操作平台的物料产品进行精准平稳地位置调整。
技术特征:
1.一种伺服对中机构,其特征在于,包括:安装底板、左侧模组安装座、右侧模组安装座、左侧伺服运动模组、右侧伺服运动模组、左侧气缸推板模组、右侧气缸推板模组、左侧拖链导轨板以及右侧拖链导轨板,
2.根据权利要求1所述的伺服对中机构,其特征在于,所述左侧模组安装座的数量为两个,两个所述左侧模组安装座分别安装固定在所述安装底板左侧的前后两端,所述左侧伺服运动模组安装在两个所述左侧模组安装座安装上。
3.根据权利要求2所述的伺服对中机构,其特征在于,所述左侧让位空间位于两个所述左侧模组安装座之间。
4.根据权利要求2所述的伺服对中机构,其特征在于,所述右侧模组安装座的数量为两个,两个所述右侧模组安装座分别安装固定在所述安装底板右侧的前后两端,所述右侧伺服运动模组安装在两个所述右侧模组安装座安装上。
5.根据权利要求4所述的伺服对中机构,其特征在于,所述右侧让位空间位于两个所述右侧模组安装座之间。
6.根据权利要求1-5任一项所述的伺服对中机构,其特征在于,所述左侧伺服运动模组包括左侧伺服电机、左侧第一运动导轨及左侧第二运动导轨,所述左侧伺服电机分别与所述左侧第一运动导轨及所述左侧第二运动导轨驱动连接;所述左侧第一运动导轨及所述左侧第二运动导轨平行设置,所述左侧第一运动导轨两端及所述左侧第二运动导轨的两端分别与两个所述左侧模组安装座连接。
7.根据权利要求6所述的伺服对中机构,其特征在于,所述左侧气缸推板模组分别与所述左侧第一运动导轨及所述左侧第二运动导轨滑动连接。
8.根据权利要求7所述的伺服对中机构,其特征在于,所述右侧伺服运动模组包括右侧伺服电机、右侧第一运动导轨及右侧第二运动导轨,所述右侧伺服电机分别与所述右侧第一运动导轨及所述右侧第二运动导轨驱动连接;所述右侧第一运动导轨及所述右侧第二运动导轨平行设置,所述右侧第一运动导轨两端及所述右侧第二运动导轨的两端分别与两个所述右侧模组安装座连接。
9.根据权利要求8所述的伺服对中机构,其特征在于,所述右侧气缸推板模组分别与所述右侧第一运动导轨及所述右侧第二运动导轨滑动连接。
10.根据权利要求8所述的伺服对中机构,其特征在于,所述左侧气缸推板模组包括左侧第一气缸推板模组及左侧第二气缸推板模组,所述左侧第一气缸推板模组及所述左侧第二气缸推板模组均分别与所述左侧第一运动导轨两端及所述左侧第二运动导轨滑动连接;所述右侧气缸推板模组包括右侧第一气缸推板模组及右侧第二气缸推板模组,所述右侧第一气缸推板模组及所述右侧第二气缸推板模组均分别与所述右侧第一运动导轨两端及所述右侧第二运动导轨滑动连接。
技术总结
本技术公开了一种伺服对中机构,该伺服对中机构包括:安装底板、左侧模组安装座、右侧模组安装座、左侧伺服运动模组、右侧伺服运动模组、左侧气缸推板模组、右侧气缸推板模组、左侧拖链导轨板以及右侧拖链导轨板。上述伺服对中机构,通过左侧伺服运动模组和右侧伺服运动模组,分别驱动左侧气缸推板模组及右侧气缸推板模组在对中调整空间的两侧移动,而左侧气缸推板模组及右侧气缸推板模组则分别相向推动,伸入对中调整空间,对放置在对中调整空间的物料产品进行精准对中调整。进而实现了对进入安装底板内的操作平台的物料产品进行精准平稳地位置调整。
技术研发人员:张俊峰,刘颖
受保护的技术使用者:深圳恒温精控智能装备有限公司
技术研发日:20230217
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!