吊装机械手及随车起重机的制作方法
本技术涉及起重设备,尤其涉及一种吊装机械手及随车起重机。
背景技术:
1、随着随车起重机的发展,国内各行业对起重机的功能要求越来越高,特别是对兼有起重和运输功能的随车起重机有着更高的要求。
2、随车起重机在进行吊装起重作业过程中,通常需要将用于固定吊件的吊具与吊件进行精准配合连接,但现有的随车起重机的吊装机械手控制吊具与吊件进行精准配合连接较为困难。
技术实现思路
1、针对上述现有技术中的问题,本申请提出了一种吊装机械手及随车起重机,能够便于吊具与吊件进行精准配合连接。
2、本实用新型的一方面提供一种吊装机械手,所述吊装机械手包括机械臂以及安装于所述机械臂上的吊具机构,所述吊具机构包括安装于所述机械臂上的连接座以及吊具,所述吊具通过柔性件与所述连接座柔性连接,且所述吊具能够与所述连接座刚性连接。
3、作为上述技术方案的进一步改进:
4、上述的吊装机械手,进一步地,所述吊具能够通过销轴铰接于所述连接座上。
5、上述的吊装机械手,进一步地,所述连接座上还安装有伸缩拉杆钩,所述伸缩拉杆钩能够挂设于吊件上与所述吊具配合吊装所述吊件。
6、上述的吊装机械手,进一步地,所述连接座上还安装有视觉机构,所述视觉机构能够辅助吊件的对接与安装。
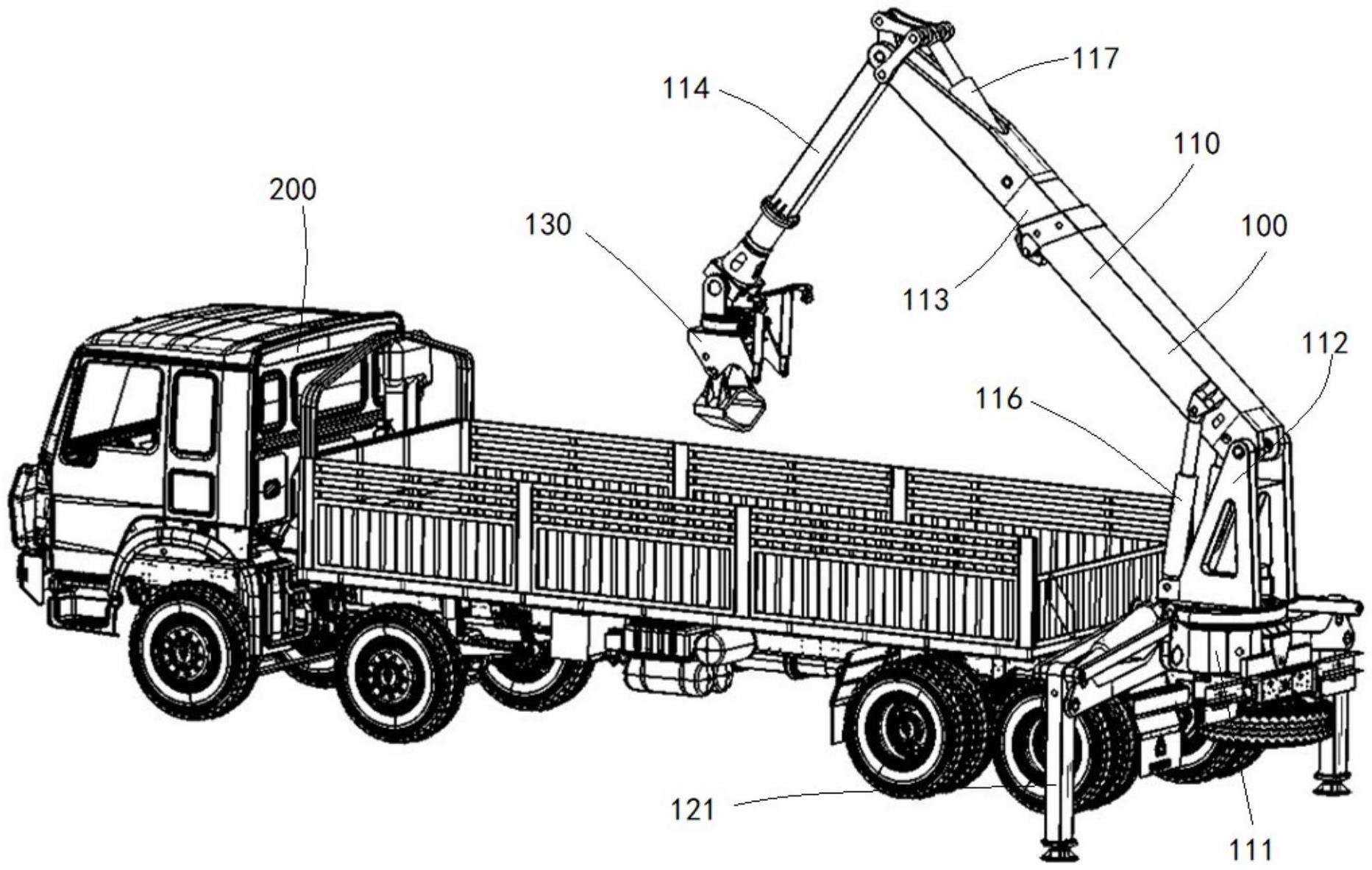
7、上述的吊装机械手,进一步地,所述机械臂包括底座、转台、主臂以及折臂,所述转台通过第一回转机构安装于所述底座上,所述主臂铰接于所述转台上,并能够通过第一变幅机构调节所述主臂相对于所述转台的转动角度,所述折臂铰接于所述转台上,并能够通过第二变幅机构调节所述折臂相对于所述主臂的转动角度,所述连接座安装于所述折臂上。
8、上述的吊装机械手,进一步地,所述折臂上安装有旋转机构,所述旋转机构上安装有摆转机构,所述连接座通过第二回转机构安装于所述摆转机构上,所述旋转机构、所述摆转机构以及所述第二回转机构的旋转轴相互垂直。
9、上述的吊装机械手,进一步地,所述主臂为能够伸缩的伸缩臂。
10、上述的吊装机械手,进一步地,所述底座上还安装有支腿机构。
11、本实用新型的另一方面提供一种随车起重机,所述随车起重机包括如上述的吊装机械手。
12、上述技术特征可以各种适合的方式组合或由等效的技术特征来替代,只要能够达到本实用新型的目的。
13、本实用新型提供的一种吊装机械手及随车起重机,与现有技术相比,至少具备有以下有益效果:在使用该吊装机械手进行吊装作业时,首先通过机械臂将吊具机构移动至靠近所需吊装的吊件的位置,解除吊具与连接座的刚性连接,使吊具通过柔性件与连接座柔性连接,便于吊具与吊件进行精准配合连接,降低了在吊具与连接座刚性连接状态下人工进行吊具与吊件精准配合连接的困难性,吊具与吊件进行精准配合连接以后,再将吊具与连接座进行刚性连接,便于吊件的平稳吊装。
14、为使本实用新型的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
技术特征:
1.一种吊装机械手,其特征在于,所述吊装机械手包括机械臂以及安装于所述机械臂上的吊具机构,所述吊具机构包括安装于所述机械臂上的连接座以及吊具,所述吊具通过柔性件与所述连接座柔性连接,且所述吊具能够与所述连接座刚性连接。
2.根据权利要求1所述的吊装机械手,其特征在于,所述吊具能够通过销轴铰接于所述连接座上。
3.根据权利要求1所述的吊装机械手,其特征在于,所述连接座上还安装有伸缩拉杆钩,所述伸缩拉杆钩能够挂设于吊件上与所述吊具配合吊装所述吊件。
4.根据权利要求1所述的吊装机械手,其特征在于,所述连接座上还安装有视觉机构,所述视觉机构能够辅助吊件的对接与安装。
5.根据权利要求1所述的吊装机械手,其特征在于,所述机械臂包括底座、转台、主臂以及折臂,所述转台通过第一回转机构安装于所述底座上,所述主臂铰接于所述转台上,并能够通过第一变幅机构调节所述主臂相对于所述转台的转动角度,所述折臂铰接于所述转台上,并能够通过第二变幅机构调节所述折臂相对于所述主臂的转动角度,所述连接座安装于所述折臂上。
6.根据权利要求5所述的吊装机械手,其特征在于,所述折臂上安装有旋转机构,所述旋转机构上安装有摆转机构,所述连接座通过第二回转机构安装于所述摆转机构上,所述旋转机构、所述摆转机构以及所述第二回转机构的旋转轴相互垂直。
7.根据权利要求5所述的吊装机械手,其特征在于,所述主臂为能够伸缩的伸缩臂。
8.根据权利要求5所述的吊装机械手,其特征在于,所述底座上还安装有支腿机构。
9.一种随车起重机,其特征在于,所述随车起重机包括如权利要求1至8任一项所述的吊装机械手。
技术总结
本技术提供了一种吊装机械手及随车起重机,涉及起重设备技术领域。该吊装机械手包括机械臂以及安装于机械臂上的吊具机构,吊具机构包括安装于机械臂上的连接座以及吊具,吊具通过柔性件与连接座柔性连接,且吊具能够与连接座刚性连接。该吊装机械手便于吊具与吊件进行精准配合连接,降低了在吊具与连接座刚性连接状态下人工进行吊具与吊件精准配合连接的困难性。
技术研发人员:李朝弟,宋院归,李义,罗晓春
受保护的技术使用者:中联恒通机械有限公司
技术研发日:20230223
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!