堆取料机控制系统的制作方法
本技术一般涉及堆取料机领域,尤其涉及一种堆取料机控制系统。
背景技术:
1、刮板取料机在火力发电厂中是煤料运输和存储系统中极为重要的环节,主要是用来负责煤料的运输和存储。相比在露天场合下工作的传统型堆取料机而言,对环境的不良影响更小,属于环境友好型设备。刮板取料机的优点主要包括:料场占用的面积小、高效环保、具有混匀物料堆取的功能、工作效率高、设备自动化的水平高。同时提高了取料性能,更具有实用性。
2、当前很多设备只存在机上手自动操作,对操作工的技术要求很高,工作任务很重;堆料机的操作模式一直以来都是人工手动操作,劳动强度大,自动化程度低,作业效率根据司机的疲劳程度、操作水平等起伏较大,容易出现作业质量事故等问题。因此,设计出一套全天候智能堆料的控制系统对减少司机数量、降低劳动强度、提高作业效率和作业质量方面都有着重大的意义。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供一种能够进行远程控制的堆取料机控制系统。
2、第一方面,本实用新型的堆取料机控制系统,该堆取料机控制系统包括:
3、触摸屏;
4、电源模块;
5、刮板控制模块,其包括第一控制单元和刮板电机,所述刮板电机与所述第一控制单元电连接,所述第一控制单元与所述电源模块电连接;
6、卷扬机控制模块,其包括第二控制单元、卷扬电机和倾角传感器,所述卷扬电机与所述第二控制单元电连接,所述第二控制单元与所述电源模块电连接;
7、固定端控制模块,其包括第三控制单元、第一固定端行走电机和固定端编码器,所述第一固定端行走电机与所述第三控制单元电连接,所述第三控制单元与所述电源模块电连接;
8、摆动端控制模块,其包括第四控制单元和第一摆动端行走电机,所述第一摆动端行走电机与所述第四控制单元电连接,所述第四控制单元与所述电源模块电连接;
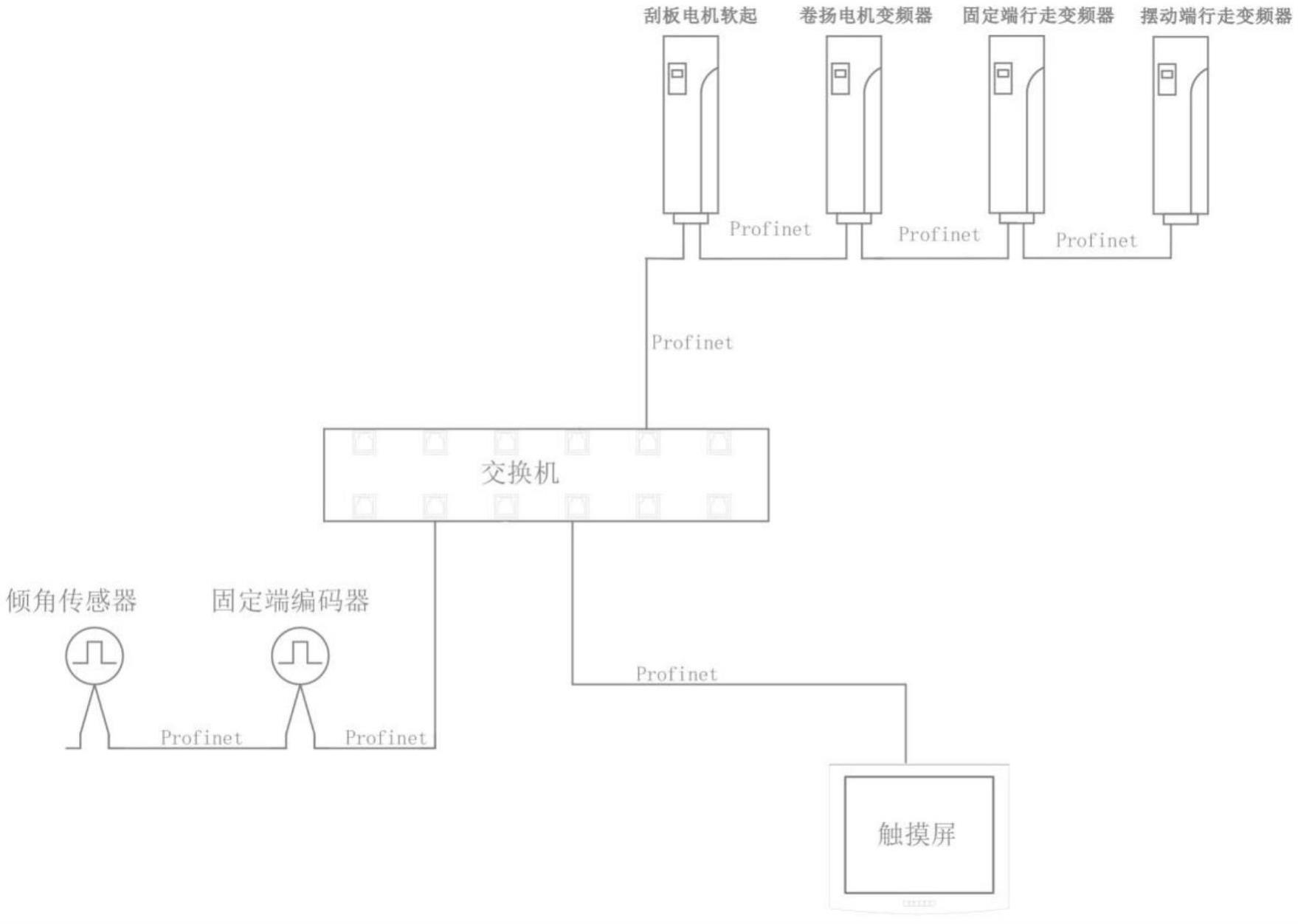
9、交换机,
10、所述第一控制单元、所述第二控制单元、所述第三控制单元、所述第四控制单元、所述触摸屏、所述倾角传感器和所述固定端编码器分别通过profinet协议与所述交换机进行通信。
11、根据本申请实施例提供的技术方案,通过在触摸屏上操作,控制刮板电机、卷扬电机、第一固定端行走电机和第一摆动端行走电机动作,实现对堆取料机进行远程控制,降低了操作工的工作强度以及技术要求,提高了堆取料机的作业效率和作业质量。
技术特征:
1.一种堆取料机控制系统,其特征在于,该堆取料机控制系统包括:
2.根据权利要求1所述的堆取料机控制系统,其特征在于,所述第一控制单元与所述电源模块之间设置有第一热继电器刀闸。
3.根据权利要求1所述的堆取料机控制系统,其特征在于,所述第二控制单元与所述电源模块之间设置有第二热继电器刀闸。
4.根据权利要求1所述的堆取料机控制系统,其特征在于,所述第三控制单元与所述电源模块之间设置有第三热继电器刀闸。
5.根据权利要求1所述的堆取料机控制系统,其特征在于,所述固定端控制模块还包括第二固定端行走电机,所述第一固定端行走电机与所述第二固定端行走电机并联。
6.根据权利要求1所述的堆取料机控制系统,其特征在于,所述第四控制单元与所述电源模块之间设置有第四热继电器刀闸。
7.根据权利要求1所述的堆取料机控制系统,其特征在于,所述摆动端控制模块还包括第二摆动端行走电机,所述第一摆动端行走电机与所述第二摆动端行走电机并联。
8.根据权利要求1所述的堆取料机控制系统,其特征在于,所述固定端控制模块还包括第一固定端风机和第二固定端风机,所述第一固定端风机和所述第二固定端风机并联,所述第一固定端风机与所述电源模块电连接,所述第一固定端风机与所述电源模块之间设置有第五热继电器刀闸。
9.根据权利要求1所述的堆取料机控制系统,其特征在于,所述摆动端控制模块还包括第一摆动端风机和第二摆动端风机,所述第一摆动端风机和所述第二摆动端风机并联,所述第一摆动端风机与所述电源模块电连接,所述第一摆动端风机与所述电源模块之间设置有第六热继电器刀闸。
10.根据权利要求1所述的堆取料机控制系统,其特征在于,还包括第一固定端制动器、第二固定端制动器、第一摆动端制动器和第二摆动端制动器,所述第一固定端制动器和所述第二固定端制动器并联,所述第一摆动端制动器和所述第二摆动端制动器并联,所述第一固定端制动器和所述第一摆动端制动器分别与所述电源模块电连接,所述第一固定端制动器与所述电源模块之间设置有第七热继电器刀闸,所述第一摆动端制动器与所述电源模块之间设置有第八热继电器刀闸。
技术总结
本申请公开了一种堆取料机控制系统,该堆取料机控制系统包括:触摸屏;电源模块;刮板控制模块;卷扬机控制模块;固定端控制模块;摆动端控制模块;交换机,所述第一控制单元、所述第二控制单元、所述第三控制单元、所述第四控制单元、所述触摸屏、所述倾角传感器和所述固定端编码器分别通过Profinet协议与所述交换机进行通信。根据本申请实施例提供的技术方案,通过在触摸屏上操作,控制刮板电机、卷扬电机、第一固定端行走电机和第一摆动端行走电机动作,实现对堆取料机进行远程控制,降低了操作工的工作强度以及技术要求,提高了堆取料机的作业效率和作业质量。
技术研发人员:宋才华,李丽伟,陈胜伟,施婉春
受保护的技术使用者:江苏嘉通能源有限公司
技术研发日:20230223
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!