一种货物搬运用的可调式组盘机夹爪的制作方法
本技术涉及货物搬运,尤其涉及一种货物搬运用的可调式组盘机夹爪。
背景技术:
1、随着清洁能源的持续开发,锂电池在各行业中有着广泛的应用,例如纯电动汽车、混合动力装置、插电式混合动力汽车以及船舶、轨道交通,太阳能、风力发电系统等。尤其是随着电动汽车的发展,对锂电池的需求也越来越大。
2、相关技术中,锂电池电芯在生产过程中通常需要借助机械抓手在不同工位工序间流转,然而目前的机械夹爪通常一次只能对单个电芯进行转移作业,存在效率低下的问题。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本申请提供了一种货物搬运用的可调式组盘机夹爪。
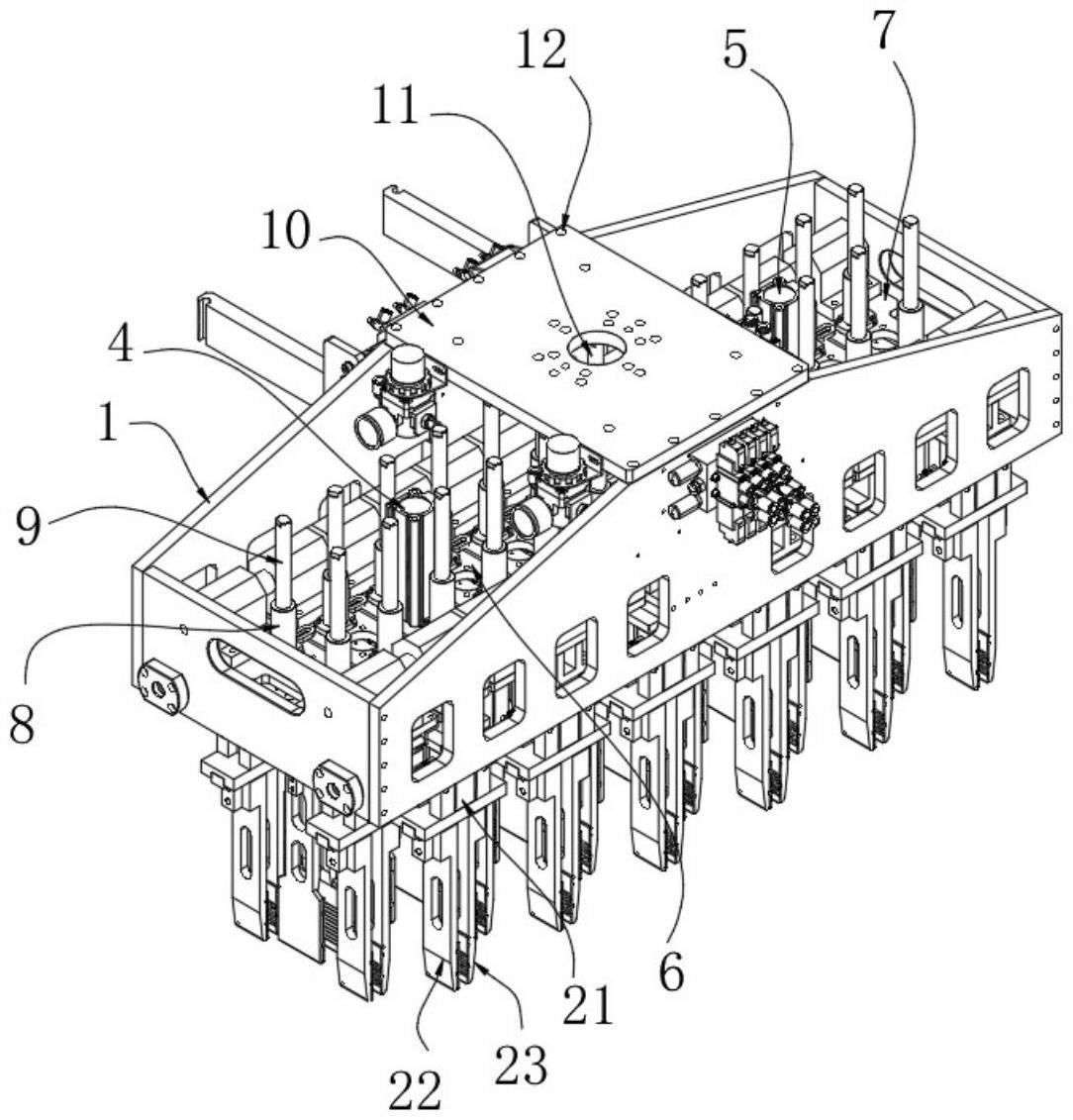
2、本申请提供了一种货物搬运用的可调式组盘机夹爪,包括:
3、夹爪座;
4、至少一活动架,其可升降地设于所述夹爪座上;
5、至少一组夹爪组件,其安装在所述活动架上,用于对待搬运的货物进行夹紧;
6、其中,每一组所述夹爪组件包括多个夹爪气缸,所述夹爪气缸间隔并排在所述活动架上,每个所述夹爪气缸上设置有左夹爪和右夹爪,且相邻所述夹爪气缸之间设有调节件,所述调节件用于调节相邻所述夹爪气缸之间的距离;
7、在所述夹爪气缸驱动的情况下,所述左夹爪和所述右夹爪相互靠近或远离,以对待搬运的货物进行夹紧。
8、在一种可能的实施方式中,所述至少一活动架设置有两个,分别为第一活动架和第二活动架,所述第一活动架和所述第二活动架可升降地设于所述夹爪座上;
9、所述至少一组夹爪组件设有两组,分别为第一夹爪组件和第二夹爪组件,所述第一夹爪组件安装在所述第一活动架上,所述第二夹爪组件安装在所述第二活动架上;
10、在驱动所述第一活动架和/或所述第二活动架运动的情况下,所述第一夹爪组件和/或所述第二夹爪组件被带动进行升降,以运动至待搬运的货物位置进行夹紧。
11、在一种可能的实施方式中,还包括第一升降气缸和第二升降气缸,所述夹爪座的内部并排设置有第一固定板和第二固定板,所述第一固定板和所述第二固定板分别位于所述第一活动架和所述第二活动架的上方,所述第一升降气缸和所述第二升降气缸分别固定在所述第一固定板和所述第二固定板上,且所述第一升降气缸的活塞杆穿过所述第一固定板与所述第一活动架连接,所述第二升降气缸的活塞杆穿过所述第二固定板与所述第二活动架连接。
12、在一种可能的实施方式中,所述第一固定板和所述第二固定板上均设有导套,所述导套内可滑动地设有导杆,所述导杆的下端穿过所述第一固定板或所述第二固定板与所述第一活动架或所述第二活动架连接。
13、在一种可能的实施方式中,所述夹爪座的顶端设有连接板,所述连接板的中部设有安装口,所述安装口用于与机械手进行连接。
14、在一种可能的实施方式中,所述连接板的两端设于第一固定孔,所述夹爪座的顶端设有与所述第一固定孔相适配的第二固定孔。
15、在一种可能的实施方式中,还包括调节件,所述调节件位于相邻所述夹爪气缸之间,且所述调节件用于调节相邻所述夹爪气缸之间的距离。
16、在一种可能的实施方式中,所述调节件包括驱动气缸,所述驱动气缸的活塞杆与相邻夹爪气缸中的一个相连。
17、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:
18、利用机械手或其他的动力件驱动夹爪座运动至待搬运货物的位置,之后再驱动活动架进行运动,以带动夹爪组件伸向待搬运的货物,并进行夹紧,从而实现对货物的自动搬运,减轻了工人的劳动强度,有利于提升加工效率。另外,设置多组夹爪组件实现了一次能够同步抓取多个锂电池电芯的效果,大大提升了锂电池电芯的抓取和转移效率。
技术特征:
1.一种货物搬运用的可调式组盘机夹爪,其特征在于,包括:
2.根据权利要求1所述的货物搬运用的可调式组盘机夹爪,其特征在于,
3.根据权利要求2所述的货物搬运用的可调式组盘机夹爪,其特征在于,还包括第一升降气缸和第二升降气缸,所述夹爪座的内部并排设置有第一固定板和第二固定板,所述第一固定板和所述第二固定板分别位于所述第一活动架和所述第二活动架的上方,所述第一升降气缸和所述第二升降气缸分别固定在所述第一固定板和所述第二固定板上,且所述第一升降气缸的活塞杆穿过所述第一固定板与所述第一活动架连接,所述第二升降气缸的活塞杆穿过所述第二固定板与所述第二活动架连接。
4.根据权利要求3所述的货物搬运用的可调式组盘机夹爪,其特征在于,所述第一固定板和所述第二固定板上均设有导套,所述导套内可滑动地设有导杆,所述导杆的下端穿过所述第一固定板或所述第二固定板与所述第一活动架或所述第二活动架连接。
5.根据权利要求1所述的货物搬运用的可调式组盘机夹爪,其特征在于,所述夹爪座的顶端设有连接板,所述连接板的中部设有安装口,所述安装口用于与机械手进行连接。
6.根据权利要求5所述的货物搬运用的可调式组盘机夹爪,其特征在于,所述连接板的两端设于第一固定孔,所述夹爪座的顶端设有与所述第一固定孔相适配的第二固定孔。
7.根据权利要求1所述的货物搬运用的可调式组盘机夹爪,其特征在于,还包括调节件,所述调节件位于相邻所述夹爪气缸之间,且所述调节件用于调节相邻所述夹爪气缸之间的距离。
8.根据权利要求7所述的货物搬运用的可调式组盘机夹爪,其特征在于,所述调节件包括驱动气缸,所述驱动气缸的活塞杆与相邻夹爪气缸中的一个相连。
技术总结
本公开实施例涉及一种货物搬运用的可调式组盘机夹爪,包括:夹爪座、至少一活动架以及至少一组夹爪组件;至少一活动架可升降地设于所述夹爪座上;至少一组夹爪组件安装在所述活动架上,用于对待搬运的货物进行夹紧;其中,每一组夹爪组件包括多个夹爪气缸,夹爪气缸间隔并排在活动架上,每个夹爪气缸上设置有左夹爪和右夹爪,且相邻夹爪气缸之间设有调节件,调节件用于调节相邻夹爪气缸之间的距离;在夹爪气缸驱动的情况下,左夹爪和右夹爪相互靠近或远离,以对待搬运的货物进行夹紧。本公开实施例的技术方案,实现了一次能够同步抓取多个锂电池电芯的效果,大大提升了锂电池电芯的抓取和转移效率。
技术研发人员:张昆明,高欢欢,高族成
受保护的技术使用者:深圳市智佳能自动化有限公司
技术研发日:20230227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!