调整机构以及移动机器人的制作方法
本申请涉及机器人,具体涉及一种调整机构以及移动机器人。
背景技术:
1、随着现在智慧工厂的越来越普及,移动机器人越来越多地用于工厂的物流搬运,因此,行业对这种移动机器人的安全性、可靠性、稳定性也就提出了更高的要求。
技术实现思路
1、本申请的目的在于提出一种调整机构以及移动机器人,以改善上述至少一项技术问题。本申请通过以下技术方案来实现上述目的。
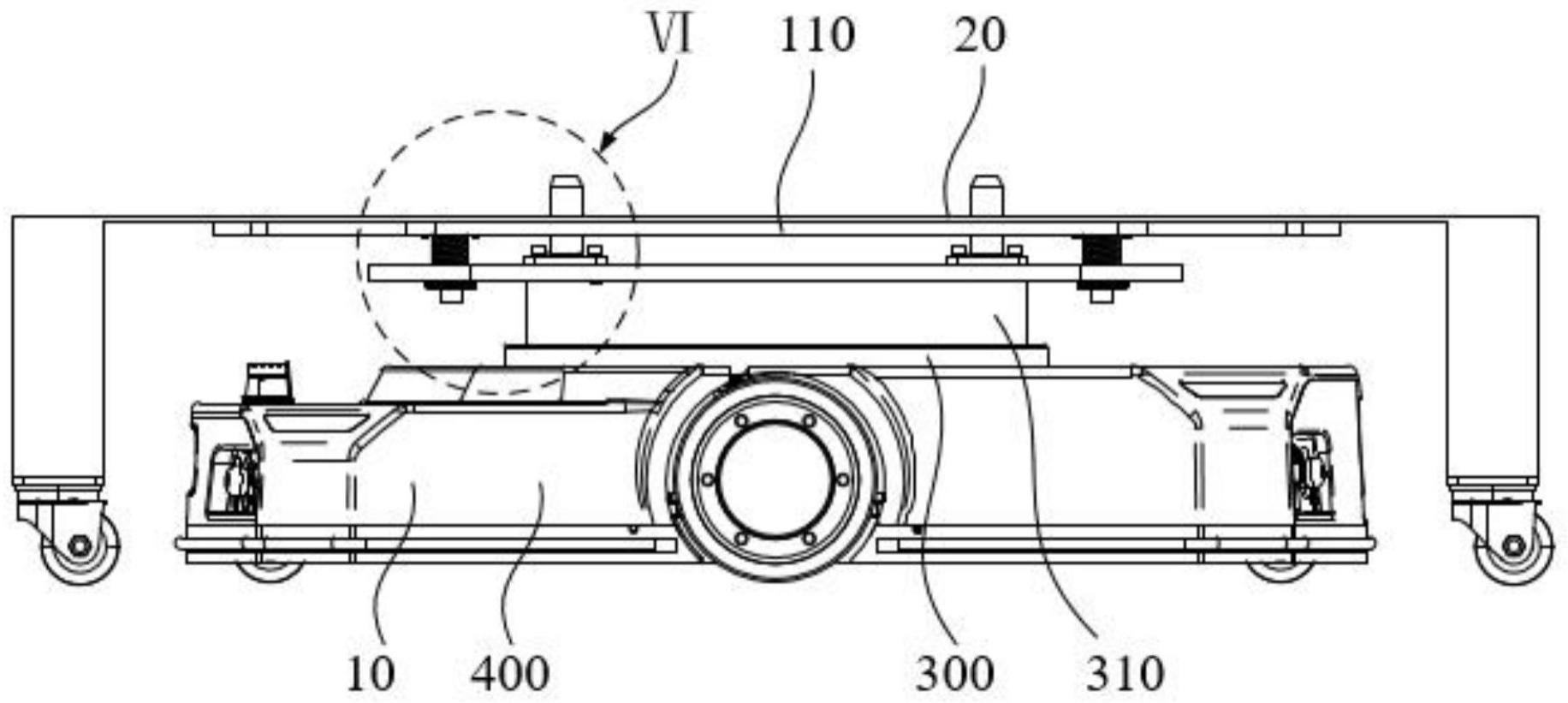
2、第一方面,本申请实施方式提供了一种调整机构,调整机构应用于具有顶升装置的移动机器人,调整机构包括顶板、弹性件以及牵引件,顶板位于顶升装置的升降端的上方,弹性件连接于顶板和顶升装置的升降端之间,弹性件具有沿顶板向顶升装置方向的弹性形变量;牵引件连接于顶升装置的升降端并穿设于顶板。
3、在一种实施方式中,调整机构还包括支撑件,支撑件位于顶板与顶升装置的升降端之间,弹性件与牵引件均通过支撑件连接于顶升装置的升降端;顶板设有通孔,牵引件穿设于通孔。
4、在一种实施方式中,调整机构还包括滑动件,滑动件位于支撑件和顶板之间,滑动件连接于支撑件和顶板中的其中一个,并可滑动地穿设于支撑件和顶板中另一个,弹性件套设于滑动件。
5、在一种实施方式中,滑动件连接于顶板并可滑动地穿设于支撑件。
6、在一种实施方式中,滑动件可拆卸地连接于支撑件和顶板之间,弹性件可拆卸地套设于滑动件,牵引件可拆卸地连接于支撑件。
7、在一种实施方式中,弹性件可拆卸地连接于顶板和顶升装置的升降端之间,牵引件可拆卸地连接于所顶升装置的升降端。
8、在一种实施方式中,弹性件为弹簧。
9、在一种实施方式中,弹性件的数量为多个,多个弹性件间隔分布于顶板和顶升装置的升降端之间。
10、在一种实施方式中,牵引件的数量为多个,多个牵引件间隔分布于顶升装置的升降端。
11、第一方面,本申请实施方式提供了一种移动机器人,移动机器人包括移动底座、顶升装置以及上述任一实施方式中的调整机构,顶升装置连接于移动底座,调整机构连接于顶升装置的升降端。
12、本申请实施方式提供的调整机构以及移动机器人中,调整机构包括顶板、弹性件以及牵引件,弹性件连接于顶板和顶升装置的升降端之间,弹性件具有沿顶板向顶升装置方向的弹性形变量,牵引件连接于顶升装置的升降端并穿设于顶板。如此,顶升装置的升降端可以通过弹性件带动顶板上升和下降,以便于搬运和卸下货架。牵引件可以插设并抵接于需要搬运的货架,起到牵引和定位的作用,使得移动机器人可以潜伏式牵引货架移动,在货架的支腿不离开地面的情况,通过牵引件牵引货架稳定地移动,有助于避免货架出现倾覆的风险。此外,当顶板收受到货架的压力时,弹性件发生弹性形变,顶板和顶升装置的升降端之间的间隙减小,使得货架的部分重量可以施加至移动机器人,以增加移动机器人的负载,增加了移动机器人和地面的摩擦,有助于避免因牵引件牵引货架移动时受到的反作用力导致移动机器人在移动时出现打滑的情况,提升了移动机器人的安全性、可靠性和稳定性。
技术特征:
1.一种调整机构,其特征在于,所述调整机构应用于具有顶升装置的移动机器人,所述调整机构包括:
2.根据权利要求1所述的调整机构,其特征在于,所述调整机构还包括支撑件,所述支撑件位于所述顶板与所述顶升装置的升降端之间,所述弹性件与所述牵引件均通过所述支撑件连接于所述顶升装置的升降端;所述顶板设有通孔,所述牵引件穿设于所述通孔。
3.根据权利要求2所述的调整机构,其特征在于,所述调整机构还包括滑动件,所述滑动件位于所述支撑件和所述顶板之间,所述滑动件连接于所述支撑件和所述顶板中的其中一个,并可滑动地穿设于所述支撑件和所述顶板中另一个,所述弹性件套设于所述滑动件。
4.根据权利要求3所述的调整机构,其特征在于,所述滑动件连接于所述顶板并可滑动地穿设于所述支撑件。
5.根据权利要求3所述的调整机构,其特征在于,所述滑动件可拆卸地连接于所述支撑件和所述顶板之间,所述弹性件可拆卸地套设于所述滑动件,所述牵引件可拆卸地连接于所述支撑件。
6.根据权利要求1所述的调整机构,其特征在于,所述弹性件可拆卸地连接于所述顶板和所述顶升装置的升降端之间,所述牵引件可拆卸地连接于所顶升装置的升降端。
7.根据权利要求1所述的调整机构,其特征在于,所述弹性件为弹簧。
8.根据权利要求1所述的调整机构,其特征在于,所述弹性件的数量为多个,多个所述弹性件间隔分布于所述顶板和所述顶升装置的升降端之间。
9.根据权利要求1所述的调整机构,其特征在于,所述牵引件的数量为多个,多个所述牵引件间隔分布于所述顶升装置的升降端。
10.一种移动机器人,其特征在于,包括:
技术总结
本申请提供了一种调整机构以及移动机器人,调整机构应用于具有顶升装置的移动机器人,调整机构包括顶板、弹性件以及牵引件,顶板位于顶升装置的升降端的上方,弹性件连接于顶板和顶升装置的升降端之间,弹性件具有沿顶板向顶升装置方向的弹性形变量;牵引件连接于顶升装置的升降端并穿设于顶板。顶升装置的升降端可以通过弹性件带动顶板上升和下降,以便于搬运和卸下货架。移动机器人可以通过牵引件牵引货架稳定地移动,有助于避免货架出现倾覆的风险。当顶板收受到货架的压力时,弹性件发生弹性形变,货架的部分重量施加至移动机器人,有助于避免因牵引件牵引货架移动时受到的反作用力导致移动机器人在移动时出现打滑的情况。
技术研发人员:陈浩,张剑,阮兆武
受保护的技术使用者:广东美的电气有限公司
技术研发日:20230302
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!