一种码垛机夹爪的制作方法
本技术涉及码垛机夹爪,具体为一种码垛机夹爪。
背景技术:
1、在机场、物流转运站等需要大量包裹转运的场景,依靠人工进行搬运,效率较低,且损毁较大,因此,需借助机械设备进行包裹转运,通常借助于码垛机进行包裹转运;
2、但是,区别于工厂生产场景中,码垛产品较为单一,其外形尺寸和耐压度一致性较高,因此夹爪的抓取力仅需设定固定值就行,而机场、物流转运站内包裹种类较多,尺寸和耐压程度不一致,往往需要借助测距仪等设备先行对货物尺寸进行检测,但是货物在被夹持时,自身会产生部分形变,造成夹持不稳定;
3、另外,对于部分商品,由于传感器对物品宽度测量时,存在误差,而现有的夹爪均为刚性结构,当测量宽度小于实际宽度时,会因夹持力过大,造成物品损坏的情况。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种码垛机夹爪,能够主动修正夹持力度,保证夹持力的同时,不会对货物造成损毁,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种码垛机夹爪,包括安装架和若干组通过聚拢进行物体抓取的夹持体,所述安装架与夹持体之间设置有驱动夹持体聚拢的驱动缸;
3、所述驱动缸其中一端或两端同轴滑动设置摇篮架,所述驱动缸与摇篮架之间沿相对滑动方向设置有弹性柱。
4、作为本实用新型的一种优选技术方案,还包括控制臂和平衡杆,所述夹持体为直角结构,所述安装架、控制臂、平衡杆和夹持体的水平部分组成正平行的四连杆机构,所述驱动缸的两端分别与安装架和控制臂的中段或下段位置铰接;
5、通过正平行四连杆结构,使夹持体的竖直部分始终保持平行状态,相对翻转式夹爪,有效缩减了夹爪张开时的尺寸,从而更加适合狭小环境的使用。
6、作为本实用新型的一种优选技术方案,所述驱动缸的固定端与安装架铰接,所述摇篮架设置在驱动缸的活动端,且摇篮架与控制臂的中段铰接;
7、对于部分工况场景,单独建设气源设备或液压设备,成本较高,因此驱动缸优选电动伸缩杆,结构简单,建设成本低;
8、同时通过摇篮架的结构设计,使驱动缸在伸缩时,通过弹性柱的形变,具备一定的弹性形变,即保证夹爪的夹持稳定,同时避免夹爪力过大造成的货物损坏。
9、作为本实用新型的一种优选技术方案,所述摇篮架包括相对固定的架体、滑筒和轴体,所述驱动缸的活动端同轴滑动套接在滑筒内部,架体两端的轴体垂直于驱动缸,且能够与控制臂转动安装;
10、通过设置滑筒以保证驱动缸活动部分与摇篮架相对位置的稳定性,同时在实际使用时,可在滑筒与驱动缸之间增加如霍尔式位移传感器,以测定两者的相对位移量,即可换算得弹性柱的形变量,可得此时夹持体对物体的夹持力,从而通过对驱动缸长度的精准控制,实现夹持力的精准控制。
11、作为本实用新型的一种优选技术方案,所述夹持体的竖直部分底部向中心靠拢,其与竖直方向夹角为0-45°,所述平衡杆为可被拉升的阻尼杆,且阻尼杆两端连接设置有弹簧;当阻尼杆被拉伸至最大长度时,夹持体的竖直部分与竖直方向夹角为0°;
12、通过夹持体竖直部分的内倾设计,使夹持体满足不规则外形的货物夹持,且当对超重货物抓取时,当夹持体对货物侧边摩擦力始终小于货物重力时,能够通过夹持体底部开口扩大的方式将货物释放,从而避免造成货物外观面受损。
13、与现有技术相比,本实用新型的有益效果是:本码垛机夹爪通过在驱动缸端部增加摇篮架和弹性柱的形式,使夹持体与驱动缸之间具有一定的相对弹性形变余量,即夹持体触碰货物停止后,驱动缸依旧具有一定过载余量,通过弹性柱的形变进行能量吸收,避免夹持力过大造成的货物损毁,同时也能够弥补传感器对货物宽度测量误差的影响,保证夹持稳定。
技术特征:
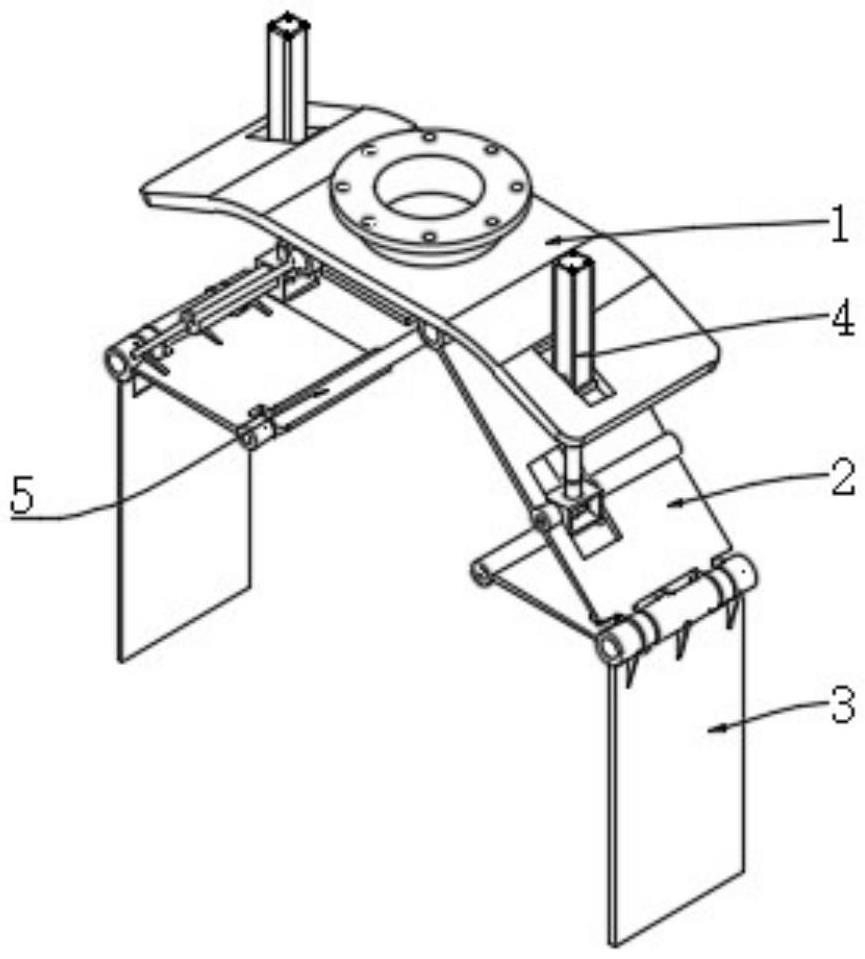
1.一种码垛机夹爪,包括安装架(1)和若干组通过聚拢进行物体抓取的夹持体(3),其特征在于:所述安装架(1)与夹持体(3)之间设置有驱动夹持体(3)聚拢的驱动缸(4);
2.根据权利要求1所述的码垛机夹爪,其特征在于:还包括控制臂(2)和平衡杆(5),所述夹持体(3)为直角结构,所述安装架(1)、控制臂(2)、平衡杆(5)和夹持体(3)的水平部分组成正平行的四连杆机构,所述驱动缸(4)的两端分别与安装架(1)和控制臂(2)的中段或下段位置铰接。
3.根据权利要求2所述的码垛机夹爪,其特征在于:所述驱动缸(4)的固定端与安装架(1)铰接,所述摇篮架(401)设置在驱动缸(4)的活动端,且摇篮架(401)与控制臂(2)的中段铰接。
4.根据权利要求2所述的码垛机夹爪,其特征在于:所述摇篮架(401)包括相对固定的架体、滑筒和轴体,所述驱动缸(4)的活动端同轴滑动套接在滑筒内部,架体两端的轴体垂直于驱动缸(4),且能够与控制臂(2)转动安装。
5.根据权利要求2-4中任意一项所述的码垛机夹爪,其特征在于:所述夹持体(3)的竖直部分底部向中心靠拢,其与竖直方向夹角为0-45°,所述平衡杆(5)为可被拉升的阻尼杆,且阻尼杆两端连接设置有弹簧;当阻尼杆被拉伸至最大长度时,夹持体(3)的竖直部分与竖直方向夹角为0°。
技术总结
本技术公开了一种码垛机夹爪,包括安装架和若干组通过聚拢进行物体抓取的夹持体,所述安装架与夹持体之间设置有驱动夹持体聚拢的驱动缸;所述驱动缸其中一端或两端同轴滑动设置摇篮架,所述驱动缸与摇篮架之间沿相对滑动方向设置有弹性柱,本码垛机夹爪能够主动修正夹持力度,保证夹持力的同时,不会对货物造成损毁。
技术研发人员:付焕然,傅东有
受保护的技术使用者:郑州海富机电设备有限公司
技术研发日:20230303
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!