一种上餐装置的制作方法
本技术涉及餐饮设施领域,具体涉及一种上餐装置。
背景技术:
1、随着人工智能的普及和快速发展,餐厅智能化的脚步也在加快,目前流行的智能餐厅服务模式大多数是:采用机器人传菜和使用固定轨道传菜。这些传菜系统均存在效率低(比如:某餐厅导轨传菜,菜品到达一桌后,如果这一种迟迟不取走菜品,那后传送系统就一直停留,这样的传菜效率极低,同时就餐桌与桌之间会产生等待影响,再比如机器人传菜,一次只能向一桌发送菜品,而且不取走也会让机器人一直停在那里,效率极低)、智能化程度不够高(极少有就餐人、厨房、传送系统的智能交互过程,少了一些就餐乐趣)、菜品在传递过程有被污染可能(现在很多传菜都是完全敞开的,食物很可能被污染)等特点。
技术实现思路
1、鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种能提高智能餐厅上餐效率的上餐装置。
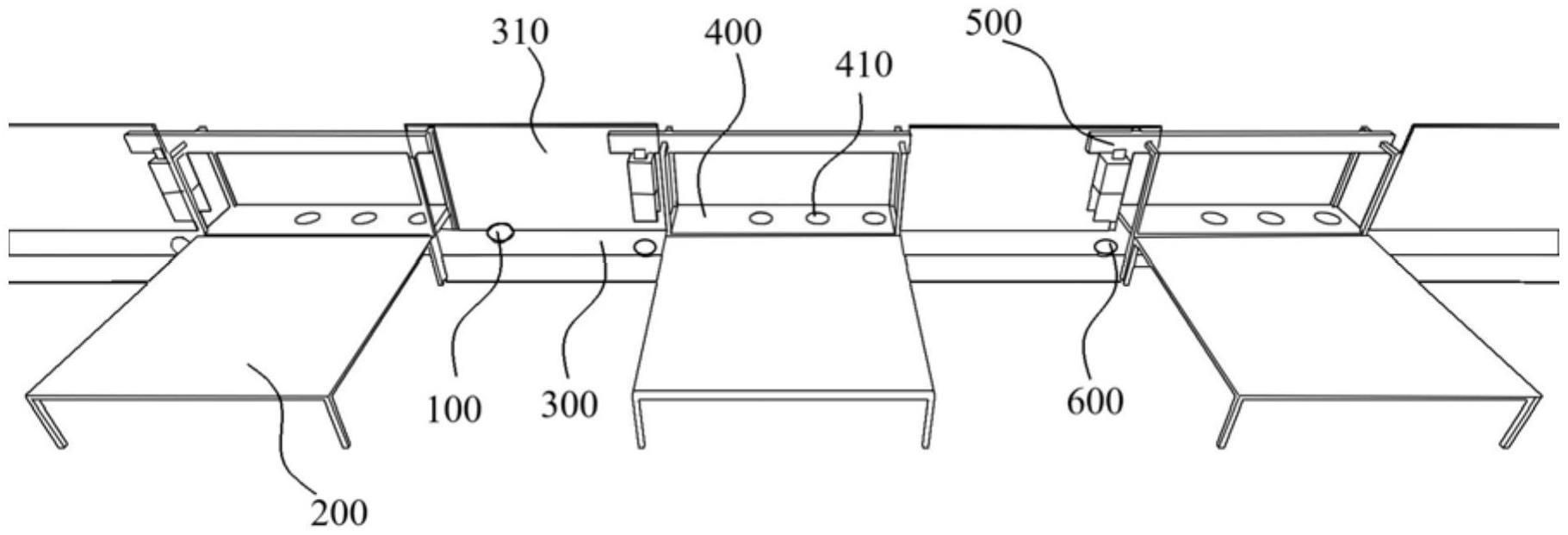
2、为实现上述目的及其他相关目的,本实用新型提供一种上餐装置,包括:
3、传送机构,用于将餐盘从厨房传送到就餐区;
4、餐桌,设于所述就餐区;
5、预存区,邻近所述餐桌设置,用于预存所述餐盘;
6、取餐机构,位于所述就餐区,用于将所述餐盘从所述传送机构转移至所述预存区。
7、在本实用新型的一可选实施例中,所述餐盘上设有智能标签,所述智能标签包含所述餐桌的编号信息。
8、在本实用新型的一可选实施例中,还包括用于识别所述智能标签的第一传感器,所述第一传感器设于所述传送机构的传送路径内,并与所述餐桌对应设置。
9、在本实用新型的一可选实施例中,所述预存区设有至少一个盘位。
10、在本实用新型的一可选实施例中,所述盘位处设有第二传感器,用于识别所述盘位的占用状态。
11、在本实用新型的一可选实施例中,所述取餐机构包括水平驱动元件、竖直驱动元件和机械手,所述机械手安装于所述竖直驱动元件上,所述竖直驱动元件安装于所述水平驱动元件上。
12、在本实用新型的一可选实施例中,所述传送机构的传送路径与所述水平驱动元件的运动路径在竖直方向上的投影存在至少一个交点。
13、在本实用新型的一可选实施例中,所述盘位设有多个,各所述盘位沿平行于所述水平驱动元件的运动路径的方向排列。
14、在本实用新型的一可选实施例中,其特征在于,还包括控制模块,所述控制模块根据所述第一传感器和所述第二传感器的检测信息控制所述取餐机构进行动作。
15、在本实用新型的一可选实施例中,所述传送机构沿所述传送路径设有防护装置。
16、本实用新型的技术效果在于增设了预存区和取餐机构,把传送过程和上餐过程进行分离。本装置通过传送机构将餐盘从厨房传送至用餐区域后,通过取餐机构将餐盘转移到预存区进行暂时存放,避免了由于某一餐桌的用餐者未及时取餐而导致错过取餐或无法进行下一餐桌的上餐。另外,本装置在传送机构上设有封闭装置以避免传送餐盘时菜品被污染的可能,可提高食品安全质量。
技术特征:
1.一种上餐装置,其特征在于,包括:
2.根据权利要求1所述的一种上餐装置,其特征在于,所述餐盘上设有智能标签,所述智能标签包含所述餐桌的编号信息。
3.根据权利要求2所述的一种上餐装置,其特征在于,还包括用于识别所述智能标签的第一传感器,所述第一传感器设于所述传送机构的传送路径内,并与所述餐桌对应设置。
4.根据权利要求3所述的一种上餐装置,其特征在于,所述预存区设有至少一个盘位。
5.根据权利要求4所述的一种上餐装置,其特征在于,所述盘位处设有第二传感器,用于识别所述盘位的占用状态。
6.根据权利要求4所述的一种上餐装置,其特征在于,所述取餐机构包括水平驱动元件、竖直驱动元件和机械手,所述机械手安装于所述竖直驱动元件上,所述竖直驱动元件安装于所述水平驱动元件上。
7.根据权利要求6所述的一种上餐装置,其特征在于,所述传送机构的传送路径与所述水平驱动元件的运动路径在竖直方向上的投影存在至少一个交点。
8.根据权利要求6所述的一种上餐装置,其特征在于,所述盘位设有多个,各所述盘位沿平行于所述水平驱动元件的运动路径的方向排列。
9.根据权利要求5所述的一种上餐装置,其特征在于,还包括控制模块,所述控制模块根据所述第一传感器和所述第二传感器的检测信息控制所述取餐机构进行动作。
10.根据权利要求3所述的一种上餐装置,其特征在于,所述传送机构沿所述传送路径设有防护装置。
技术总结
本技术涉及餐饮设施领域,具体涉及一种上餐装置,包括:传送机构,用于将餐盘从厨房传送到就餐区;餐桌,设于所述就餐区;预存区,邻近所述餐桌设置,用于预存所述餐盘;取餐机构,位于所述就餐区,用于将所述餐盘从所述传送机构转移至所述预存区。本技术的技术效果在于增设了预存区和取餐机构,把传送过程和上餐过程进行分离。本装置通过传送机构将餐盘从厨房传送至用餐区域后,通过取餐机构将餐盘转移到预存区进行暂时存放,避免了由于某一餐桌的用餐者未及时取餐而导致错过取餐或无法进行下一餐桌的上餐。另外,本装置在传送机构上设有封闭装置以避免传送餐盘时菜品被污染的可能,可提高食品安全质量。
技术研发人员:王逢源,杨尚轩
受保护的技术使用者:上海市杨浦区六一小学
技术研发日:20230307
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!