一种用于储物仓的仓门、储物仓及运输机器人的制作方法
本技术涉及运输机器人,更具体地说,它涉及一种用于储物仓的仓门、储物仓及运输机器人。
背景技术:
1、现有技术中,运输机器人的储物仓在侧面采用单侧开仓时,仓门行程长,滑动过程中容易出现卡涩、异响等问题。
技术实现思路
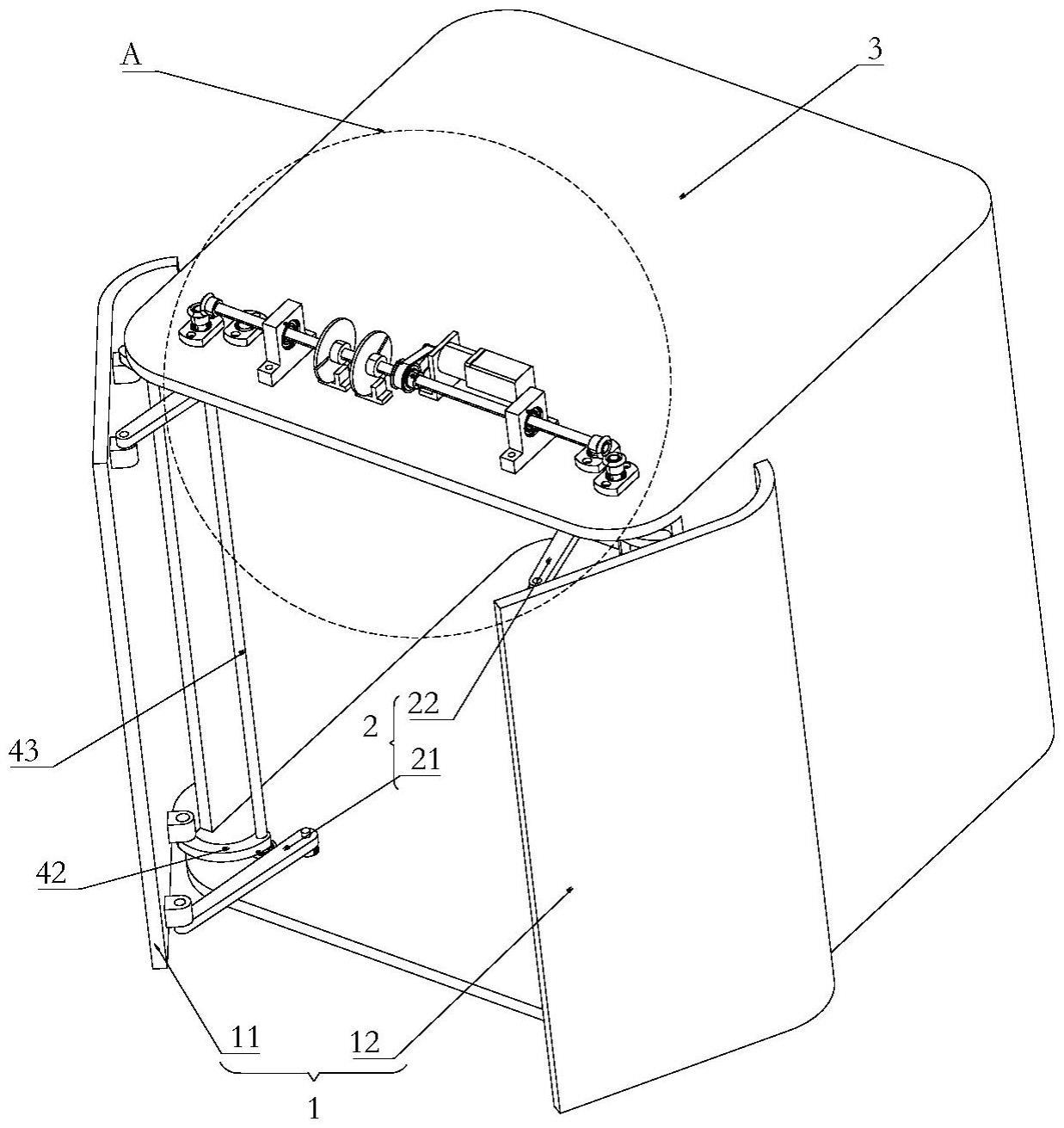
1、本实用新型的目的是提供一种用于储物仓的仓门、储物仓及运输机器人,仓门包括门板、连接杆和驱动机构,其中,门板由第一门板单元和第二门板单元组成,连接杆由第一杆体和第二杆体组成,第一门板单元通过第一杆体转动连接在储物仓一侧的仓壁上,第二门板单元通过第二杆体转动连接在储物仓另一侧的仓壁上,驱动机构用于驱动第一门板单元和第二门板单元转动,以打开或关闭储物仓的仓口。通过在仓口设置第一门板单元和第二门板单元,并通过驱动机构两侧开/闭仓口,达到缩短仓门行程,以降低滑动过程卡涩、异响出现几率的目的。
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:
3、一种用于储物仓的仓门,包括:门板,所述门板包括第一门板单元和第二门板单元;所述第一门板单元和第二门板单元用于分别设置在储物仓仓口的两侧;连接杆,所述连接杆包括第一杆体和第二杆体;所述第一杆体的一端与第一门板单元的内壁转动连接,所述第一杆体的另一端用于与储物仓仓壁的内侧转动连接;所述第二杆体的一端与第二门板单元的内壁转动连接,所述第二杆体的另一端用于与储物仓仓壁的内侧转动连接;驱动机构,所述驱动机构用于驱动第一门板单元和第二门板单元向靠近仓口的方向转动,以闭合仓口;或,驱动第一门板单元和第二门板单元向远离仓口的方向转动,以打开仓口。
4、进一步地,所述驱动机构包括驱动单元、第一连接件、第二连接件、第一转动轴和第二转动轴;所述第一转动轴和第二转动轴均转动设置在储物仓的仓壁上;其中,所述第一转动轴通过第一连接件与第一门板单元的内壁连接;所述第二转动轴通过第二连接件与第二门板单元的内壁连接;且,所述驱动单元的输出端与第一转动轴、第二转动轴均连接,用于分别驱动第一门板单元和第二门板单元转动。通过该结构,利用驱动单元驱动第一门板单元和第二门板单元同步转动,达到降低开/闭储物仓仓口过程中出错率的目的。
5、进一步地,所述驱动单元包括驱动电机、以及与驱动电机输出端连接的驱动轴;所述驱动轴用于转动设置在储物仓上;所述驱动轴的两端分别与第一转动轴和第二转动轴传动连接。通过该结构,达到利用驱动电机驱动第一门板单元和第二门板单元同步转动的目的。
6、进一步地,所述驱动单元还包括带座轴承;所述驱动轴过盈配合在带座轴承内;所述带座轴承用于固定在储物仓上。通过该结构,达到便于将驱动机构安装在储物仓上的目的。
7、进一步地,所述驱动轴上设置有码盘式传感器。
8、进一步地,所述驱动轴的两端均设置有第一锥齿轮;所述第一转动轴的端部设置有第二锥齿轮;所述第二转动轴的端部设置有第三锥齿轮;所述第二锥齿轮、第三锥齿轮用于分别与驱动轴两端上的第一锥齿轮啮合。通过该结构,达到实现驱动轴与第一转动轴、第二转动轴间传动连接的目的。
9、进一步地,所述驱动电机的输出端通过同步带与驱动轴连接。通过该结构,达到提高驱动机构稳定性的目的。
10、进一步地,所述连接杆与储物仓间采用销轴连接。通过该结构,达到便于使用者拆装门板的目的。
11、一种储物仓,储物仓的仓口设置有所述的仓门。
12、一种运输机器人,运输机器人上设置有所述的储物仓。
13、与现有技术相比,本实用新型具有以下有益效果:
14、一种用于储物仓的仓门、储物仓及运输机器人,仓门包括门板、连接杆和驱动机构,其中,门板由第一门板单元和第二门板单元组成,连接杆由第一杆体和第二杆体组成,第一门板单元通过第一杆体转动连接在储物仓一侧的仓壁上,第二门板单元通过第二杆体转动连接在储物仓另一侧的仓壁上,驱动机构用于驱动第一门板单元和第二门板单元转动,以打开或关闭储物仓的仓口。通过在仓口设置第一门板单元和第二门板单元,并通过驱动机构两侧开/闭仓口,达到缩短仓门行程,以降低滑动过程卡涩、异响出现几率的目的。
技术特征:
1.一种用于储物仓的仓门,其特征在于,包括:
2.根据权利要求1所述的仓门,其特征在于:
3.根据权利要求2所述的仓门,其特征在于:
4.根据权利要求3所述的仓门,其特征在于:
5.根据权利要求3或4中任一项所述的仓门,其特征在于:
6.根据权利要求3所述的仓门,其特征在于:
7.根据权利要求3所述的仓门,其特征在于:
8.根据权利要求1所述的仓门,其特征在于:
9.一种储物仓,其特征在于,储物仓(3)的仓口设置有如权利要求1-8中任一项所述的仓门。
10.一种运输机器人,其特征在于,运输机器人上设置有如权利要求9所述的储物仓(3)。
技术总结
本技术公开了一种用于储物仓的仓门、储物仓及运输机器人,涉及运输机器人技术领域,其技术方案要点是:一种用于储物仓的仓门、储物仓及运输机器人,仓门包括门板、连接杆和驱动机构,其中,门板由第一门板单元和第二门板单元组成,连接杆由第一杆体和第二杆体组成,第一门板单元通过第一杆体转动连接在储物仓一侧的仓壁上,第二门板单元通过第二杆体转动连接在储物仓另一侧的仓壁上,驱动机构用于驱动第一门板单元和第二门板单元转动,以打开或关闭储物仓的仓口。通过在仓口设置第一门板单元和第二门板单元,并通过驱动机构两侧开/闭仓口,达到缩短仓门行程,以降低滑动过程卡涩、异响出现几率的目的。
技术研发人员:曾翔宇
受保护的技术使用者:四川沃文特生物技术有限公司
技术研发日:20230316
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!