一种智能爬架串联式控制器的制作方法
本技术属于建筑设备,尤其涉及一种智能爬架串联式控制器。
背景技术:
1、爬架又称整体提升架,依照其动力来源可分为液压式、电动式、人力手拉式等主要几类。它能沿着建筑物往上攀升或下降,具有不必翻架子、免除了脚手架的拆装工序(一次组装后一直用到施工完毕)、不受建筑物高度的限制、安全可靠等优点,极大的节省了人力和材料,在高层建筑中极具发展优势。目前,在建筑工地上使用的爬架虽然说都实现了电动控制,但是控制器的功能还很单一,线路连接繁杂,针对性不强,只起到简单的控制爬架升降,并其在安装时通常是采用挂钩悬挂在防护网或者爬架的架体上,这样容易掉落或者被拿走。
技术实现思路
1、本实用新型针对上述现有技术的不足,发明了一种智能爬架串联式控制器。
2、为了实现上述目的,本实用新型采用如下的技术方案:
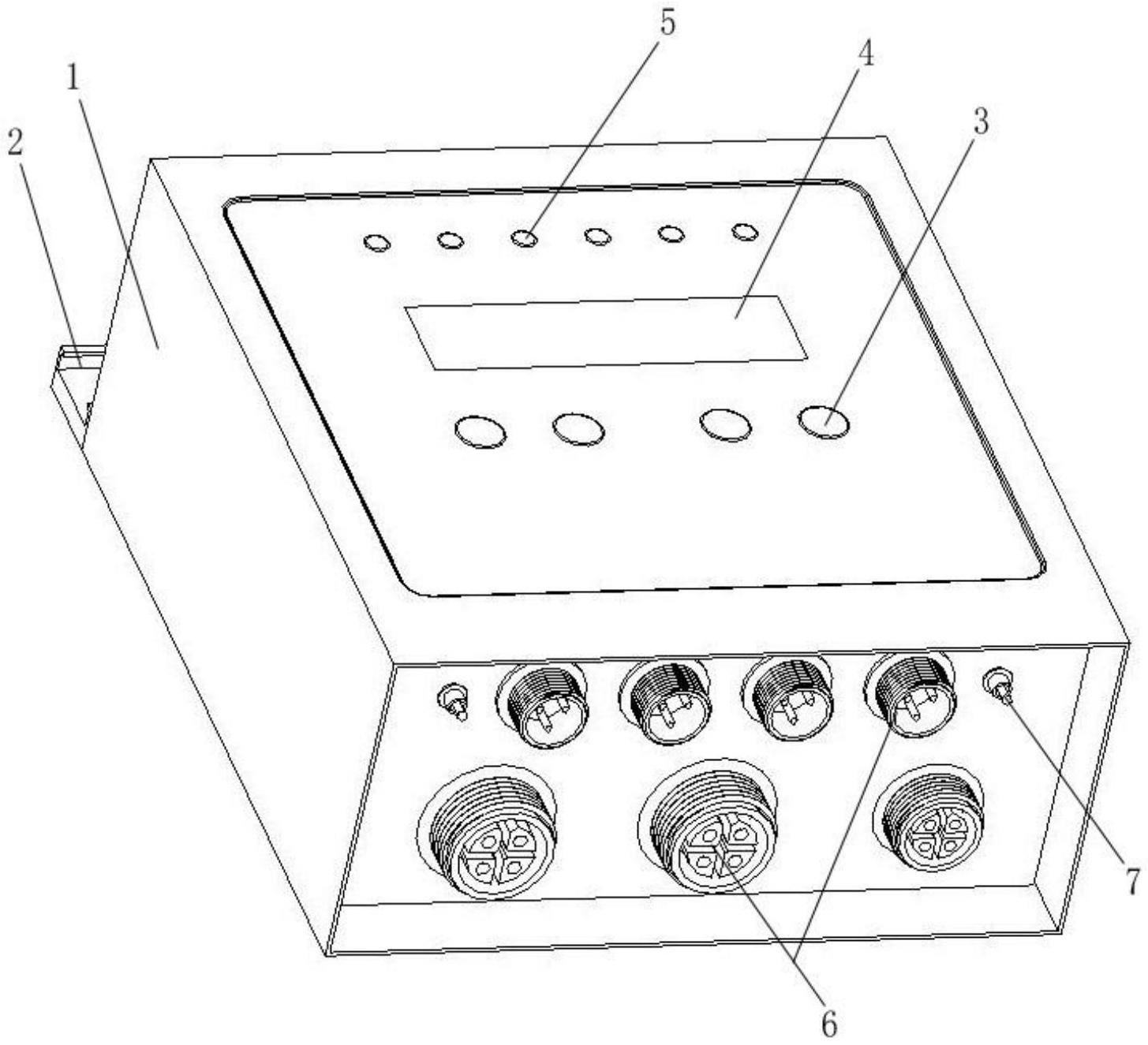
3、一种智能爬架串联式控制器,包括壳体、悬挂装置、控制按钮、显示屏、指示灯、连接插头、拨位开关和控制板;所述壳体的顶上设置有悬挂装置,所述悬挂装置包括靠板、移动板、齿条、齿轮、立柱、凹痕和避空槽,所述靠板固定设置在壳体的顶面上,靠板的背面与壳体的背面齐平;所述靠板正面的中心位置上可旋转设置有齿轮;所述移动板与齿条呈“7”型一体化设置构成松紧移动块;所述靠板的正面上以齿轮为中心对称设置有2个松紧移动块,2个松紧移动块上的齿条与齿轮啮合连接;所述移动板的背面上设置有立柱,立柱上设置有环形的凹痕;所述靠板上设置有用于穿过立柱的避空槽。
4、进一步,所述齿轮的正面上设置有旋转孔,所述旋转孔为多边形孔,可以根据多边形孔的形状设置相应的钥匙,只有通过对应的钥匙才能旋转齿轮进而实现对松紧移动块的调节。
5、进一步,所述壳体的底部设置有连接插头和拨位开关,所述连接插头设置有7个,分别为2个电源输入插头,1个葫芦电源输出插头,1个传感器数据线插头和3个通讯数据线插头;所述拨位开关设置有2个,分别为升降拨位开关和倒链拨位开关;在使用时可以根据需要连接相应的设备以扩增控制器的使用功能。
6、进一步,所述电源输入插头和通讯数据线插头的设置方式为串联式,电源输入插头和通讯数据线插头都分布设置有输入端和输出端,主要的作用是在控制器与控制器之间实现串联连接。
7、进一步,所述传感器数据线插头连接有重力传感器、温湿度传感器、风速传感器、高度传感器,可以根据工地的现场情况选择连接上传感器用于收集相应的数据。
8、进一步,所述控制板固定设置在壳体的内部,所述连接插头和拨位开关与控制板电性连接;所述控制板上还设置有控制按钮、显示屏和指示灯,所述控制按钮分别为菜单按钮、加/减按钮和退出按钮;显示屏中分区域显示有编号信息和载荷数值;指示灯分为电源、总控、自控、上升、下降和缺相指示灯。
9、进一步,所述控制板上还设置有报警模块、异常模块和数据收集模块,报警模块用于在控制器出现异常情况时发出报警信息或者声音,异常模块用于监测控制器的运行情况;数据收集模块用于通过连接的传感器收集相应的环境数据。
10、进一步,所述控制器设置有自控模式和总控模式,所述拨位开关在自控模式下使用,当某个控制器的通讯模块故障,不受主机控制时,切换到自控模式,通过手动进行升降操作;或者当爬架提升到位需要对葫芦进行倒链时,切换到自控模式,用手动进行倒链操作。
11、本实用新型的优点在于:1.本实用新型的控制器针对建筑工地的楼层智能爬架设计,主要用于控制电动葫芦的作业;通过控制器上电源输入插头和通讯数据线插头的串联式设计在安装时可以把多个控制器串联连接起来,避免了信号传输延迟、不顺畅、中断等情况的出现,同时,当某个控制器出现故障时可以很容易的检测到;2.控制器上设置有相对应的控制按钮和指示灯可以很直观明了的实现智能化操作与控制,还可以根据需要连接相应的传感器来获取环境数据;3.控制器在安装时采用悬挂装置固定安装在爬架的防护网上,通过旋转齿轮来调节移动板上两个立柱的间距来实现与防护网上孔洞的连接。
技术特征:
1.一种智能爬架串联式控制器,包括壳体(1)、悬挂装置(2)、控制按钮(3)、显示屏(4)、指示灯(5)、连接插头(6)、拨位开关(7)和控制板;其特征在于,所述壳体(1)的顶上设置有悬挂装置(2),所述悬挂装置(2)包括靠板(21)、移动板(22)、齿条(23)、齿轮(24)、立柱(25)、凹痕(26)和避空槽(27),所述靠板(21)固定设置在壳体(1)的顶面上,靠板(21)的背面与壳体(1)的背面齐平;所述靠板(21)正面的中心位置上可旋转设置有齿轮(24);所述移动板(22)与齿条(23)呈“7”型一体化设置构成松紧移动块;所述靠板(21)的正面上以齿轮(24)为中心中心对称设置有2个松紧移动块,2个松紧移动块上的齿条(23)与齿轮(24)啮合连接;所述移动板(22)的背面上设置有立柱(25),立柱(25)上设置有环形的凹痕(26);所述靠板(21)上设置有用于穿过立柱(25)的避空槽(27)。
2.根据权利要求1所述的一种智能爬架串联式控制器,其特征在于,所述齿轮(24)的正面上设置有旋转孔(28),所述旋转孔(28)为多边形孔。
3.根据权利要求2所述的一种智能爬架串联式控制器,其特征在于,所述壳体(1)的底部设置有连接插头(6)和拨位开关(7),所述连接插头(6)设置有7个,分别是2个电源输入插头,1个葫芦电源输出插头,1个传感器数据线插头和3个通讯数据线插头;所述拨位开关(7)设置有2个,分别为升降拨位开关和倒链拨位开关。
4.根据权利要求3所述的一种智能爬架串联式控制器,其特征在于,所述电源输入插头和通讯数据线插头的设置方式为串联式。
5.根据权利要求4所述的一种智能爬架串联式控制器,其特征在于,所述传感器数据线插头连接有重力传感器、温湿度传感器、风速传感器、高度传感器,可以根据工地的现场情况选择连接上传感器用于收集相应的数据。
6.根据权利要求5所述的一种智能爬架串联式控制器,其特征在于,所述控制板固定设置在壳体(1)的内部,所述连接插头(6)和拨位开关(7)与控制板电性连接;所述控制板上还设置有控制按钮(3)、显示屏(4)和指示灯(5)。
7.根据权利要求6所述的一种智能爬架串联式控制器,其特征在于,所述控制板上还设置有报警模块、异常模块和数据收集模块。
8.根据权利要求7所述的一种智能爬架串联式控制器,其特征在于,所述控制器设置有自控模式和总控模式,所述拨位开关(7)在自控模式下使用。
技术总结
本技术公开了一种智能爬架串联式控制器,包括壳体、悬挂装置、控制按钮、显示屏、指示灯、连接插头、拨位开关和控制板,壳体的面设置有控制按钮、显示屏和指示灯,壳体的底部设置有连接插头和拨位开关;壳体的顶上设置有悬挂装置,悬挂装置用于把控制器安装在防护网上。本技术的控制器针对建筑工地的楼层智能爬架设计,主要用于控制电动葫芦的作业;通过控制器上电源输入插头和通讯数据线插头的串联式设计在安装时可以把多个控制器串联连接起来,避免了信号传输延迟、不顺畅、中断等情况的出现,同时采用悬挂装置能否方便的安装在防护网上放置被他人取下。
技术研发人员:卢向阳,左仁锋,梁志明,陈卓睿,陆泽河,戴志海,苏以琨,刘良金,王真,张沛,黄涛,凌其峰,唐世平,陈海清,樊慧,韦程,农斌
受保护的技术使用者:广西巨邦科技有限公司
技术研发日:20230324
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!