一种自适应玻璃取料装置的制作方法
本技术涉及自动化搬运设备领域,具体涉及一种自适应玻璃取料装置。
背景技术:
1、在钙钛矿太阳能电池组件的生产过程中经常使用到封装玻璃。封装玻璃比较重,通过人工搬运,效率较低且较为麻烦。现有的玻璃搬运装置,抓取时无法同时适应水平堆叠和斜靠堆叠两种形式。另外,通过相机识别的方式实现玻璃的抓取定位,算法复杂,效率较低。
技术实现思路
1、本实用新型所要解决的技术问题在于,提供一种自适应玻璃取料装置,实现对不同堆叠方式的玻璃进行抓取和搬运。
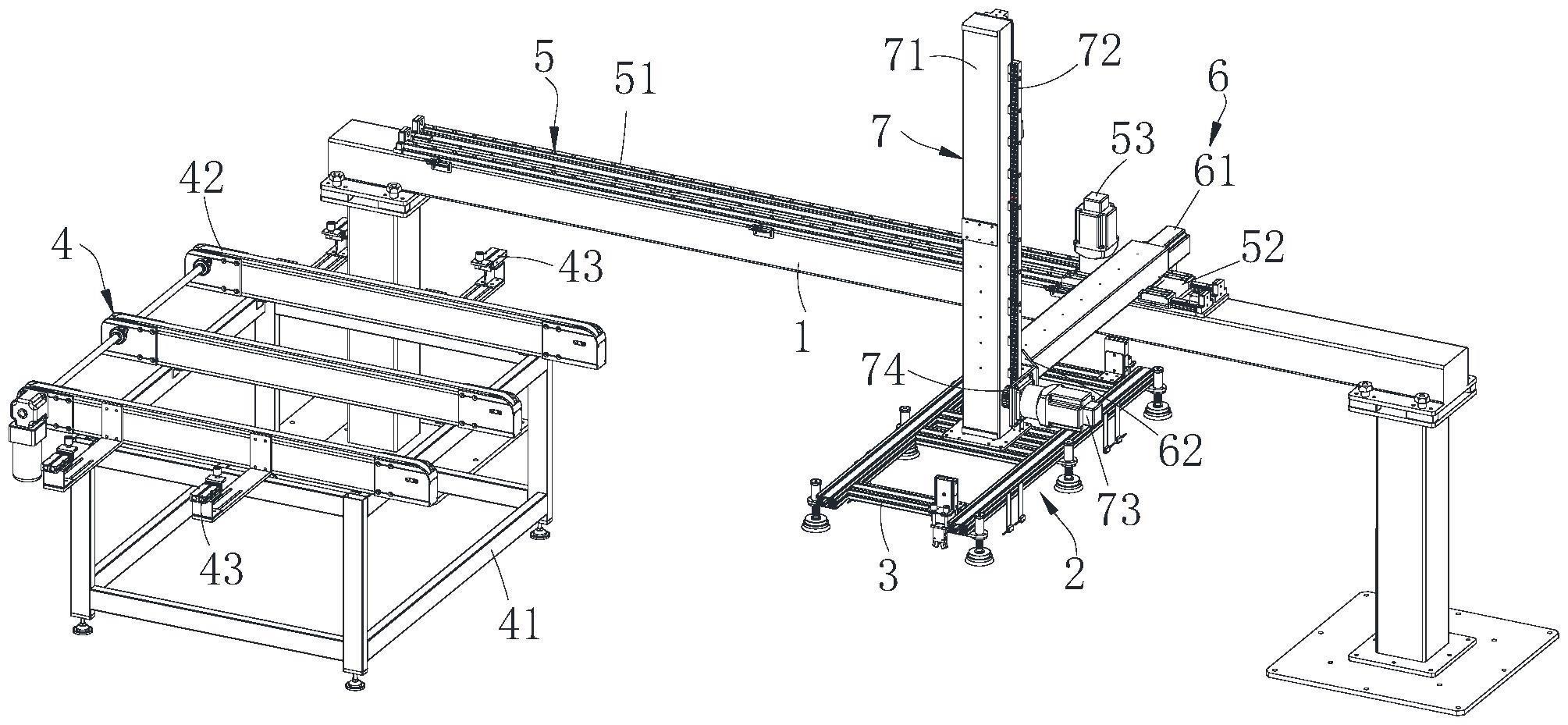
2、本实用新型是这样实现的,提供一种自适应玻璃取料装置,包括:龙门支架、输送机构和取料机构,在龙门支架的一侧分别设置放置待运输玻璃的玻璃堆放区和运输玻璃的传输台,取料机构安装在输送机构上用于抓取和放置玻璃,输送机构带动取料机构沿龙门支架的x方向往复移动,输送机构包括x轴移动组件、y轴旋转组件和z轴移动组件,取料机构设置在z轴移动组件上,z轴移动组件设置在y轴旋转组件上,y轴旋转组件设置在x轴移动组件上,x轴移动组件设置在龙门支架上;所述取料机构包括取料架以及设置在取料架上的吸盘、远距离传感器和近距离传感器,多个吸盘分别设置在取料架的底面边缘,远距离传感器和近距离传感器成对地设置在取料架的x方向的左右两侧边,远距离传感器和近距离传感器分别用于感知吸盘与玻璃堆放区内待抓取玻璃之间的距离。
3、进一步地,所述x轴移动组件包括x轴导轨、x轴齿条、x轴滑座、x轴电机、x轴齿轮,x轴导轨和x轴齿条分别固定在龙门支架上并沿龙门支架的x方向设置,x轴电机固定在x轴滑座上,x轴齿轮安装在x轴电机的输出轴上,x轴齿轮与x轴齿条相互啮合,x轴电机通过x轴齿轮与x轴齿条的啮合驱动x轴滑座沿x轴导轨往复移动。
4、进一步地,所述y轴旋转组件包括y轴旋转座和y轴旋转电机,y轴旋转电机固定在x轴滑座上,y轴旋转座设置在y轴电机的输出轴上,y轴电机带动y轴旋转座转动。
5、进一步地,所述z轴移动组件包括z轴梁、z轴导轨、z轴齿条、z轴滑座、z轴电机、z轴齿轮,z轴梁竖直设置,取料机构的取料架固定在z轴梁的底面,z轴导轨和z轴齿条分别固定在z轴梁上,z轴电机固定在y轴旋转座上,z轴齿轮安装在z轴电机的输出轴上,z轴齿轮与z轴齿条相互啮合,z轴电机通过z轴齿轮与z轴齿条的啮合驱动z轴导轨沿y轴旋转座上下升降。
6、进一步地,所述远距离传感器包括设置在取料架的左右两侧边的第一远距离传感器、第二远距离传感器、第三远距离传感器和第四远距离传感器,其中,第一远距离传感器和第二远距离传感器位于靠近传输台,对应地,第三远距离传感器和第四远距离传感器则远离传输台。
7、进一步地,所述近距离传感器包括设置在取料架的左右两侧边的第一近距离传感器、第二近距离传感器、第三近距离传感器和第四近距离传感器,其中,第一近距离传感器和第二近距离传感器位于靠近传输台,对应地,第三近距离传感器和第四近距离传感器则远离传输台。
8、进一步地,所述传输台包括输送支架以及设置在输送支架上的传送带和归正气缸,传送带设置在输送支架的顶部,至少一对归正气缸分别位于传送带的两侧部。
9、与现有技术相比,本实用新型的自适应玻璃取料装置,包括龙门支架、输送机构和取料机构,通过旋转电机、升降电机、输送电机分别实现y轴支架的转动、z轴支架的升降和取料机构在x轴支架上的平移,输送机构包括x轴移动组件、y轴旋转组件和z轴移动组件,取料机构设置在z轴移动组件上,z轴移动组件设置在y轴旋转组件上,y轴旋转组件设置在x轴移动组件上,x轴移动组件设置在龙门支架上。通过在取料架上设置多个吸盘、远距离传感器和近距离传感器,配合取料机构的旋转升降,对水平堆叠状态和斜靠堆叠状态的玻璃均能完成吸附抓取动作,最终实现玻璃的搬运。本实用新型适应性强,工作效率高,通过归正机构实现了玻璃的位置归正,保证玻璃运输的整齐和平稳。
技术特征:
1.一种自适应玻璃取料装置,其特征在于,包括龙门支架、输送机构和取料机构,在龙门支架的一侧分别设置放置待运输玻璃的玻璃堆放区和运输玻璃的传输台,取料机构安装在输送机构上用于抓取和放置玻璃,输送机构带动取料机构沿龙门支架的x方向往复移动,输送机构包括x轴移动组件、y轴旋转组件和z轴移动组件,取料机构设置在z轴移动组件上,z轴移动组件设置在y轴旋转组件上,y轴旋转组件设置在x轴移动组件上,x轴移动组件设置在龙门支架上;所述取料机构包括取料架以及设置在取料架上的吸盘、远距离传感器和近距离传感器,多个吸盘分别设置在取料架的底面边缘,远距离传感器和近距离传感器成对地设置在取料架的x方向的左右两侧边,远距离传感器和近距离传感器分别用于感知吸盘与玻璃堆放区内待抓取玻璃之间的距离。
2.如权利要求1所述的自适应玻璃取料装置,其特征在于,所述x轴移动组件包括x轴导轨、x轴齿条、x轴滑座、x轴电机、x轴齿轮,x轴导轨和x轴齿条分别固定在龙门支架上并沿龙门支架的x方向设置,x轴电机固定在x轴滑座上,x轴齿轮安装在x轴电机的输出轴上,x轴齿轮与x轴齿条相互啮合,x轴电机通过x轴齿轮与x轴齿条的啮合驱动x轴滑座沿x轴导轨往复移动。
3.如权利要求2所述的自适应玻璃取料装置,其特征在于,所述y轴旋转组件包括y轴旋转座和y轴旋转电机,y轴旋转电机固定在x轴滑座上,y轴旋转座设置在y轴电机的输出轴上,y轴电机带动y轴旋转座转动。
4.如权利要求3所述的自适应玻璃取料装置,其特征在于,所述z轴移动组件包括z轴梁、z轴导轨、z轴齿条、z轴电机、z轴齿轮,z轴梁竖直设置,取料机构的取料架固定在z轴梁的底面,z轴导轨和z轴齿条分别固定在z轴梁上,z轴电机固定在y轴旋转座上,z轴齿轮安装在z轴电机的输出轴上,z轴齿轮与z轴齿条相互啮合,z轴电机通过z轴齿轮与z轴齿条的啮合驱动z轴导轨沿y轴旋转座上下升降。
5.如权利要求1所述的自适应玻璃取料装置,其特征在于,所述远距离传感器包括设置在取料架的左右两侧边的第一远距离传感器、第二远距离传感器、第三远距离传感器和第四远距离传感器,其中,第一远距离传感器和第二远距离传感器位于靠近传输台,对应地,第三远距离传感器和第四远距离传感器则远离传输台。
6.如权利要求1所述的自适应玻璃取料装置,其特征在于,所述近距离传感器包括设置在取料架的左右两侧边的第一近距离传感器、第二近距离传感器、第三近距离传感器和第四近距离传感器,其中,第一近距离传感器和第二近距离传感器位于靠近传输台,对应地,第三近距离传感器和第四近距离传感器则远离传输台。
7.如权利要求1所述的自适应玻璃取料装置,其特征在于,所述传输台包括输送支架以及设置在输送支架上的传送带和归正气缸,传送带设置在输送支架的顶部,至少一对归正气缸分别位于传送带的两侧部。
技术总结
本技术涉及一种自适应玻璃取料装置,包括龙门支架、输送机构和取料机构,通过旋转电机、升降电机、输送电机分别实现Y轴支架的转动、Z轴支架的升降和取料机构在X轴支架上的平移,输送机构包括X轴移动组件、Y轴旋转组件和Z轴移动组件,取料机构设置在Z轴移动组件上,Z轴移动组件设置在Y轴旋转组件上,Y轴旋转组件设置在X轴移动组件上,X轴移动组件设置在龙门支架上。通过在取料架上设置多个吸盘、远距离传感器和近距离传感器,配合取料机构的旋转升降,对水平堆叠和斜靠堆叠的玻璃均能完成吸附抓取动作,最终实现玻璃的搬运。本技术适应性强,工作效率高,通过归正气缸实现了玻璃的位置归正,保证玻璃运输时的位置精度。
技术研发人员:请求不公布姓名
受保护的技术使用者:衢州纤纳新能源科技有限公司
技术研发日:20230324
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!