码垛机机械手以及码垛机的制作方法
本技术属于码垛机设备,具体涉及码垛机机械手以及码垛机。
背景技术:
1、在传统的企业生产过程中,货物一般都是通过人力进行搬运、包装,其效率低下且十分占用人力资源,近年来,不少企业都开始进行自动化升级以增强自身的市场竞争能力,通过采用码垛机代替人工进行货物的搬运,不仅解决了人力资源短缺的问题,也提高了企业的生产效率。
2、但是,现有码垛机的机械手在使用上具有夹持不牢固、夹具单一,导致被夹持的货物容易脱落、不适应多种规格垛板切换的问题。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种码垛机机械手以及码垛机,以解决现有技术的码垛机机械手在使用上具有夹持不牢固、导致被夹持的货物容易脱落、不适应多种规格垛板切换的问题。
2、本实用新型其中一方案提供了一种码垛机机械手,用于抓取放置货物的托盘,包括:
3、顶板;
4、抓取装置,包括至少两个抓手,所述抓手可移动设于所述顶板,所述抓手能够相互靠近,以对托盘进行抓取;
5、吸盘装置,设于所述顶板,所述吸盘装置用于对托盘朝向所述顶板的一侧施加吸力。
6、本实用新型以上方案所提供的一种码垛机机械手具有以下有益效果:
7、上述码垛机机械手,抓手可移动设于顶板上,抓手能够相对远离,扩大至大于托盘相对两侧部之间的距离,配合升降装置使抓手移动至托盘附近。抓手还能够相对靠近,收缩至对托盘的侧部或者底部施加作用力。码垛机机械手还能够通过吸盘装置对托盘的顶部施加吸力,实现多个方向上对托盘施加作用力进行夹持固定,使托盘能够牢固的固定于码垛机机械手,从而提高码垛机机械手的抓取稳定性。
8、在本实用新型其中一个优选方案中,所述抓取装置还包括驱动源件和移动杆,所述驱动源件与所述移动杆一端连接,所述移动杆可移动设于所述顶板,所述移动杆另一端与所述抓手连接,所述驱动源件能够通过驱动所述移动杆使所述抓手移动。
9、本实施例的驱动源件通过驱动移动杆使两个抓手相对远离,从而使抓手移动至能够在托盘侧部移动;驱动源件通过驱动移动杆使两个抓手相对靠近,从而使抓手能够完成对托盘的抓取。
10、在本实用新型其中一个优选方案中,所述顶板设有滑动通道,所述移动杆设于所述滑动通道内,所述移动杆能够在所述滑动通道内移动。
11、在本实用新型其中一个优选方案中,所述抓手包括l型杆,所述l型杆一端与所述移动杆连接,所述l型杆另一端能够随着所述移动杆移动伸入托盘底部。
12、在本实用新型其中一个优选方案中,所述抓手包括第一吸盘,所述第一吸盘与所述移动杆远离所述驱动源件的一端连接,所述第一吸盘能够随着所述移动杆移动从侧面靠近托盘。
13、本实施例的抓取装置还具有通过吸盘对托盘进行抓取的方案,当需要抓取侧面具有平面的托盘时,可以通过将抓取装置设置为吸盘的形式实现抓取,从而使得抓取装置能够适应多种适用环境。
14、在本实用新型其中一个优选方案中,所述吸盘装置的数量为多个,多个所述吸盘装置间隔设于所述顶板上;和/或,所述抓取装置的数量为多个,多个所述抓取装置间隔设于所述顶板上。
15、本实施例的码垛机机械手通过设置多个吸盘装置和抓取装置,进一步提高了码垛机机械手的抓取稳定性。
16、在本实用新型其中一个优选方案中,所述吸盘装置包括第二吸盘、驱动装置以及推杆组件,所述推杆组件一端与所述第二吸盘连接,所述推杆组件另一端与所述驱动装置连接,所述驱动装置能够通过所述推杆组件驱使所述第二吸盘靠近托盘。
17、本实施例的码垛机机械手在抓取装置完成对托盘的抓取后,吸盘装置能够也能够根据实际需要调节第二吸盘的位置,使第二吸盘能够紧密贴合于托盘,增强吸力。
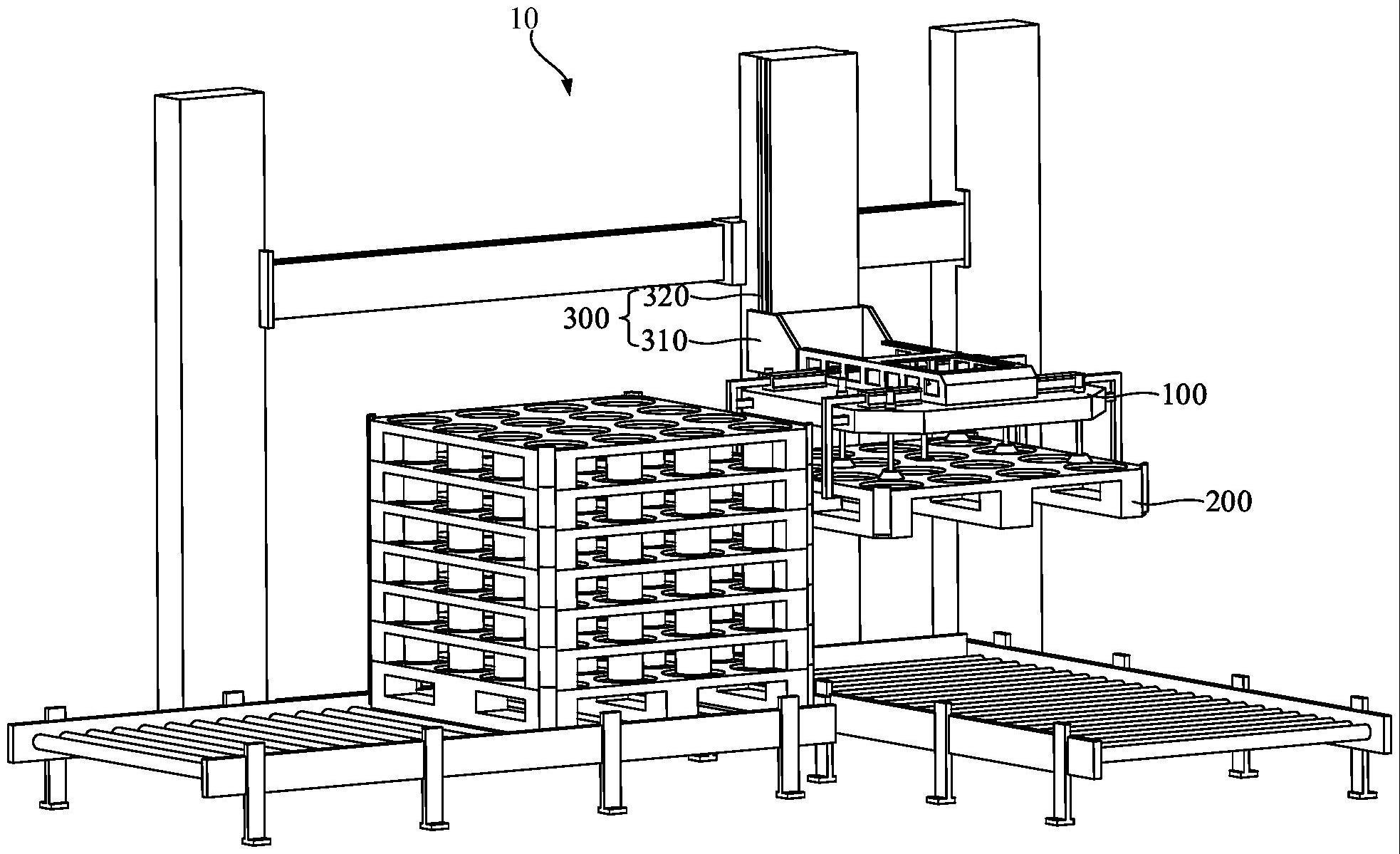
18、本实用新型还提供一种码垛机,包括:
19、上述任意一项实施例所述的码垛机机械手;以及,
20、托盘,用于放置货物;
21、移动装置,与所述顶板连接,所述移动装置用于驱动所述顶板位移。
22、在本实用新型其中一个优选方案中,所述托盘的相对两侧设有抓取槽,所述抓取槽与所述抓手相适配,以使所述抓手能够通过所述抓取槽抓取所述托盘。
23、本实施例的托盘即使放置于平台上,抓手也能够具有从托盘底部施加夹持力的空间,扩展了码垛机的应用环境。
24、在本实用新型其中一个优选方案中,所述托盘的数量为多个,所述托盘其一端面设有卡槽,所述托盘另一端面设有卡块,其中一个所述托盘的所述卡块能够卡合于另一所述托盘的所述卡槽,以使多个所述托盘相互堆叠。
25、本实施例通过多个托盘在闲置时相互堆叠,方便生产过程中对托盘进行搬运,减少托盘闲置时的占地面积。
技术特征:
1.一种码垛机机械手,用于抓取放置货物的托盘,其特征在于,包括:
2.如权利要求1所述的码垛机机械手,其特征在于,所述抓取装置还包括驱动源件和移动杆,所述驱动源件与所述移动杆一端连接,所述移动杆可移动设于所述顶板,所述移动杆另一端与所述抓手连接,所述驱动源件能够通过驱动所述移动杆使所述抓手移动。
3.如权利要求2所述的码垛机机械手,其特征在于,所述顶板设有滑动通道,所述移动杆设于所述滑动通道内,所述移动杆能够在所述滑动通道内移动。
4.如权利要求2所述的码垛机机械手,其特征在于,所述抓手包括l型杆,所述l型杆一端与所述移动杆连接,所述l型杆另一端能够随着所述移动杆移动伸入托盘底部。
5.如权利要求2所述的码垛机机械手,其特征在于,所述抓手包括第一吸盘,所述第一吸盘与所述移动杆远离所述驱动源件的一端连接,所述第一吸盘能够随着所述移动杆移动从侧面靠近托盘。
6.如权利要求1-5任意一项所述的码垛机机械手,其特征在于,所述吸盘装置的数量为多个,多个所述吸盘装置间隔设于所述顶板上;和/或,所述抓取装置的数量为多个,多个所述抓取装置间隔设于所述顶板上。
7.如权利要求1-5任意一项所述的码垛机机械手,其特征在于,所述吸盘装置包括第二吸盘、驱动装置以及推杆组件,所述推杆组件一端与所述第二吸盘连接,所述推杆组件另一端与所述驱动装置连接,所述驱动装置能够通过所述推杆组件驱使所述第二吸盘靠近托盘。
8.一种码垛机,其特征在于,包括:
9.如权利要求8所述的码垛机,其特征在于,所述托盘的相对两侧设有抓取槽,所述抓取槽与所述抓手相适配,以使所述抓手能够通过所述抓取槽抓取所述托盘。
10.如权利要求8所述的码垛机,其特征在于,所述托盘的数量为多个,所述托盘其一端面设有卡槽,所述托盘另一端面设有卡块,其中一个所述托盘的所述卡块能够卡合于另一所述托盘的所述卡槽,以使多个所述托盘相互堆叠。
技术总结
本技术属于码垛机设备技术领域,具体涉及码垛机机械手以及码垛机。其中,码垛机机械手用于抓取放置货物的托盘,包括:顶板、抓取装置以及吸盘装置,抓取装置包括至少两个抓手,抓手可移动设于顶板,抓手能够相互靠近,以对托盘进行抓取;吸盘装置设于顶板,吸盘装置用于对托盘朝向顶板的一侧施加吸力。本技术的优点在于,抓手能够相对远离,扩大至大于托盘相对两侧部之间的距离,抓手还能够相对靠近,收缩至对托盘的侧部或者底部施加作用力;还能够通过吸盘装置对托盘的顶部施加吸力,实现多个方向上对托盘施加夹持力进行夹持固定,使托盘能够牢固的夹持于码垛机机械手,从而提高码垛机机械手的抓取稳定性。
技术研发人员:吴深坚,高坤,潘建军,陈勇建
受保护的技术使用者:鹿啄泉矿泉水有限公司
技术研发日:20230328
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!