一种基于线控式底盘的机械臂垃圾拾取小车
本技术涉及垃圾清理,确切地说是一种基于线控式底盘的机械臂垃圾拾取小车,可以减少大中型公共空间垃圾清理和分类的人力资源的投入。
背景技术:
1、很多公共环境中每天都会产生很多垃圾,因此给垃圾清理带来了巨大的挑战和困难。
2、目前,对于产业园区、广场、公园、景区等城市的大中型公共空间来说,在传统人工+清洁设备的清洁模式下,其卫生环境将会面临四类问题。一是公共空间大,垃圾多样,地面复杂,对清洁设备的要求高;二是人力成本高,且供不应求;三是清洁效率低,效果难以保证;四是垃圾不能初步做到正确分类。尤其是第四类问题,在传统人工+清洁设备的清洁模式下,比如垃圾清理车对于垃圾的回收,一般是直接将垃圾桶中的垃圾倾倒至垃圾清理车箱体内部,各种类型的垃圾混在一起,无法做到初步分类,为后续分拣回收工作提高了难度,甚至可能会导致二次污染,进而导致产生更加严重的环境问题。
3、公布号为cn210887050u的中国实用新型专利,公开了一种环卫清洁小车,其技术内容为:一种环卫清洁小车,该环卫清洁小车通过摄像头寻找垃圾,并通过机械臂拾取,放置到自带的垃圾容器,当负载超过一定量时,发出警报,有效解决了草坪垃圾清理的问题,且高效卫生;其存在的技术问题是对于草坪上的垃圾只是做到了清理,其垃圾容器并没有对垃圾进行分类,不利于后期的垃圾处理。
4、公布号为cn210216271u的中国实用新型专利,公开了一种环保型人力环卫推车,其技术内容为:一种环保型人力环卫推车,包括车板、清扫辊、铲斗、垃圾箱、转盘和出水箱;车板前后两侧分别转动连接第一转轮和第二转轮,所述第一转轮通过一号同步的连接清扫辊,清扫辊转动连接于车板底部,清扫辊后部设置有铲斗,铲斗上方连通垃圾箱。其存在的技术问题是仍需清洁工人到达垃圾所在位置才可以对目标垃圾进行清理,对人力依赖较高,另外,该装置铲斗上方连通垃圾箱,即铲斗与清扫辊连接一端低,与垃圾箱连接一端高,在清扫过程中,质量较大的垃圾,如一些固体的废弃物不易通过清扫辊、铲斗进入垃圾箱,更需要人工辅助完成清理,所以垃圾清理效率较低。
技术实现思路
1、本实用新型要解决的技术问题是提供一种基于线控式底盘的机械臂垃圾拾取小车,该遥控小车用于提高垃圾清理效率,将低人力资源投入,解决垃圾分类的问题。
2、为解决上述技术问题,本实用新型采用如下技术手段:
3、一种基于线控式底盘的机械臂垃圾拾取小车,包括机械臂,箱体,隔板和线控式底盘,所述的机械臂和箱体设置在隔板上方,通过隔板与线控式底盘连接;所述的箱体外部设有两个投放垃圾的小门,通过小门为箱体内部的两个隔间,两个隔间中间由挡板分开;所述的线控式底盘,整个底盘的中间部分为控制系统,两个转向系统安置在控制系统的前后两侧,四个减震柱体分布于底盘的四个角;所述的控制系统,控制系统内部以整车控制器vcu为中心,前轮转向电机控制器和后轮转向电机控制器分别放置在整车控制器vcu的前后两侧,遥控器信号接收器、高压继电器和低压继电器依次放置在整车控制器vcu的左侧,机械臂电源箱和机械臂控制箱依次放置在整车控制器vcu的右侧。
4、通过设置小门,使本装置的箱体封闭性得到提升。控制系统内部各个部件之间通过电信号来传递信息,这种信息传递方式具有如下优点:优秀的实时性、信息传递稳定、控制精度高、受环境因素影响小和操作方便。控制系统采用电信号传递信息,便于实现整车控制器vcu和机械臂电源箱以及机械臂控制箱建立信息传递,完成对机械臂的控制。
5、采用上述技术方案的本实用新型,与现有技术相比,其突出的特点是:
6、本实用新型通过控制机械臂实现不同垃圾的收集,收集后分类投入箱体中不同隔间:可回收和不可回收分类,也可以设置更多隔间,更细致的分类,提高清洁效率;控制机械臂拾取,减轻了人力劳动。
7、转向系统内部的转向电机控制器具有对于电信号的接收十分灵敏,可以迅速对电信号作出反应,快速控制转向系统内部各部件完成指定转向动作。
8、进一步的优选技术方案如下:
9、所述的箱体前侧设置有两只平行摆放的机械臂,机械臂具有6个自由度,且与箱体之间留有足够机械臂运转的空间。两只机械臂,可以进一步方便垃圾拾取;所述的机械臂具有6个自由度。6自由度机械臂,重复定位精度高,对于所要拾取的垃圾的定位更加准确。
10、所述的转向系统,分为前轮转向系统和后轮转向系统,二者内部结构相同;前轮转向系统内部以转向电机为中心,转向电机以长度方向摆放,齿轮齿条转换器从转向电机宽度方向穿过,两端连接有拉杆,拉杆与轮胎中间连接有转向器。
11、所述的减震柱体共有4个,前轮转向系统的前侧与后轮转向系统的后侧各两个,安装于线控式底盘的两车架之间。
12、所述的线控式底盘设有上架、下架,上架、下架之间设有减震柱体;减震柱体的设置,有利于提高减震效果;所述的减震柱体共有4个,线控式底盘两端的前轮转向系统与后轮转向系统处各两个;设置4个减震柱体,减震效果更佳。
技术特征:
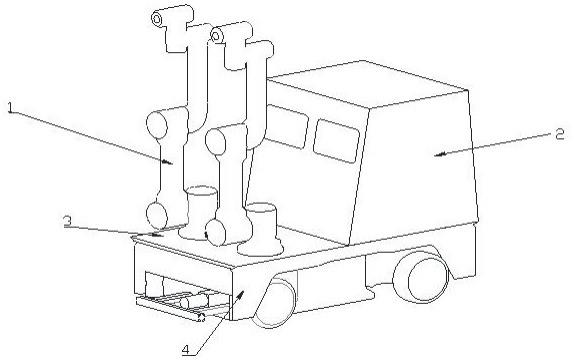
1.一种基于线控式底盘的机械臂垃圾拾取小车,包括机械臂(1),箱体(2),隔板(3)和线控式底盘(4),其特征在于:所述的机械臂(1)和箱体(2)设置在隔板(3)上方,通过隔板(3)与线控式底盘(4)连接;
2.根据权利要求1所述的基于线控式底盘的机械臂垃圾拾取小车,其特征在于:所述的箱体(2)前侧设置有两只平行摆放的机械臂(1),机械臂(1)具有6个自由度,且与箱体(2)之间留有足够机械臂(1)运转的空间。
3.根据权利要求1所述的基于线控式底盘的机械臂垃圾拾取小车,其特征在于:所述的转向系统(402),分为前轮转向系统和后轮转向系统,二者内部结构相同;前轮转向系统内部以转向电机(4021)为中心,转向电机(4021)以长度方向摆放,齿轮齿条转换器(4022)从转向电机(4021)宽度方向穿过,两端连接有拉杆(4023),拉杆(4023)与轮胎(4025)中间连接有转向器(4024)。
4.根据权利要求1所述的基于线控式底盘的机械臂垃圾拾取小车,其特征在于:所述的四个减震柱体(403),前轮转向系统的前侧与后轮转向系统的后侧各两个,安装于线控式底盘(4)的两车架之间。
技术总结
本技术公开了一种基于线控式底盘的机械臂垃圾拾取小车,小车由机械臂、箱体、隔板和线控式底盘构成,机械臂和箱体设置在隔板上方,线控式底盘设置在隔板下方,线控式底盘包括控制系统、转向系统和减震柱体,控制系统由整车控制器VCU4、前轮转向电机控制器、后轮转向电机控制器、遥控器信号接收器、高压继电器、低压继电器、机械臂电源箱和机械臂控制箱组成。转向系统由转向电机、齿轮齿条转换器、拉杆、转向器和轮胎组成;减震柱共有4个安装于线控式底盘的两车架之间。本技术将机械臂与线控式底盘结合在了一起,能够在人为操控下快速对目标范围内的垃圾进行拾取以及进行简单的初步分类,从而提高垃圾的清理效率。
技术研发人员:孙世豪,郭洪强,姜兆壮,刘美言,李威
受保护的技术使用者:聊城大学
技术研发日:20230414
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!