一种用于件烟拆码垛的机器人夹具的制作方法
本技术涉及件烟拆码垛设备,更具体的说是涉及一种用于件烟拆码垛的机器人夹具。
背景技术:
1、拆码垛是指将原本整齐堆放在一起的货物进行分离和拆散,以便更好地对其进行分类、计数、盘点等操作。随着人工成本的不断增加,业务量的不断增长,拆码垛设备在件烟领域的应用越来越广泛。自动化的拆码垛设备可以很好地替代人工,有效地节省人工成本。
2、但是,现有的件烟拆码垛夹具,一方面,夹取不牢固,机械手在高速移动翻转的时候,容易甩掉;另一方面,一次抓取件烟数量较少,这样就会照成很大的浪费,夹具机械手数量都要增加,大大加大了成本,占用大的空间,大大增加了设备成本和场地面积。
3、因此,提供一种稳定、可靠和高效的用于件烟拆码垛的机器人夹具是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本实用新型提供了一种用于件烟拆码垛的机器人夹具,夹持牢固,同时增加抓取数量,提高工作效率。
2、为了实现上述目的,本实用新型采用如下技术方案:
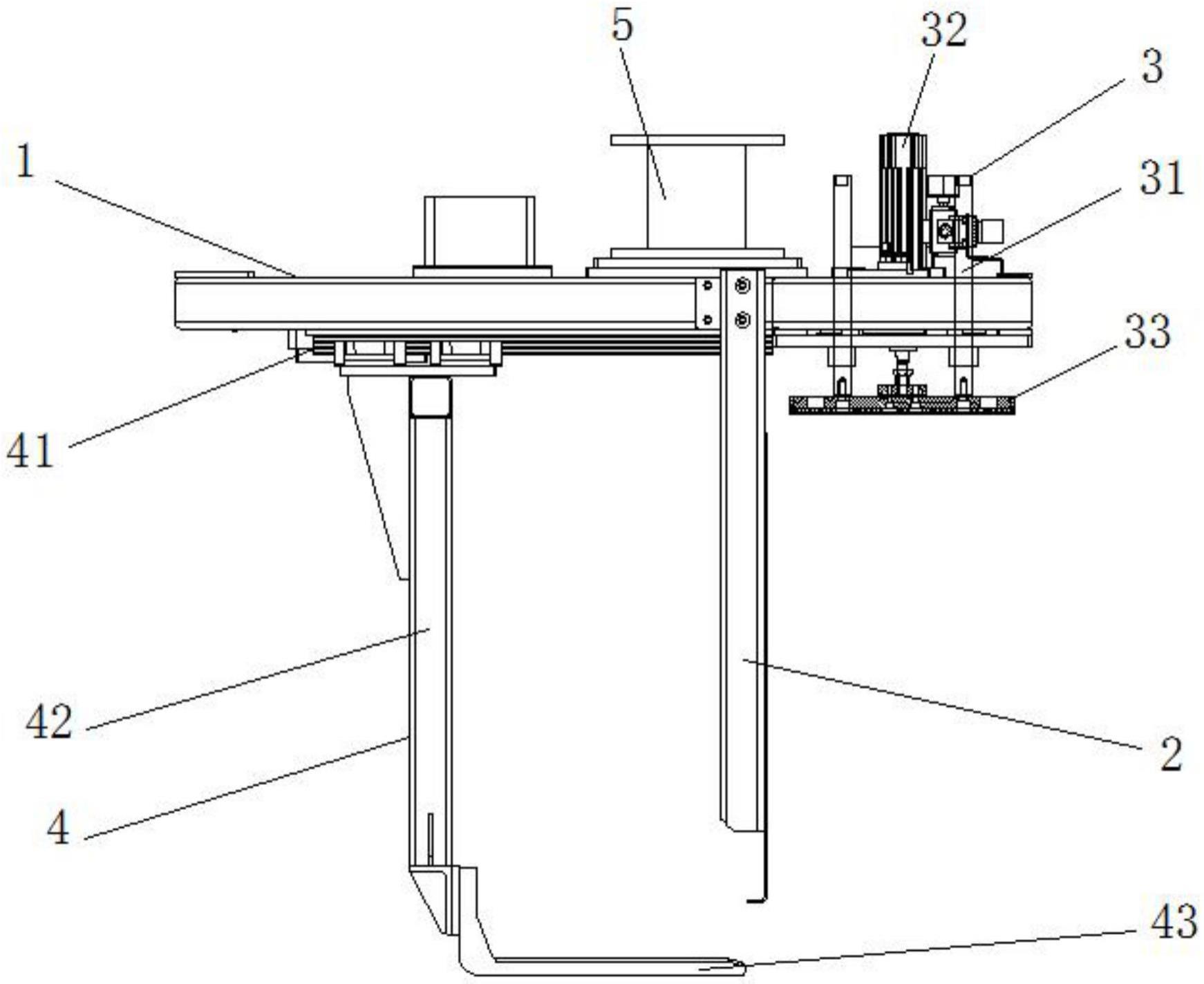
3、一种用于件烟拆码垛的机器人夹具,包括:
4、支撑架,所述支撑架的顶部固定有机械手连接座;
5、靠板,所述靠板竖直固定在所述支撑架底部靠近中央位置;
6、下压装置,所述下压装置包括升降机构、真空发生器和真空吸盘,所述升降机构和所述真空发生器均固定在所述支撑架上且位于所述靠板的一侧;所述真空吸盘固定在所述升降机构的底部;所述真空吸盘与所述真空发生器通过气管连接相通;
7、托持装置,所述托持装置包括平移机构、连接杆和托叉,所述平移机构安装在所述支撑架上且位于所述靠板另一侧;所述连接杆竖直固定在所述平移机构上;所述托叉水平固定在所述连接杆的底端。
8、通过采取以上方案,本实用新型的有益效果是:
9、靠板、真空吸盘和托叉三面对件烟进行固定,夹持稳固,避免机械手高度运动时掉落,同时三者之间形成较大的夹持空间,能够一次夹取数量较多的件烟,提高了工作效率。
10、进一步的,所述真空吸盘为海绵真空吸盘。
11、采用上述进一步的技术方案产生的有益效果为,适用于件烟搬运转移环境,避免夹持对件烟造成损坏。
技术特征:
1.一种用于件烟拆码垛的机器人夹具,其特征在于,包括:
2.根据权利要求1所述的一种用于件烟拆码垛的机器人夹具,其特征在于,所述真空吸盘为海绵真空吸盘。
技术总结
本技术公开了一种用于件烟拆码垛的机器人夹具,包括支撑架、靠板、下压装置和托持装置,支撑架的顶部固定有机械手连接座;靠板竖直固定在支撑架底部;下压装置包括升降机构、真空发生器和真空吸盘,升降机构和真空发生器均固定在支撑架上且位于靠板的一侧;真空吸盘固定在升降机构的底部;真空吸盘与真空发生器通过气管连接相通;托持装置包括平移机构、连接杆和托叉,平移机构安装在支撑架上且位于靠板另一侧;连接杆竖直固定在平移机构上;托叉水平固定在连接杆的底端。本技术靠板、真空吸盘和托叉三面对件烟进行固定,夹持稳固,避免机械手高度运动时掉落,同时三者之间形成较大的夹持空间,能够一次夹取数量较多的件烟,提高了工作效率。
技术研发人员:丁勇,曾岩,曾艺平
受保护的技术使用者:天海欧康科技信息(厦门)有限公司
技术研发日:20230426
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!