一种用于重载搬运的AGV机器人的制作方法
本技术涉及agv机器人,具体为一种用于重载搬运的agv机器人。
背景技术:
1、agv时当前最常见的应用如:agv搬运机器人或agv小车,主要功用集中在自动物流搬转运,agv搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,rfid引导等。
2、中国专利公开号:(cn217838271u)一种用于重载搬运的agv机器人,该用于重载搬运的agv机器人通过在底座的四角设置升降机,保证了重物在举升过程中的稳定性,使agv机器人具有装载重物的能力,提高了agv机器人的适用范围,满足了重负载的物料运输及仓储需求。
3、经申请人检索发现,上述专利还存在着一定的技术缺陷,例如上述专利当中的agv机器人在对货物进行装运时,需要将货物放置在agv机器人的上表面,当需要转运较重的货物时需要多人参与才能将货物放置在agv机器人上,操作麻烦,降低了对较重货物转运的效率,故而提出一种用于重载搬运的agv机器人,来解决上述技术问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种用于重载搬运的agv机器人,具备起吊货物等优点,解决了当需要转运较重的货物时需要多人参与才能将货物放置在agv机器人上的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种用于重载搬运的agv机器人,包括agv机器人本体,所述agv机器人本体的上表面固定有防护罩,所述agv机器人本体的上表面设置有用于起吊货物的吊装机构,所述agv机器人本体上设置有支撑组件;
3、其中,吊装机构包括倾斜组件和起吊组件,所述倾斜组件包括两个气缸,两个所述气缸均通过铰接轴铰接在agv机器人本体上表面的左右两侧,两个所述气缸平行设置,所述agv机器人本体的上表面通过螺栓固定有两个铰接座,两个所述铰接座的内部均通过铰接轴铰接有支撑杆,两个所述气缸的输出端分别通过铰接轴与两个支撑杆铰接。
4、进一步,两个所述铰接座分别与两个气缸位于同一直线上,两个所述支撑杆的运动轨迹均为弧形。
5、进一步,两个所述铰接座呈对称分布在agv机器人本体竖向中轴线的左右两侧。
6、进一步,所述起吊组件包括转动连接在两个支撑杆之间的转杆,左侧所述支撑杆的左侧固定有输出端与转杆固定连接的电机,所述转杆的外侧固定有两个收卷盘,所述收卷盘的外侧缠绕有拉绳,所述拉绳的一端与收卷盘固定连接,所述拉绳远离收卷盘的一端固定吊带。
7、进一步,左侧所述支撑杆的内部开设有供电机输出轴旋转并于其间隙配合的旋转通孔。
8、进一步,两个所述拉绳均为钢丝编制绳,两个所述收卷盘呈对称分布在转杆外表面的左右两侧。
9、进一步,所述支撑组件包括两个方管,两个所述方管的内部均活动套装有延伸杆,所述延伸杆下表面的后侧固定有竖杆,所述竖杆的下端面固定有万向轮,两个所述延伸杆相背的一侧均固定有限位块。
10、进一步,所述限位块与延伸杆的前端面平齐,所述延伸杆的宽度和高度分别与方管内腔的宽度和高度相适配。
11、与现有技术相比,本申请的技术方案具备以下有益效果:
12、1、该用于重载搬运的agv机器人,通过气缸的输出端伸出推动两个支撑杆倾斜,即可将两个吊带与货物连接,通过电机驱动转杆旋转将拉绳收卷,此时即可将货物吊起,然后操控气缸的输出端缩回即可将吊起的货物移动至agv机器人本体的上方,操控电机的输出端反向旋转即可将货物放置在agv机器人本体的上表面,有效的增加对货物转运的效率。
13、2、该用于重载搬运的agv机器人,通过设置防护罩可以有效的避免货物掉落,在吊装货物的时候通过将延伸杆从方管的内部拉出,通过万向轮和竖杆的支撑作用,即可有效的增加货物吊装时候的稳定性。
技术特征:
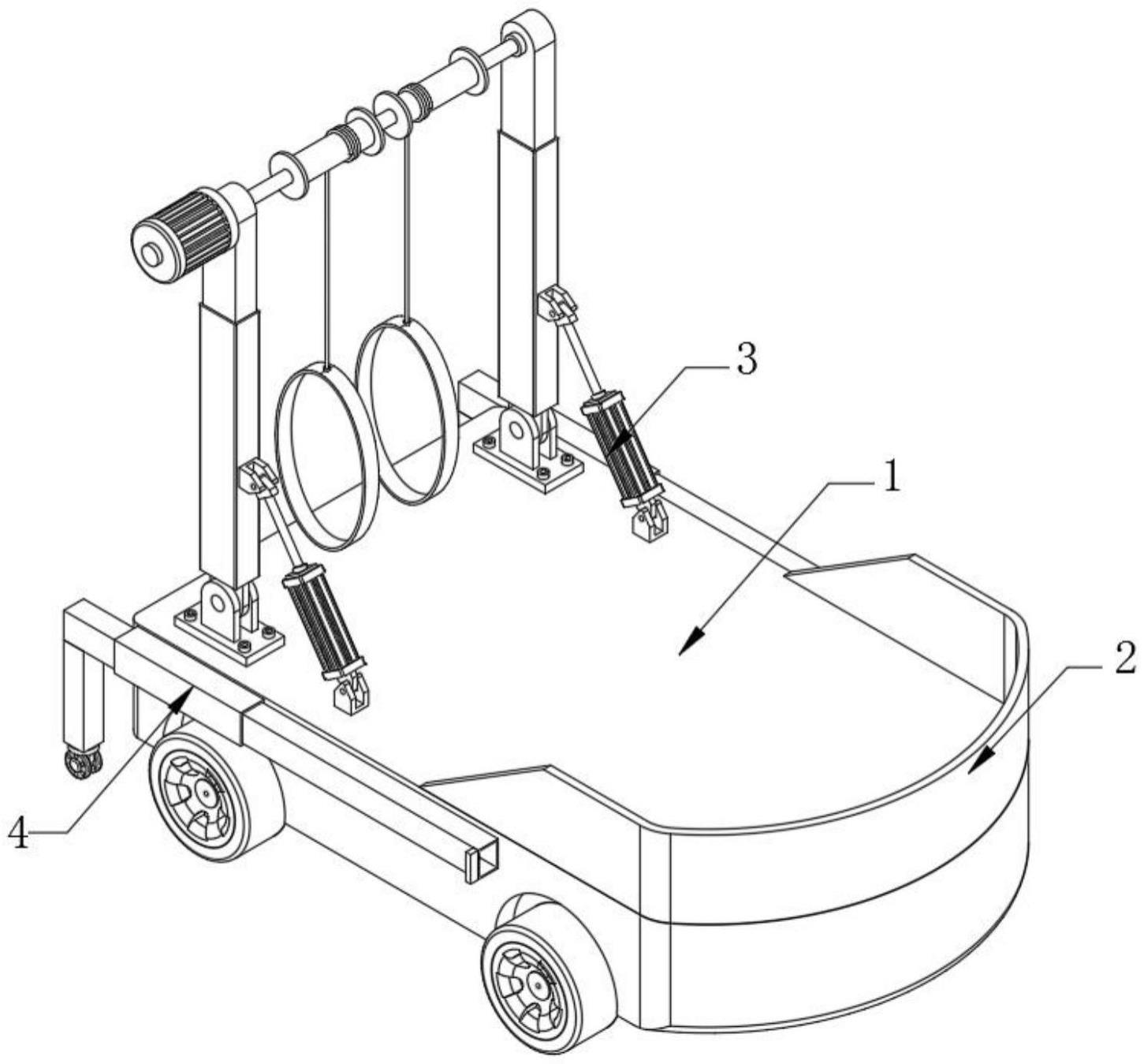
1.一种用于重载搬运的agv机器人,包括agv机器人本体(1),其特征在于:所述agv机器人本体(1)的上表面固定有防护罩(2),所述agv机器人本体(1)的上表面设置有用于起吊货物的吊装机构(3),所述agv机器人本体(1)上设置有支撑组件(4);
2.根据权利要求1所述的一种用于重载搬运的agv机器人,其特征在于:两个所述铰接座(302)分别与两个气缸(301)位于同一直线上,两个所述支撑杆(303)的运动轨迹均为弧形。
3.根据权利要求1所述的一种用于重载搬运的agv机器人,其特征在于:两个所述铰接座(302)呈对称分布在agv机器人本体(1)竖向中轴线的左右两侧。
4.根据权利要求1所述的一种用于重载搬运的agv机器人,其特征在于:所述起吊组件包括转动连接在两个支撑杆(303)之间的转杆(304),左侧所述支撑杆(303)的左侧固定有输出端与转杆(304)固定连接的电机(305),所述转杆(304)的外侧固定有两个收卷盘(306),所述收卷盘(306)的外侧缠绕有拉绳(307),所述拉绳(307)的一端与收卷盘(306)固定连接,所述拉绳(307)远离收卷盘(306)的一端固定吊带(308)。
5.根据权利要求4所述的一种用于重载搬运的agv机器人,其特征在于:左侧所述支撑杆(303)的内部开设有供电机(305)输出轴旋转并于其间隙配合的旋转通孔。
6.根据权利要求4所述的一种用于重载搬运的agv机器人,其特征在于:两个所述拉绳(307)均为钢丝编制绳,两个所述收卷盘(306)呈对称分布在转杆(304)外表面的左右两侧。
7.根据权利要求1所述的一种用于重载搬运的agv机器人,其特征在于:所述支撑组件(4)包括两个方管(401),两个所述方管(401)的内部均活动套装有延伸杆(402),所述延伸杆(402)下表面的后侧固定有竖杆(403),所述竖杆(403)的下端面固定有万向轮(404),两个所述延伸杆(402)相背的一侧均固定有限位块(405)。
8.根据权利要求7所述的一种用于重载搬运的agv机器人,其特征在于:所述限位块(405)与延伸杆(402)的前端面平齐,所述延伸杆(402)的宽度和高度分别与方管(401)内腔的宽度和高度相适配。
技术总结
本技术涉及一种用于重载搬运的AGV机器人,包括AGV机器人本体,所述AGV机器人本体的上表面固定有防护罩,所述AGV机器人本体的上表面设置有用于起吊货物的吊装机构,所述AGV机器人本体上设置有支撑组件,吊装机构包括倾斜组件和起吊组件,所述倾斜组件包括两个气缸。该用于重载搬运的AGV机器人,通过气缸的输出端伸出推动两个支撑杆倾斜,即可将两个吊带与货物连接,通过电机驱动转杆旋转将拉绳收卷,此时即可将货物吊起,然后操控气缸的输出端缩回即可将吊起的货物移动至AGV机器人本体的上方,操控电机的输出端反向旋转即可将货物放置在AGV机器人本体的上表面,有效的增加对货物转运的效率。
技术研发人员:李德辉
受保护的技术使用者:欧里湾(厦门)科技有限公司
技术研发日:20230506
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!