一种协作机器人双工位上料流水线的制作方法
本技术涉及生产线设计的,尤其涉及一种协作机器人双工位上料流水线。
背景技术:
1、自动化生产线中有些会使用到协作机器人进行某些工位的机械化操作,从流水线上取放物料是协作机器人的常用用途。有些厂家使用气吹式锁螺丝机进行流水线式自动化锁螺丝操作,流水线其主要包括产品上料输送线、锁螺丝机、协作机器人和产品下料输送线,其中,协作机器人负责从产品上料输送线将待锁螺丝的产品抓取并移动至锁螺丝机中,利用锁螺丝机进行锁螺丝操作后,再利用协作机器人将锁附好的产品转移至产品下料输送线进行下料;对于锁螺丝机,申请号为202210355037.0的专利公开一种螺丝机,其配置有用于放置将待锁螺丝的产品的承台,利用螺丝机锁附组件(包括螺丝刀)的驱动组件移动配合下,对产品进行各个螺丝孔位的锁螺丝操作;其中,流水线中的承台,功能仅仅是放置产品并限位产品,功能比较单一,由于一旦锁螺丝机的螺丝刀未对准产品的孔位就下沉将造成产品的损坏,故而该锁螺丝机着重对锁附组件进行配置进行众多传感器以提高精度,故而增加了设计成本,但其未对承台进行提高精度的额外设计,故而有待改进。对于协作机器人,协作机器人通常一个一个抓取至锁螺丝对应的放置位上,效率有待提高。
技术实现思路
1、为了解决现有技术的不足,本实用新型提供一种协作机器人双工位上料流水线,其结构简单,利用协作机器人实现将待锁螺丝的工件高效转移到载具上定位,并在载具上设计与工件的各个锁螺丝孔位相应的限位通孔,利用限位通孔从而可辅助锁螺丝机的高精度锁附操作。而本实用新型的锁螺丝机本身无需配置高精度部件,从而降低设计成本。
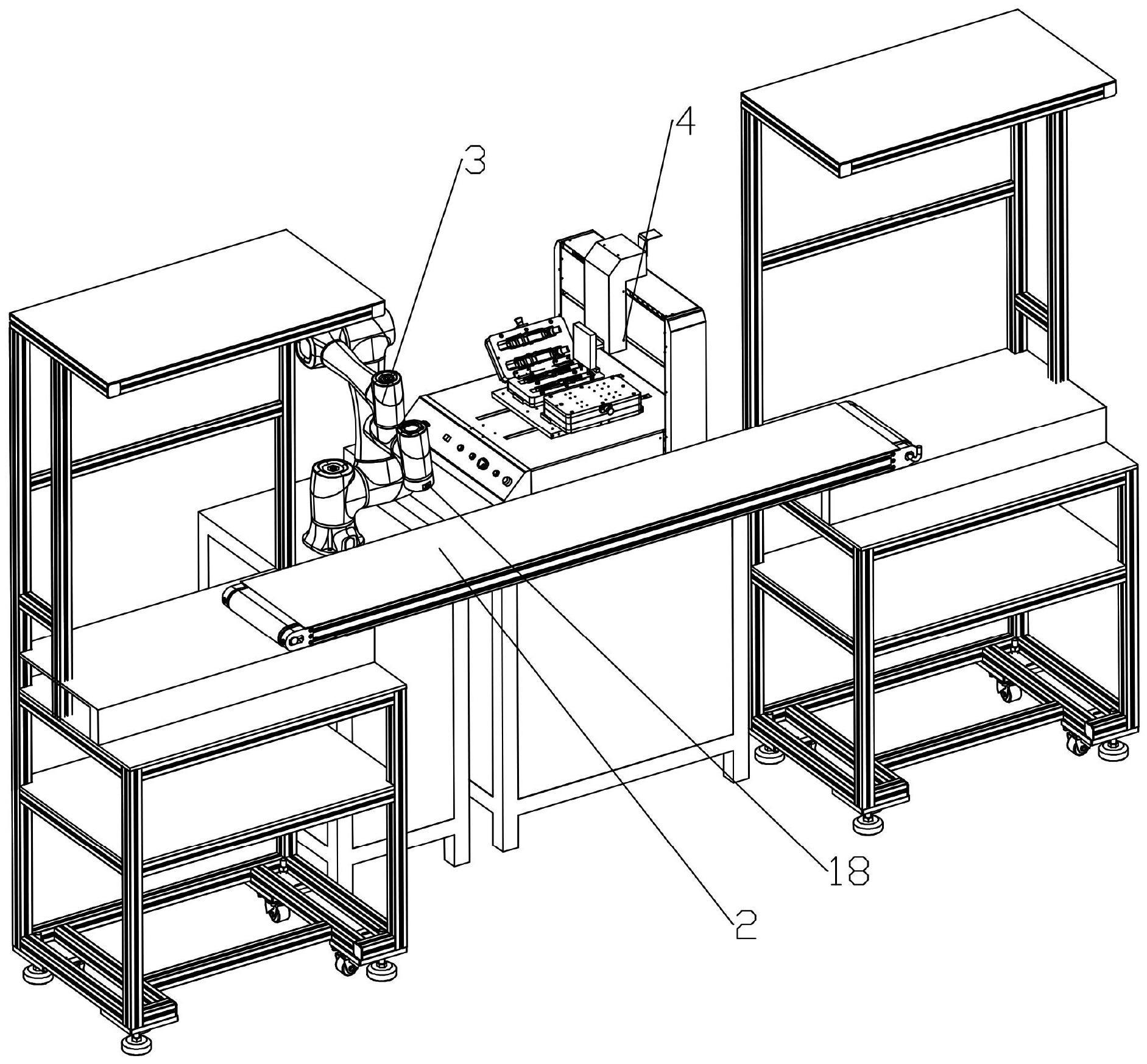
2、本实用新型要解决的技术问题是通过以下技术手段来实现的:一种协作机器人双工位上料流水线,包括用于输送工件且水平布置的传送带以及分别设置在所述传送带的后方的左右两侧的协作机器人和锁螺丝机,所述传送带的前后两侧外部对称设置有止停模块,所述止停模块包括位置靠左的两套笔形气缸、位于两套所述笔形气缸之间的第一光电传感器、位置靠右的止挡条和位于止挡条的左侧的第二光电传感器,两套所述笔形气缸的输出轴分别为平行设置且伸缩状态始终相反的第一轴和第二轴,所述第一轴和所述第二轴均可伸出至所述传送带的上方,所述止挡条的一端位于所述传送带的上方,所述锁螺丝机包括机台、设置在所述机台上的用于适配放置所述工件的载具和设置在所述载具的上方的用于锁螺丝的锁附组件,所述载具包括底座和翻盖,所述底座的上部和所述翻盖的下部共同形成有两个与所述工件相适配的放置腔体,两个所述放置腔体对称设置,所述翻盖上设置有若干与所述工件的待锁螺丝位置相对应的限位通孔,所述协作机器人包括双工位夹爪机械手,所述双工位夹爪机械手用于在所述传送带和所述载具的两个所述放置腔体之间取放转移所述工件。
3、在上述方案中,传送带用于运输工件,多个工件在传送带上进行排列整齐或不整齐地进行输送,第一轴和第二轴可交替伸出至传送带上,两套笔形气缸均受到本实用新型内置的控制器的驱动控制,双工位夹爪机械手也电连接并受到控制器的驱动控制,第一光电传感器用于感应第二轴处的工件,第二光电传感器用于感应止挡条处的工件,第一光电传感器和第二光电传感器也电连接控制器;所述第一轴靠近所述传送带的初始端,所述第二轴远离所述传送带的初始端,初始时,第二轴伸出进入传送带中时,并可对传送带上的一个工件进行阻挡,阻挡后,第一光电传感器检测到工件位于第二轴处,此时,第一轴和第二轴立即交替变化伸出伸入状态,即第二轴回缩第一轴伸出,此时,工件脱离第二轴的阻挡继续运输至止挡条处,等待双工位夹爪机械手的抓取,同时,第一轴的伸出可对后续被输送过来的工件进行阻挡,免得另外的工件也来到止挡条处导致两个工件挨得太近而导致双工位夹爪机械手难以对工件进行取料,当有工件来到止挡条处时,第二光电传感器检测到工件位于止挡条处,此时,第一轴和第二轴立即又发生交替变化伸出伸入状态,使得被第一轴阻挡的工件可以流入到第二轴处;故而通过本实用新型的止停模块的设计下,第一轴和第二轴的搭配使用下,可以使得双工位夹爪机械手可以从容地进行对位于止挡条处的工件的抓取。在本实用新型中,双工位夹爪机械手可以一次取放两个工件,并对应放入载具的两个放置腔体中,可大大提高工作效率;工件上本身就预留有多个孔位,供后续进行锁螺丝操作;协作机器人可利用双工位夹爪机械手从传送带上将工件抓取并转移至载具处,并准确放入放置腔体中,工件被放入放置腔体上后,翻盖盖上可将工件稳固限制在放置腔体中,这样翻盖上的限位通孔就可以准确对位到工件的待锁螺丝的孔位了,后续锁附组件就可以对位限位通孔进行定位和锁螺丝,由于锁附组件需要先通过限位通孔再进入到工件的孔位处,这样如若发生锁附组件对位不准确的情况,锁附组件就不会接触到工件,继而不会对工件产生损坏。在本实用新型中,载具的设计一来可以为工件进行定位,二来可以利用限位通孔实现辅助锁附组件的定位对位,三来可以起到保护工件被失误损坏的效果。
4、在一种实施例中,所述止停模块包括罩设在所述笔形气缸、所述第一光电传感器和所述第二光电传感器的外部的安装罩体,所述止挡条的一端固定在安装罩体上内部。
5、在一种实施例中,第一光电传感器位于所述第一轴和所述第二轴之间且靠近所述第二轴。
6、在一种实施例中,所述传送带的侧部设置限位立板,所述限位立板上设置有两个穿孔,两个所述穿孔分别与所述第一轴和所述第二轴相适配,所述第一轴和所述第二轴均可透过所述穿孔穿出至所述传送带的上方,所述限位立板在所述第一光电传感器和所述第二光电传感器的检测头的对应处设置有通光孔。
7、在一种实施例中,所述限位立板的一端与所述传送带的初始端平齐,所述限位立板的另一端位于所述止挡条的前方。
8、在一种实施例中,所述双工位夹爪机械手包括抓料执行部,所述抓料执行部包括本体、设置在所述本体底部的滑轨和滑动设置在所述滑轨上的两组夹片组件,所述夹片组件包括两片夹片和用于驱动两片所述夹片相互靠近或远离的夹片驱动电机,所述夹片驱动电机设在所述本体上。
9、在上述方案中,夹片组件进行夹紧的结构是机械手的常规结构,本实用新型利用两组夹片组件实现抓料执行部可同时进行两个工件的取放的操作,提高效率。
10、在一种实施例中,所述翻盖的一侧设置有气动转动模块,所述气动转动模块包括气弹簧,所述气弹簧安装在所述翻盖和所述底座之间。
11、在上述方案中,气弹簧常见的用于翻转工件的结构,本实用新型使用气动驱动的气弹簧可实现简单地对翻盖进行盖上和打开的操作。
技术特征:
1.一种协作机器人双工位上料流水线,其特征在于,包括用于输送工件(1)且水平布置的传送带(2)以及分别设置在所述传送带(2)的后方的左右两侧的协作机器人(3)和锁螺丝机(4),所述传送带(2)的前后两侧外部对称设置有止停模块(5),所述止停模块(5)包括位置靠左的两套笔形气缸、位于两套所述笔形气缸之间的第一光电传感器(6)、位置靠右的止挡条(7)和位于止挡条(7)的左侧的第二光电传感器(8),两套所述笔形气缸的输出轴分别为平行设置且伸缩状态始终相反的第一轴(9)和第二轴(10),所述第一轴(9)和所述第二轴(10)均可伸出至所述传送带(2)的上方,所述止挡条(7)的一端位于所述传送带(2)的上方,所述锁螺丝机(4)包括机台(11)、设置在所述机台(11)上的用于适配放置所述工件(1)的载具(12)和设置在所述载具(12)的上方的用于锁螺丝的锁附组件(13),所述载具(12)包括底座(14)和翻盖(15),所述底座(14)的上部和所述翻盖(15)的下部共同形成有两个与所述工件(1)相适配的放置腔体(16),两个所述放置腔体(16)对称设置,所述翻盖(15)上设置有若干与所述工件(1)的待锁螺丝位置相对应的限位通孔(17),所述协作机器人包括双工位夹爪机械手(18),所述双工位夹爪机械手(18)用于在所述传送带(2)和所述载具(12)的两个所述放置腔体(16)之间取放转移所述工件(1)。
2.根据权利要求1所述的一种协作机器人双工位上料流水线,其特征在于:所述止停模块(5)包括罩设在所述笔形气缸、所述第一光电传感器(6)和所述第二光电传感器(8)的外部的安装罩体(19),所述止挡条(7)的一端固定在安装罩体(19)上内部。
3.根据权利要求1所述的一种协作机器人双工位上料流水线,其特征在于:第一光电传感器(6)位于所述第一轴(9)和所述第二轴(10)之间且靠近所述第二轴(10)。
4.根据权利要求1所述的一种协作机器人双工位上料流水线,其特征在于:所述传送带(2)的侧部设置限位立板(20),所述限位立板(20)上设置有两个穿孔(21),两个所述穿孔(21)分别与所述第一轴(9)和所述第二轴(10)相适配,所述第一轴(9)和所述第二轴(10)均可透过所述穿孔(21)穿出至所述传送带(2)的上方,所述限位立板(20)在所述第一光电传感器(6)和所述第二光电传感器(8)的检测头的对应处设置有通光孔(22)。
5.根据权利要求4所述的一种协作机器人双工位上料流水线,其特征在于:所述限位立板(20)的一端与所述传送带(2)的初始端平齐,所述限位立板(20)的另一端位于所述止挡条(7)的前方。
6.根据权利要求1所述的一种协作机器人双工位上料流水线,其特征在于:所述双工位夹爪机械手(18)包括抓料执行部(23),所述抓料执行部(23)包括本体(24)、设置在所述本体(24)底部的滑轨(25)和滑动设置在所述滑轨(25)上的两组夹片组件(26),所述夹片组件(26)包括两片夹片(27)和用于驱动两片所述夹片(27)相互靠近或远离的夹片驱动电机,所述夹片驱动电机设在所述本体(24)上。
7.根据权利要求1所述的一种协作机器人双工位上料流水线,其特征在于:所述翻盖(15)的一侧设置有气动转动模块,所述气动转动模块包括气弹簧(28),所述气弹簧(28)安装在所述翻盖(15)和所述底座(14)之间。
技术总结
本技术公开了一种协作机器人双工位上料流水线,其结构简单,利用协作机器人高效转移工件到载具上,利用载具的限位通孔从而可辅助锁螺丝机的高精度锁附操作。本技术要的技术方案为一种协作机器人双工位上料流水线,包括用于传送带、协作机器人和锁螺丝机,传送带外部对称设置有止停模块,止停模块包括两套笔形气缸、第一光电传感器、止挡条和第二光电传感器,两套笔形气缸的输出轴分别为第一轴和第二轴,锁螺丝机包括机台、载具和锁附组件,载具包括底座和翻盖,翻盖上设置有限位通孔,协作机器人包括双工位夹爪机械手,双工位夹爪机械手用于在传送带和载具的两个放置腔体之间取放转移工件。本技术涉及生产线设计的技术领域。
技术研发人员:侯宗玮,陈敏,张祖发,梁芳,赵世权
受保护的技术使用者:珠海市鸿玮自动化设备有限公司
技术研发日:20230513
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!