一种可灵活切换装车数量的装车机的制作方法
本技术涉及物料转运设备,具体是一种可灵活切换装车数量的装车机。
背景技术:
1、当前,大型物流企业及袋装物料生产类企业,例如水泥、化肥、粮食、饲料、橡胶生产厂商,每天会有大量的货物发运,人工装卸车与生产效率矛盾越来越大。由于货品繁重,工作强度大,危险系数高,招工困难,货品装车、卸车过程逐渐实现自动化及无人化,部分企业已推广装车机的使用。
2、装车机主要采用装车机器人控制抓取夹具,将输送机构上的产品抓取后,在运输车上码垛。
3、其中,抓取夹具是装车机上重要的自动化机构,抓取夹具可将输送过来的物料抓取后放置到指定位置,动作精准高效。为了提高装卸效率,通常一次性抓取多个产品,抓取夹具可抓取的产品数量比较固定。
4、但是,由于接收产品的接收装置尺寸不统一,可以容纳的产品数量也不统一,例如,有的运输车宽度可容纳三个产品,有的运输车宽度可容纳四个产品。抓取夹具设计为一次性抓取三个产品的结构后,便无法适用于四个产品宽度的运输车,使得在装车过程中需要切换多个位置来摆放产品,这样不仅降低了装车速度,同时增加了控制难度。有时,甚至采用更换装车机上抓取夹具的方式适应车厢宽度,不仅费时费力,而且在更换抓取夹具的过程中,容易损坏其中的零部件。
技术实现思路
1、针对上述内容记载的技术问题,本实用新型提供一种可灵活切换装车数量的装车机,无需更换抓取夹具,即可自动调整装车数量,节省了操作时间。
2、为了解决上述技术问题,本实用新型提供了如下的技术方案:
3、一种可灵活切换装车数量的装车机,包括装车机器人,装车机器人连接抓取夹具,所述抓取夹具包括支架,支架包括固定支架和活动支架,固定支架下部连接有一组或多组抓手,所述固定支架转动连接有活动支架,活动支架设置在固定支架的一端或两端,活动支架的下部连接有一组或多组抓手。
4、上述装车机器人的抓取夹具可自动调整抓取数量,具体的,抓取夹具的活动支架可相对于固定支架转动,固定支架上抓手数量不能满足产品抓取需求时,可将活动支架转动至与固定支架平行,其下部设置抓手,从而增加抓手数量,调整可抓取产品的数量,从而实现不拆卸抓取夹具的情况下,就能适用于不同尺寸型号的货车或货厢。
5、所述固定支架及活动支架通过翻转轴活动连接,翻转轴与固定支架转动连接,翻转轴与活动支架固定连接,所述翻转轴连接翻转动力机构。
6、具体的,所述翻转动力机构包括翻转直线动力装置,翻转直线动力装置输出端铰接有翻转连杆,翻转连杆连接第一传动轴,第一传动轴连接第一传动轮,第一传动轮通过传动带将动力传递给与翻转轴连接的第二传动轮。
7、所述第一传动轮、第二传动轮选用链轮,传动带选用链条。
8、所述第一传动轮连接第一传动带,第一传动带连接中间传动轮,中间传动轮连接第二传动带,第二传动带连接第二传动轮。
9、所述翻转直线动力装置选用翻转气缸或翻转电动缸。
10、所述每组抓手包括对称设置的两排卡爪,每排卡爪固定在一个安装架上,每个安装架对应连接一组抓取动力机构。
11、所述抓取动力机构包括抓取气缸,抓取气缸输出端铰接有抓取连杆,抓取连杆与抓取动作轴固定连接,抓取动作轴活动安装在支架上,抓取动作轴与安装架固定连接。
12、所述装车机器人的机械臂尾端设置有连接法兰,抓取夹具的固定支架顶部固定连接有连接支架,连接支架与连接法兰通过螺栓固定连接。装车机器人可实现上下、左右及转动等动作,从而灵活带动抓取夹具移动。
13、所述装车机器人安装在地轨上,装车机器人可沿地轨直线移动,从而使装车机器人灵活移动,适应较长的货车或货厢;所述地轨的一端设置有输送机,产品由输送机输送过来。
14、本实用新型所达到的有益效果是:
15、1、本实用新型的装车机,针对不同宽度的车厢,可灵活调整每次抓取的数量及自身宽度,避免拆卸更换其他型号的抓取夹具,并且避免多次调整装车方向,本实用新型可提高装车效率,并且适应性高,省时省力。
16、2、本实用新型的装车机结构完善,可实现全自动快速装车。
技术特征:
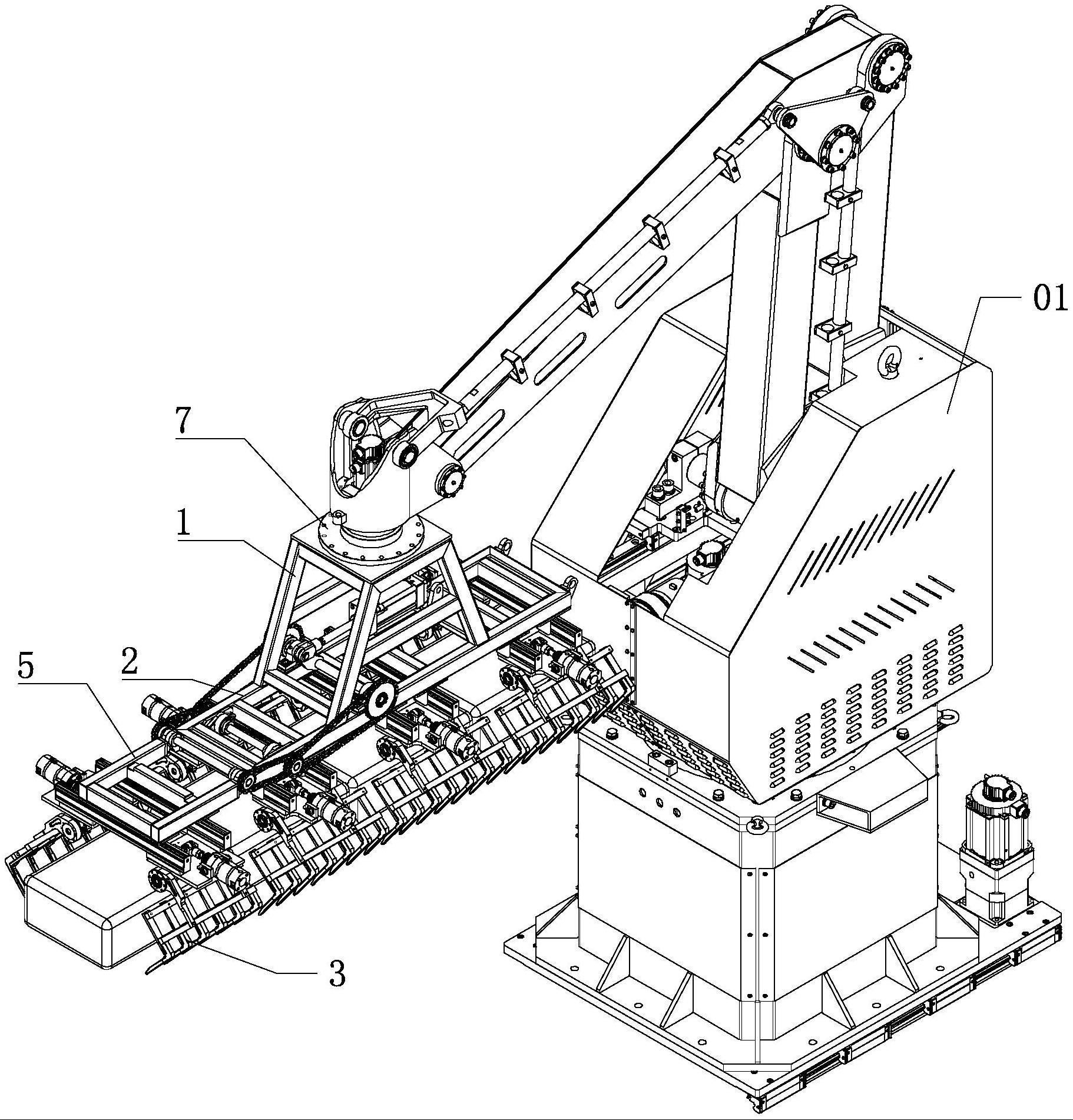
1.一种可灵活切换装车数量的装车机,其特征在于,包括装车机器人(01),装车机器人(01)连接抓取夹具(03),所述抓取夹具(03)包括支架,支架包括固定支架(2)和活动支架(5),固定支架(2)下部连接有一组或多组抓手,所述固定支架(2)转动连接有活动支架(5),活动支架(5)设置在固定支架(2)的一端或两端,活动支架(5)的下部连接有一组或多组抓手。
2.根据权利要求1所述的可灵活切换装车数量的装车机,其特征在于,所述固定支架(2)及活动支架(5)通过翻转轴(69)活动连接,翻转轴(69)与固定支架(2)转动连接,翻转轴(69)与活动支架(5)固定连接,所述翻转轴(69)连接翻转动力机构。
3.根据权利要求2所述的可灵活切换装车数量的装车机,其特征在于,所述翻转动力机构包括翻转直线动力装置(61),翻转直线动力装置(61)输出端铰接有翻转连杆(62),翻转连杆(62)连接第一传动轴(63),第一传动轴(63)连接第一传动轮(64),第一传动轮(64)通过传动带将动力传递给与翻转轴(69)连接的第二传动轮(68)。
4.根据权利要求3所述的可灵活切换装车数量的装车机,其特征在于,所述第一传动轮(64)、第二传动轮(68)选用链轮,传动带选用链条。
5.根据权利要求3或4所述的可灵活切换装车数量的装车机,其特征在于,所述第一传动轮(64)连接第一传动带(65),第一传动带(65)连接中间传动轮(66),中间传动轮(66)连接第二传动带(67),第二传动带(67)连接第二传动轮(68)。
6.根据权利要求5所述的可灵活切换装车数量的装车机,其特征在于,所述翻转直线动力装置(61)选用翻转气缸或翻转电动缸。
7.根据权利要求1所述的可灵活切换装车数量的装车机,其特征在于,所述每组抓手包括对称设置的两排卡爪(3),每排卡爪(3)固定在一个安装架(43)上,每个安装架(43)对应连接一组抓取动力机构。
8.根据权利要求7所述的可灵活切换装车数量的装车机,其特征在于,所述抓取动力机构包括抓取气缸(41),抓取气缸(41)输出端铰接有抓取连杆(42),抓取连杆(42)与抓取动作轴(44)固定连接,抓取动作轴(44)活动安装在支架上,抓取动作轴(44)与安装架(43)固定连接。
9.根据权利要求1所述的可灵活切换装车数量的装车机,其特征在于,所述装车机器人(01)的机械臂尾端设置有连接法兰(7),抓取夹具(03)的固定支架(2)顶部固定连接有连接支架(1),连接支架(1)与连接法兰(7)通过螺栓固定连接。
10.根据权利要求1所述的可灵活切换装车数量的装车机,其特征在于,所述装车机器人(01)安装在地轨(02)上,装车机器人(01)可沿地轨(02)直线移动,所述地轨(02)的一端设置有输送机(04)。
技术总结
本技术涉及物料转运设备技术领域,具体是一种可灵活切换装车数量的装车机,包括装车机器人,装车机器人连接抓取夹具,所述抓取夹具包括支架,支架包括固定支架和活动支架,固定支架下部连接有一组或多组抓手,所述固定支架转动连接有活动支架,活动支架设置在固定支架的一端或两端,活动支架的下部连接有一组或多组抓手。本技术的装车机,针对不同的车厢宽度,可灵活调整每次抓取的产品数量,避免拆卸更换其他抓取夹具,或者多次调整装车方向,本技术可提高装车效率,并且适应性高,省时省力。
技术研发人员:王方乾,李蓓蓓,王宇,张钦民,王方印,郭溢,李亚楠
受保护的技术使用者:山东蔚创智能科技有限公司
技术研发日:20230512
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!