一种光纤绕环机自动张力控制装置的制作方法
本技术属于光纤设备的,具体涉及一种光纤绕环机自动张力控制装置。
背景技术:
1、激光传输链路拥有传输带宽大、损耗小、质量轻、体积小、抗干扰等优点,越来越广泛地应用于各种信号传输场合,包括宽带、大动态射频信号的光链路传输;时钟、本振信号阵面光传输;射频信号光纤拉远和超宽带相控阵阵面光传输等。由于普通的相控阵天线存在“孔径渡越”效应,宽带宽角扫描下波束容易发生偏斜,降低系统的瞬时带宽;在实际应用中,为提高截获概率,要求电子对抗系统有较大的瞬时带宽,以便覆盖尽可能宽的频域范围。为解决该矛盾,微波相移技术被广泛应用于光控相控阵雷达中,其中一种行之有效的方法就是采用光学真延时,即用真延时线取代常规相控阵雷达中的移相器,采用光学方式控制波束形状。光延时系统在宽带、大动态射频光链路、时钟、本振信号光传输、射频光纤拉远和超宽带相控阵中均有广泛应用,而光纤环是光延时系统的重要组成部分。
2、光纤环在绕制过程中会有各种因素影响,国内光纤环的绕制大都采用人工绕制,缺少专用设备,无法保证其绕制质量;而目前一些光纤绕环机上使用的张力机构,其结构简单、使用重力控制,无反馈、张力控制精度低。
技术实现思路
1、本实用新型的目的在于针对现有技术中的上述不足,提供一种光纤绕环机自动张力控制装置,以解决现有光纤绕环机结构复杂、张力控制精度低的问题。
2、为达到上述目的,本实用新型采取的技术方案是:
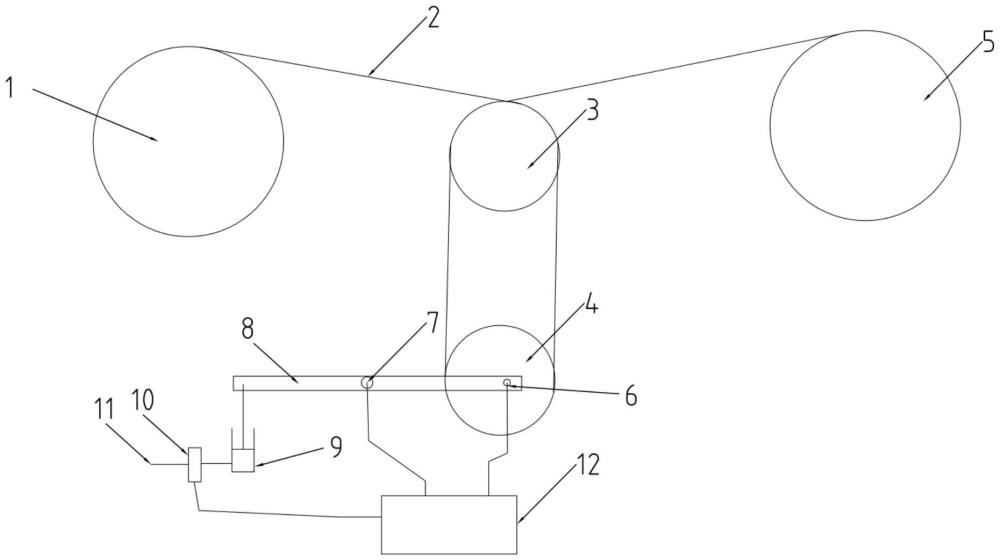
3、一种光纤绕环机自动张力控制装置,其包括放线盘、过线轮、张力轮和收线盘;放线盘将光纤放出,光纤依次缠绕所述过线轮的一侧、张力轮、过线轮的另一侧、最后收入收线盘中;
4、张力轮与摇臂的一端固定连接,摇臂的另一端与驱动组件相连;驱动组件驱动摇臂上下移动;摇臂和张力轮上分别安装角度传感器和张力传感器;驱动组件、角度传感器和张力传感器均与控制器电性连接。
5、进一步地,张力轮位于所述过线轮的正下方。
6、进一步地,摇臂上靠近驱动组件一端的下方设有支撑件。
7、进一步地,支撑件为三脚架,该三脚架的底部固定于地面,三脚架的顶部与摇臂铰接相连。
8、进一步地,驱动组件设置于摇臂的正下方,所述驱动组件包括气缸和电动压力调节阀;所述气缸的推杆与摇臂相连;所述电动压力调节阀安装于所述气缸的进气管道上,所述进气管道的入口与压缩空气入口连通。
9、进一步地,放线盘通过转动棍与第一旋转电机相连。
10、进一步地,收线盘通过转动棍与第二旋转电机相连。
11、本实用新型提供的光纤绕环机自动张力控制装置,具有以下有益效果:
12、本实用新型通过在张力轮上设置张力传感器,以实时采集张力轮上光纤的张力,并将该张力信息实时反馈至控制器中,以控制驱动组件控制摇臂摆动,以实现对张力轮上的光纤的反馈控制。
13、本实用新型结构简单,可实时反馈并控制光纤的张力,通过气缸进行力的驱动,以驱动摇臂摆动,并结合张力传感器,准确控制光纤传感器的张力,具有较强的实用性。
技术特征:
1.一种光纤绕环机自动张力控制装置,其特征在于:包括放线盘、过线轮、张力轮和收线盘;所述放线盘将光纤放出,光纤依次缠绕所述过线轮的一侧、张力轮、过线轮的另一侧、最后收入收线盘中;
2.根据权利要求1所述的光纤绕环机自动张力控制装置,其特征在于:所述张力轮位于所述过线轮的正下方。
3.根据权利要求1所述的光纤绕环机自动张力控制装置,其特征在于:所述摇臂上靠近驱动组件一端的下方设有支撑件。
4.根据权利要求3所述的光纤绕环机自动张力控制装置,其特征在于:所述支撑件为三脚架,该三脚架的底部固定于地面,三脚架的顶部与摇臂铰接相连。
5.根据权利要求1所述的光纤绕环机自动张力控制装置,其特征在于:所述驱动组件设置于摇臂的正下方,所述驱动组件包括气缸和电动压力调节阀;所述气缸的推杆与摇臂相连;所述电动压力调节阀安装于所述气缸的进气管道上,所述进气管道的入口与压缩空气入口连通。
6.根据权利要求1~5任一所述的光纤绕环机自动张力控制装置,其特征在于:所述放线盘通过转动棍与第一旋转电机相连。
7.根据权利要求1~5任一所述的光纤绕环机自动张力控制装置,其特征在于:所述收线盘通过转动棍与第二旋转电机相连。
技术总结
本技术公开了一种光纤绕环机自动张力控制装置,包括放线盘、过线轮、张力轮和收线盘;放线盘将光纤放出,光纤依次缠绕所述过线轮的一侧、张力轮、过线轮的另一侧、最后收入收线盘中;张力轮与摇臂的一端固定连接,摇臂的另一端与驱动组件相连;驱动组件驱动摇臂上下移动;摇臂和张力轮上分别安装角度传感器和张力传感器;驱动组件、角度传感器和张力传感器均与控制器电性连接。本技术结构简单,可实时反馈并控制光纤的张力,通过气缸进行力的驱动,以驱动摇臂摆动,并结合张力传感器,准确控制光纤传感器的张力,具有较强的实用性。
技术研发人员:张正涛,李应剑,吴春春,王燕伟,贾龙,罗建,曾刚杰
受保护的技术使用者:成都中住光纤有限公司
技术研发日:20230516
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!