一种装车机器人横移机构的制作方法
本技术涉及装车机横移设施,特别是一种装车机器人横移机构。
背景技术:
1、目前已有多款配制装车机器人的智能装车机,但从市场的反馈来看,这些装车机仍然不足之处:
2、1.装车机的横移机构无法匹配装车机器人;
3、2.装车机的横移机构配置简单的投料装置,投料姿态差、效率低,满足不了客户的要求;
4、基于以上多种原因,针对客户的迫切需求,现改进一款“装车机器人横移机构”,其与目前市面上的装车机的横移装置在结构和原理上有重大改进,更能满足客户对装车机的要求。
技术实现思路
1、本实用新型提供一种装车机器人横移机构的目的在于至少解决一个背景技术中提及的技术问题。
2、本实用新型采用如下技术方案实现实用新型目的:
3、一种装车机器人横移机构,包括框架装置,框架装置包括矩形的框架主体组件;所述框架主体组件上活动设有横移小车,横移小车的底部连接投料机械手,投料机械手活动连接投料器装置。
4、前述的装车机器人横移机构中,所述框架主体组件的两长边上设置有小车导轨;所述横移小车上设置有一组与小车导轨匹配的限位轮组。
5、前述的装车机器人横移机构中,所述框架主体组件的长边方向上连接有驱动齿条合件;所述横移小车底部连接驱动小车装置,驱动小车装置包括驱动齿轮,驱动齿轮与驱动齿条合件啮合。
6、前述的装车机器人横移机构中,所述横移小车的底部连接有一组承重轮组,一组承重轮组设置在框架主体组件上。
7、前述的装车机器人横移机构中,所述框架主体组件的中部向上连接有吊装架,吊装架的后部连接有升降联接板,前部于框架主体组件的上方连接有吸尘罩。
8、前述的装车机器人横移机构中,所述投料机械手包括联结底座,联结底座经上臂驱动组件转动连接上臂的上端,上臂的下端转动连接前臂的上端,前臂的上端连接前臂驱动组件,前臂的下端活动连接投料器装置。
9、前述的装车机器人横移机构中,所述联结底座包括底板,底板的底部两端各连接有一个安装耳;所述上臂驱动组件和前臂驱动组件分别设置于一个安装耳的外侧。
10、前述的装车机器人横移机构中,所述上臂和前臂的连接端经齿形链组件连接前臂驱动组件。
11、前述的装车机器人横移机构中,所述前臂的下端连接保持驱动组件,保持驱动组件连接旋转驱动组件,旋转驱动组件连接投料器装置。
12、前述的装车机器人横移机构中,所述横移小车上连接有激光测距装置。
13、有益效果
14、与现有技术相比,本实用新型将落料装置的横向行走功能、激光测距功能整进行了一体化设计,满足了装车机对车辆的测绘需求,降低整车成本;横移机构匹配装车机器人,实现装车机多角度、全方位的投料需求;横移机构的横向移动行程长,并使且左右两边的机械手可越中线行走,满足车厢内宽2.6米以下及围栏高2米及以下车辆投横竖料包的需要以及货车车厢前部有升降油缸装置的测量。通过本实用新型可保证装车机的投料高度、宽度和码垛效率,满足客户对效率的需求;准确完成落包工序,落包姿态优,料包不易滑移。
15、本实用新型装车机器人(投料机械手+投料器装置)悬挂在横移小车之上,集成升降、旋转和横移的多功能装置在一起,完成终端投料,具有可保证装车机的投料和码垛效率,满足客户对效率的需求;准确完成落包工序,落包姿态优,实现了装车机多角度、全方位的投料;故障率低,噪音小,运行非常平稳的优点;另外,经测试,投料机械手的装载负载力达到70kgf,抗冲击负载力达到100kgf,可靠性高。
技术特征:
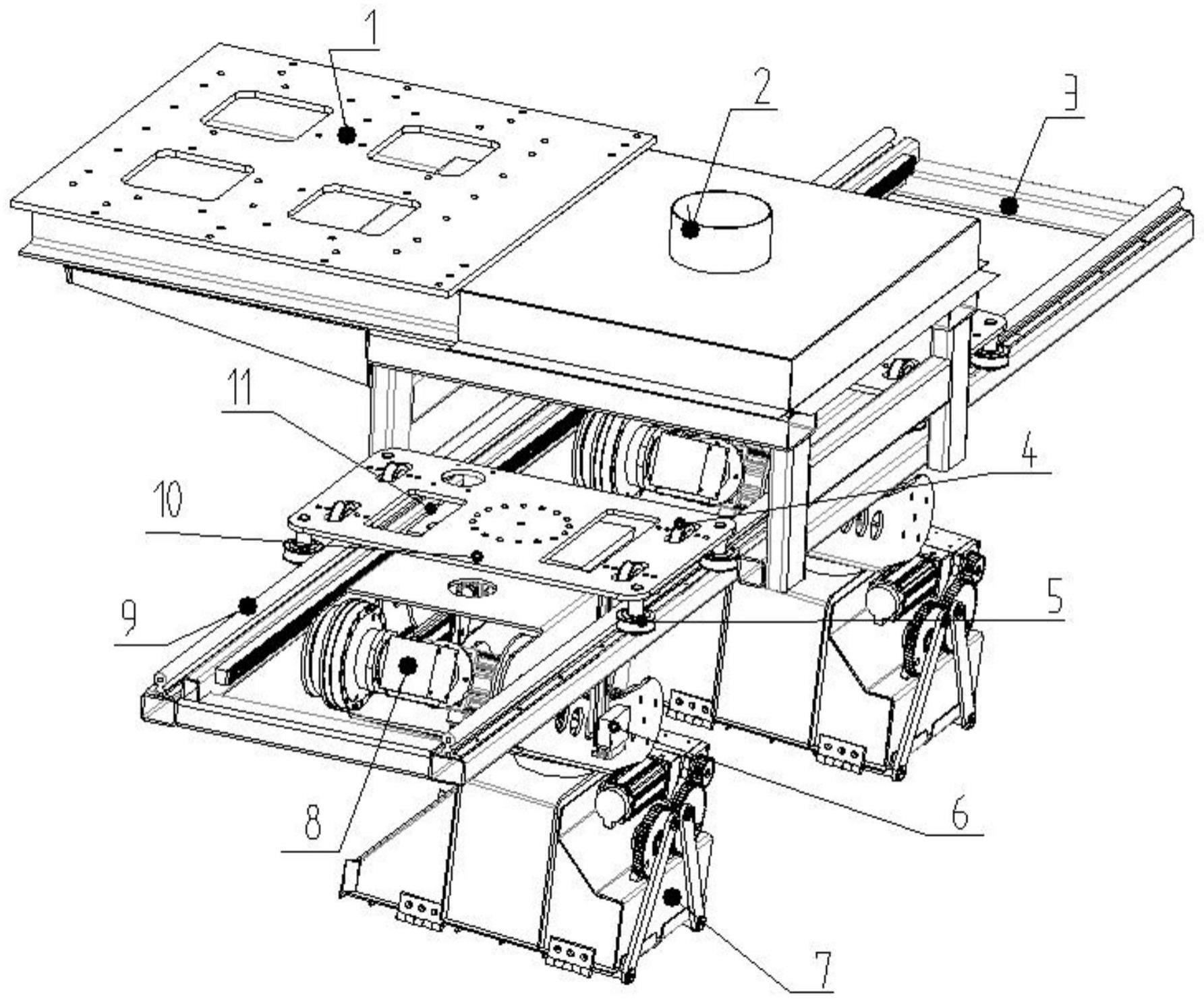
1.一种装车机器人横移机构,其特征在于:包括框架装置(3),框架装置(3)包括矩形的框架主体组件(33),框架主体组件(33)上活动设有横移小车(10),横移小车(10)的底部连接投料机械手(8),投料机械手(8)活动连接投料器装置(7)。
2.根据权利要求1所述的装车机器人横移机构,其特征在于:所述框架主体组件(33)的两长边上设置有小车导轨(9);所述横移小车(10)上设置有一组与小车导轨(9)匹配的限位轮组(5)。
3.根据权利要求1所述的装车机器人横移机构,其特征在于:所述框架主体组件(33)的长边方向上连接有驱动齿条合件(32);所述横移小车(10)底部连接驱动小车装置(11),驱动小车装置(11)包括驱动齿轮,驱动齿轮与驱动齿条合件(32)啮合。
4.根据权利要求1所述的装车机器人横移机构,其特征在于:所述横移小车(10)的底部连接有一组承重轮组(4),一组承重轮组(4)设置在框架主体组件(33)上。
5.根据权利要求1所述的装车机器人横移机构,其特征在于:所述框架主体组件(33)的中部向上连接有吊装架(31),吊装架(31)的后部连接有升降联接板(1),前部于框架主体组件(33)的上方连接有吸尘罩(2)。
6.根据权利要求1所述的装车机器人横移机构,其特征在于:所述投料机械手(8)包括联结底座(81),联结底座(81)经上臂驱动组件(82)转动连接上臂(83)的上端,上臂(83)的下端转动连接前臂(86)的上端,前臂(86)的上端连接前臂驱动组件(84),前臂(86)的下端活动连接投料器装置(7)。
7.根据权利要求6所述的装车机器人横移机构,其特征在于:所述联结底座(81)包括底板(811),底板(811)的底部两端各连接有一个安装耳(812);所述上臂驱动组件(82)和前臂驱动组件(84)分别设置于一个安装耳(812)的外侧。
8.根据权利要求7所述的装车机器人横移机构,其特征在于:所述上臂(83)和前臂(86)的连接端经齿形链组件(85)连接前臂驱动组件(84)。
9.根据权利要求8所述的装车机器人横移机构,其特征在于:所述前臂(86)的下端连接保持驱动组件(88),保持驱动组件(88)连接旋转驱动组件(87),旋转驱动组件(87)连接投料器装置(7)。
10.根据权利要求1所述的装车机器人横移机构,其特征在于:所述横移小车(10)上连接有激光测距装置(6)。
技术总结
本技术公开了一种装车机器人横移机构,涉及装车机横移设施技术领域,结构包括框架装置,框架装置包括矩形的框架主体组件;所述框架主体组件上活动设有横移小车,横移小车的底部连接投料机械手,投料机械手活动连接投料器装置。本技术的横移机构匹配装车机器人,实现装车机多角度、全方位的投料需求;横移机构的横向移动行程长,并使左右两边机械手可越中线行走,满足车厢内宽2.6米以下及围栏高2米及以下车辆投横竖料包的需要以及货车车厢前部有升降油缸装置的测量。通过本技术可保证装车机的投料高度、宽度和码垛效率,满足客户对效率的需求;准确完成落包工序,落包姿态优,料包不易滑移。
技术研发人员:卢世昌,白轩徽,伍梅山,阳晓晖
受保护的技术使用者:广州市意诺仕智能设备有限公司
技术研发日:20230517
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!