一种药品包装箱高架输送四通道上料装置的制作方法
本技术涉及自动化生产制造设备的,具体为一种药品包装箱高架输送四通道上料装置。
背景技术:
1、众所周知,医药仓库往往需要对药品不断的进行堆垛以及取货,药品经营质量管理规范实施细则(gsp实施细则)中第三十九条规定:药品堆垛应留有一定距离。药品与墙、屋顶(房梁)的间距不小于30厘米,与库房散热器或供暖管道的间距不小于30厘米,与地面的间距不小于10厘米。
2、传统的医药仓库都是通过库管人员徒手搬抬药品对药品进行堆垛,当堆垛到较高位置时,通过库管人员使用扶梯对药品进行堆垛,这不仅导致堆垛效率低,同时也会增加人员坠落的风险,导致使用实用性较差。
3、因此,现有技术还有待改进。
技术实现思路
1、本实用新型的目的在于提供一种药品包装箱高架输送四通道上料装置,以解决上述背景技术中提出的问题。
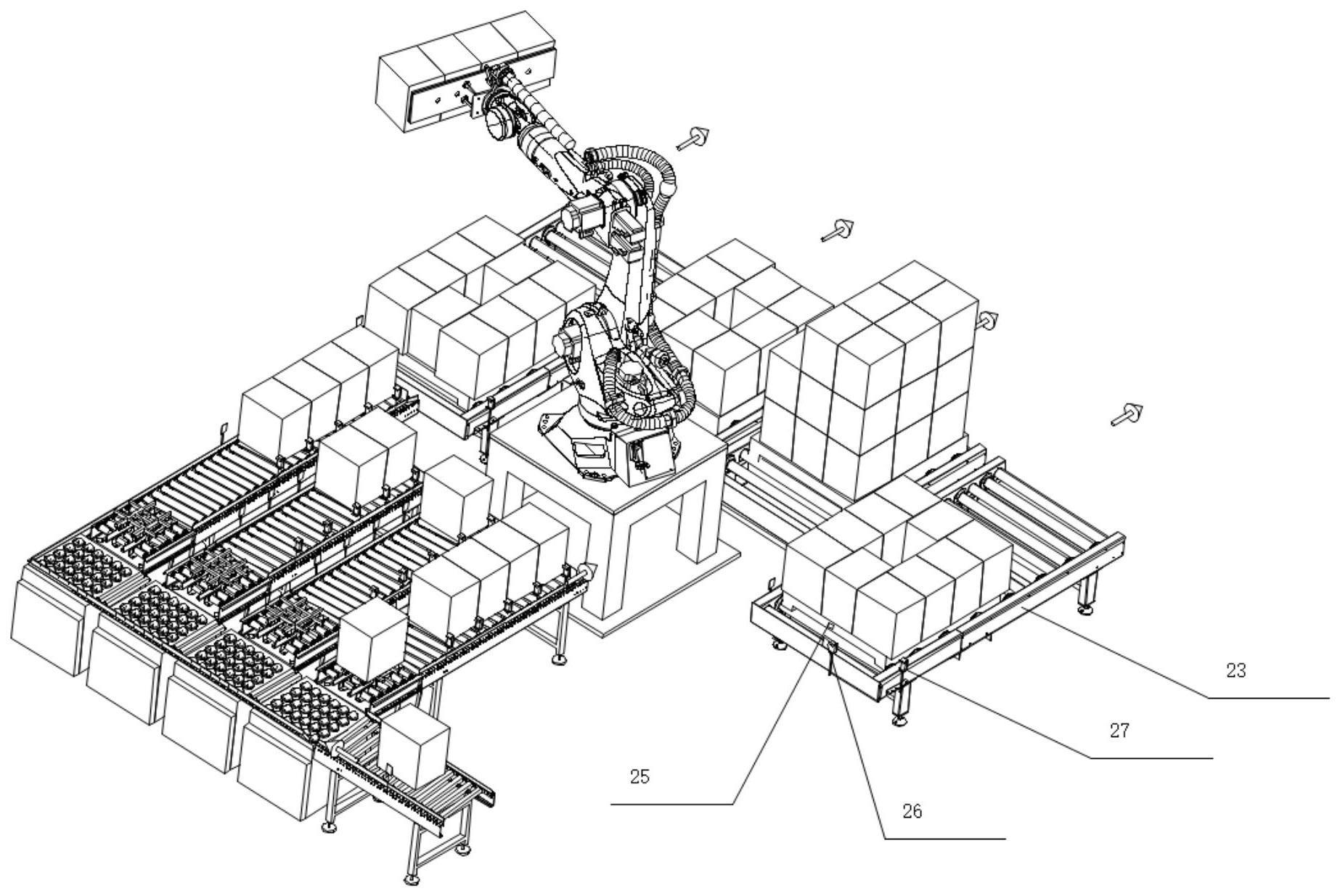
2、为实现上述目的,本实用新型提供如下技术方案:一种药品包装箱高架输送四通道上料装置,用于运送药品包装箱,包括上料排列装置、转运机器人和下料堆垛装置,所述转运机器人一端与所述上料排列装置连接,另一端与所述下料堆垛装置连接。
3、作为优选,所述上料排列装置包括上料电辊筒线;
4、与所述上料电辊筒线分别垂直设置的第一电辊筒支线、第二电辊筒支线、第三电辊筒支线和第四电辊筒支线,所述第一电辊筒支线上设置有第一顶升旋转机构,所述第二电辊筒支线上设置有第二顶升旋转机构,所述第三电辊筒支线上设置有第三顶升旋转机构,所述第四电辊筒支线上设置有第四顶升旋转机构;
5、所述第一电辊筒支线、第二电辊筒支线、第三电辊筒支线和第四电辊筒支线具有相同的结构,所述第一电辊筒支线包括支线本体和均匀设置在支线本体上的辊筒,所述支线本体两侧设置有用于包装箱位置感应的多个光电传感器;
6、所述上料电辊筒线与所述第一电辊筒支线交接处设置有第一摆轮机构,所述上料电辊筒线与所述第二电辊筒支线交接处设置有第二摆轮机构,所述上料电辊筒线与所述第三电辊筒支线交接处设置有第三摆轮机构,所述上料电辊筒线与所述第四电辊筒支线交接处设置有第四摆轮机构,所述第一电辊筒支线、第二电辊筒支线、第三电辊筒支线和第四电辊筒支线依次均匀间距排列。
7、作为优选,所述第一摆轮机构、第二摆轮机构、第三摆轮机构和第四摆轮机构具有相同的结构,所述第一摆轮机构、第二摆轮机构、第三摆轮机构和第四摆轮机构均偏摆正负90°角度,所述第一摆轮机构包括若干均布的分拣模组,所述分拣模组包括一摆动架,所述摆动架内均形成有容纳空间,所述容纳空间内枢装有至少一个输送辊;所述摆动架的顶面固定安装有用于将输送辊限制在容纳空间内的圆形盖,该圆形盖上开设有贯通口,所述输送辊的承载侧自该贯通口穿过,且露出于所述圆形盖的顶面。
8、作为优选,所述第一顶升旋转机构、第二顶升旋转机构、第三顶升旋转机构和第四顶升旋转机构具有相同的结构,所述第一顶升旋转机构、第二顶升旋转机构、第三顶升旋转机构和第四顶升旋转机构的转动角度为正负90°角度转向,所述顶升旋转机构包括升降驱动装置、设置于所述升降驱动装置输出端上的旋转驱动装置、设置于所述旋转驱动装置输出端上的旋转器;所述旋转驱动装置的输出端竖直向上,所述旋转器的设置方向与所述旋转驱动装置的输出端方向相同;所述旋转器用于顶起料盘并进行旋转。
9、作为优选,所述上料电辊筒线、第一电辊筒支线、第二电辊筒支线、第三电辊筒支线和第四电辊筒支线上的斜辊筒与所述药品包装箱的运行方向均成偏摆角度5-10度。
10、作为优选,所述转运机器人包括底座、机器人本体和真空机械手,所述机器人本体与所述底座固定连接,所述真空机械手与所述机器人本体可活动连接,所述真空机械手包括底座、与底座连接的驱动手臂和真空机械夹具,所述真空机械夹具通过法兰与所述驱动手臂连接,所述真空机械夹具包括吸附盘、真空吸盘和真空管道,所述吸附盘和所述法兰连接,所述吸附盘上设置有多个均匀分布的真空吸盘,所述真空管道一端与所述真空机械手的驱动手臂连接,另一端与所有的真空吸盘连接,且所述真空管道贯穿所述吸附盘设置。
11、作为优选,所述下料堆垛装置包括与上料排列装置对应的第一托盘链轮辊筒线、第二托盘链轮辊筒线、第三托盘链轮辊筒线和第四托盘链轮辊筒线,所述第一托盘链轮辊筒线包括架体和设置在架体上的多根辊筒,所述多根辊筒上设置有托盘,所述托盘上设置有托盘标签,所述架体上设置有托盘标签读码相机,所述托盘标签读码相机与所述托盘标签对应设置,所述第一托盘链轮辊筒线、第二托盘链轮辊筒线、第三托盘链轮辊筒线和第四托盘链轮辊筒线的结构相同。
12、作为优选,所述架体上还设置有用于感应托盘的托盘光电传感器。
13、作为优选,所述上料排列装置、转运机器人和下料堆垛装置分别容置于封闭空间内进行工作。
14、与现有技术相比,本实用新型的有益效果:可自动排列药品包装箱,堆垛成型,无需人工操作,也不需要人工攀爬处理,效率高,安全性强。
技术特征:
1.一种药品包装箱高架输送四通道上料装置,用于运送药品包装箱,其特征在于,包括上料排列装置、转运机器人和下料堆垛装置,所述转运机器人一端与所述上料排列装置连接,另一端与所述下料堆垛装置连接;
2.根据权利要求1所述的一种药品包装箱高架输送四通道上料装置,其特征在于,所述第一摆轮机构、第二摆轮机构、第三摆轮机构和第四摆轮机构具有相同的结构,所述第一摆轮机构、第二摆轮机构、第三摆轮机构和第四摆轮机构均偏摆正负90°角度,所述第一摆轮机构包括若干均布的分拣模组,所述分拣模组包括一摆动架,所述摆动架内均形成有容纳空间,所述容纳空间内枢装有至少一个输送辊;所述摆动架的顶面固定安装有用于将输送辊限制在容纳空间内的圆形盖,该圆形盖上开设有贯通口,所述输送辊的承载侧自该贯通口穿过,且露出于所述圆形盖的顶面。
3.根据权利要求1所述的一种药品包装箱高架输送四通道上料装置,其特征在于,所述第一顶升旋转机构、第二顶升旋转机构、第三顶升旋转机构和第四顶升旋转机构具有相同的结构,所述第一顶升旋转机构、第二顶升旋转机构、第三顶升旋转机构和第四顶升旋转机构的转动角度为正负90°角度转向,所述顶升旋转机构包括升降驱动装置、设置于所述升降驱动装置输出端上的旋转驱动装置、设置于所述旋转驱动装置输出端上的旋转器;所述旋转驱动装置的输出端竖直向上,所述旋转器的设置方向与所述旋转驱动装置的输出端方向相同;所述旋转器用于顶起料盘并进行旋转。
4.根据权利要求1所述的一种药品包装箱高架输送四通道上料装置,其特征在于,所述上料电辊筒线、第一电辊筒支线、第二电辊筒支线、第三电辊筒支线和第四电辊筒支线上的斜辊筒与所述药品包装箱的运行方向均成偏摆角度5-10度。
5.根据权利要求1所述的一种药品包装箱高架输送四通道上料装置,其特征在于,所述转运机器人包括底座、机器人本体和真空机械手,所述机器人本体与所述底座固定连接,所述真空机械手与所述机器人本体可活动连接,所述真空机械手包括底座、与底座连接的驱动手臂和真空机械夹具,所述真空机械夹具通过法兰与所述驱动手臂连接,所述真空机械夹具包括吸附盘、真空吸盘和真空管道,所述吸附盘和所述法兰连接,所述吸附盘上设置有多个均匀分布的真空吸盘,所述真空管道一端与所述真空机械手的驱动手臂连接,另一端与所有的真空吸盘连接,且所述真空管道贯穿所述吸附盘设置。
6.根据权利要求1所述的一种药品包装箱高架输送四通道上料装置,其特征在于,所述下料堆垛装置包括与上料排列装置对应的第一托盘链轮辊筒线、第二托盘链轮辊筒线、第三托盘链轮辊筒线和第四托盘链轮辊筒线,所述第一托盘链轮辊筒线包括架体和设置在架体上的多根辊筒,所述多根辊筒上设置有托盘,所述托盘上设置有托盘标签,所述架体上设置有托盘标签读码相机,所述托盘标签读码相机与所述托盘标签对应设置,所述第一托盘链轮辊筒线、第二托盘链轮辊筒线、第三托盘链轮辊筒线和第四托盘链轮辊筒线的结构相同。
7.根据权利要求6所述的一种药品包装箱高架输送四通道上料装置,其特征在于,所述架体上还设置有用于感应托盘的托盘光电传感器。
8.根据权利要求1所述的一种药品包装箱高架输送四通道上料装置,其特征在于,所述上料排列装置、转运机器人和下料堆垛装置分别容置于封闭空间内进行工作。
技术总结
本技术涉及一种药品包装箱高架输送四通道上料装置,用于运送药品包装箱,包括上料排列装置、转运机器人和下料堆垛装置,所述转运机器人一端与所述上料排列装置连接,另一端与所述下料堆垛装置连接。本技术的有益效果:可自动排列药品包装箱,堆垛成型,无需人工操作,也不需要人工攀爬处理,效率高,安全性强。
技术研发人员:朱明栋,李文林,刘永刚,周满惠,刘丽云,叶金丽,郑中胜,闫玉坤
受保护的技术使用者:杭州民生健康药业股份有限公司
技术研发日:20230518
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!