主梁上料单元及光伏电站平单轴组串装配生产线的制作方法
本技术涉及一种主梁上料单元及光伏电站平单轴组串装配生产线,属于光伏电站组件组装。
背景技术:
1、建设375mw等规模的光伏电站时,满足发电量需装配978480块光伏面板,采用人工将光伏支架7装配成整体,而后再将光伏面板71安装在光伏支架的横梁72与压板76之间,见图7所示,再将作为主梁的平单轴75贯穿多个螺栓73与连接板74之间,仅这安装光伏面板71部分需普工16401人天,技工32802人天,叉车工3267台班,需采用光伏电站平单轴组串装配生产线替换纯人工施工。
2、在将作为主梁的平单轴75贯穿多个螺栓73与连接板74之间时,由于平单轴75长度较长,需采用吊装对齐光伏支架7的两根螺栓73之间再平行推入,现有技术吊装技术如中国专利公开号为cn214780217u的一种用于光伏支架整体吊装的专用吊具,公开技术为:包光伏支架的主梁通过第二自卸吊钩与吊具中第二主吊梁相连接,吊车缓慢垂直起吊,待吊带整体绷紧后,可通过人工牵拉和吊臂移动相协作的方式;虽然,能实现对作为主梁的平单轴75进行吊装,但是,吊装对接时牵拉吊带会导致平单轴倾斜不能平行水平贯穿到多个光伏支架7的两根螺栓73之间。
技术实现思路
1、为解决上述技术问题,本实用新型提供了一种主梁上料单元及光伏电站平单轴组串装配生产线。
2、本实用新型通过以下技术方案得以实现。
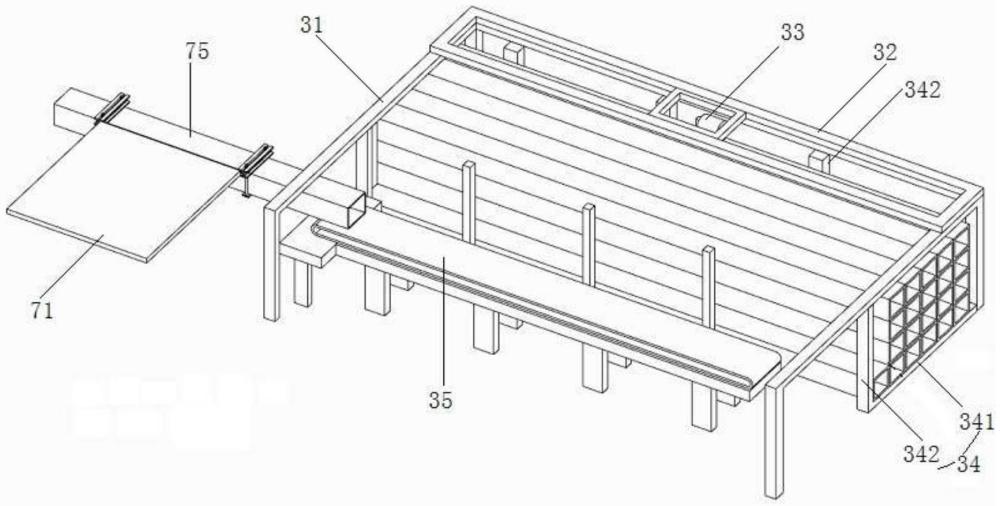
3、本实用新型提供的一种主梁上料单元,包括:
4、固定不动的桁架固定部;
5、桁架移动部,桁架移动部可前后移动安装在桁架固定部顶部;
6、桁架移动部上安装有对平单轴进行抓取的桁架抓取部;
7、能对平行水平状态平单轴进行输送的带式输送机,带式输送机安装在桁架固定部前侧下方空间。
8、所述桁架抓取部为桁架机器人。
9、所述桁架移动部通过电机驱动滚轮在桁架固定部顶部进行前后移动。
10、还包括对多根平单轴进行堆放的仓架。
11、所述仓架固定在桁架固定部后侧下方,多根平单轴堆放在仓架上。
12、所述仓架,包括:对平单轴重量进行承载的底框及限位杆。
13、所述底框处在桁架固定部后侧下方,限位杆固定在底框四周对多根平单轴放置静止状态进行限位。
14、处在底框前侧及左右侧的所述限位杆与桁架固定部固定,在多根平单轴放置在底框上后,多根平单轴产生的重量拉桁架固定部起到整体稳定作用。
15、一种光伏电站平单轴组串装配生产线,包括:
16、顶紧光伏支架中横梁两端的光伏成品装配单元;
17、将光伏支架完成装配并转运到光伏成品装配单元上的上料组对单元,上料组对单元位于光伏成品装配单元后侧;
18、还包括上述的主梁上料单元,主梁上料单元位于光伏成品装配单元右侧。
19、将多块光伏面板同步安装到横梁与压板之间的光伏板上料安装单元,光伏板上料安装单元位于光伏成品装配单元前侧。
20、本实用新型的有益效果在于:平单轴通过桁架抓取部抓取,桁架移动部带着抓取平单轴的桁架抓取部移动到桁架固定部前侧,桁架抓取部将平单轴以平行水平状态放在带式输送机上,带式输送机将平单轴以平行水平状态输送贯穿到多个光伏支架的两根螺栓之间,解决了吊带会导致平单轴倾斜不能平行水平贯穿到多个光伏支架的两根螺栓之间的问题。
技术特征:
1.一种主梁上料单元,其特征在于,包括:
2.如权利要求1所述的主梁上料单元,其特征在于:所述桁架抓取部(33)为桁架机器人。
3.如权利要求1所述的主梁上料单元,其特征在于:所述桁架移动部(32)通过电机驱动滚轮在桁架固定部(31)顶部进行前后移动。
4.如权利要求1所述的主梁上料单元,其特征在于:还包括对多根平单轴(75)进行堆放的仓架(34)。
5.如权利要求4所述的主梁上料单元,其特征在于:所述仓架(34)固定在桁架固定部(31)后侧下方,多根平单轴(75)堆放在仓架(34)上。
6.如权利要求4所述的主梁上料单元,其特征在于,所述仓架(34),包括:对平单轴(75)重量进行承载的底框(341)及限位杆(342)。
7.如权利要求6所述的主梁上料单元,其特征在于:所述底框(341)处在桁架固定部(31)后侧下方,限位杆(342)固定在底框(341)四周对多根平单轴(75)放置静止状态进行限位。
8.如权利要求7所述的主梁上料单元,其特征在于:处在底框(341)前侧及左右侧的所述限位杆(342)与桁架固定部(31)固定,在多根平单轴(75)放置在底框(341)上后,多根平单轴(75)产生的重量拉桁架固定部(31)起到整体稳定作用。
9.一种光伏电站平单轴组串装配生产线,其特征在于,包括:
技术总结
本申请公开了一种主梁上料单元及光伏电站平单轴组串装配生产线,所述主梁上料单元包括:固定不动的桁架固定部;桁架移动部,桁架移动部可前后移动安装在桁架固定部顶部;桁架移动部上安装有对平单轴进行抓取的桁架抓取部;能对平行水平状态平单轴进行输送的带式输送机,带式输送机安装在桁架固定部前侧下方空间。平单轴通过桁架抓取部抓取,桁架移动部带着抓取平单轴的桁架抓取部移动到桁架固定部前侧,桁架抓取部将平单轴以平行水平状态放在带式输送机上,带式输送机将平单轴以平行水平状态输送贯穿到多个光伏支架的两根螺栓之间,解决了吊带会导致平单轴倾斜不能平行水平贯穿到多个光伏支架的两根螺栓之间的问题。
技术研发人员:饶昌江,朱兆强,谭发均,雷毅,王有龙
受保护的技术使用者:中国电建集团贵州工程有限公司
技术研发日:20230523
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!