多层悬臂货叉联动机构及搬运装置的制作方法
本技术涉及仓储货叉,具体地涉及到一种多层悬臂货叉联动机构及搬运装置。
背景技术:
1、现有技术中,单层伸缩机构的悬臂货叉长度较长,很多狭窄环境使用空间有限,因此常通过简单的增加单层结构的导向长度来间接实现伸缩长度的增加,然而多层悬臂货叉多为链传动,使用精度较差且结构不紧凑,同时部分轻载需要精确伸缩定位,其场合使用受限。
技术实现思路
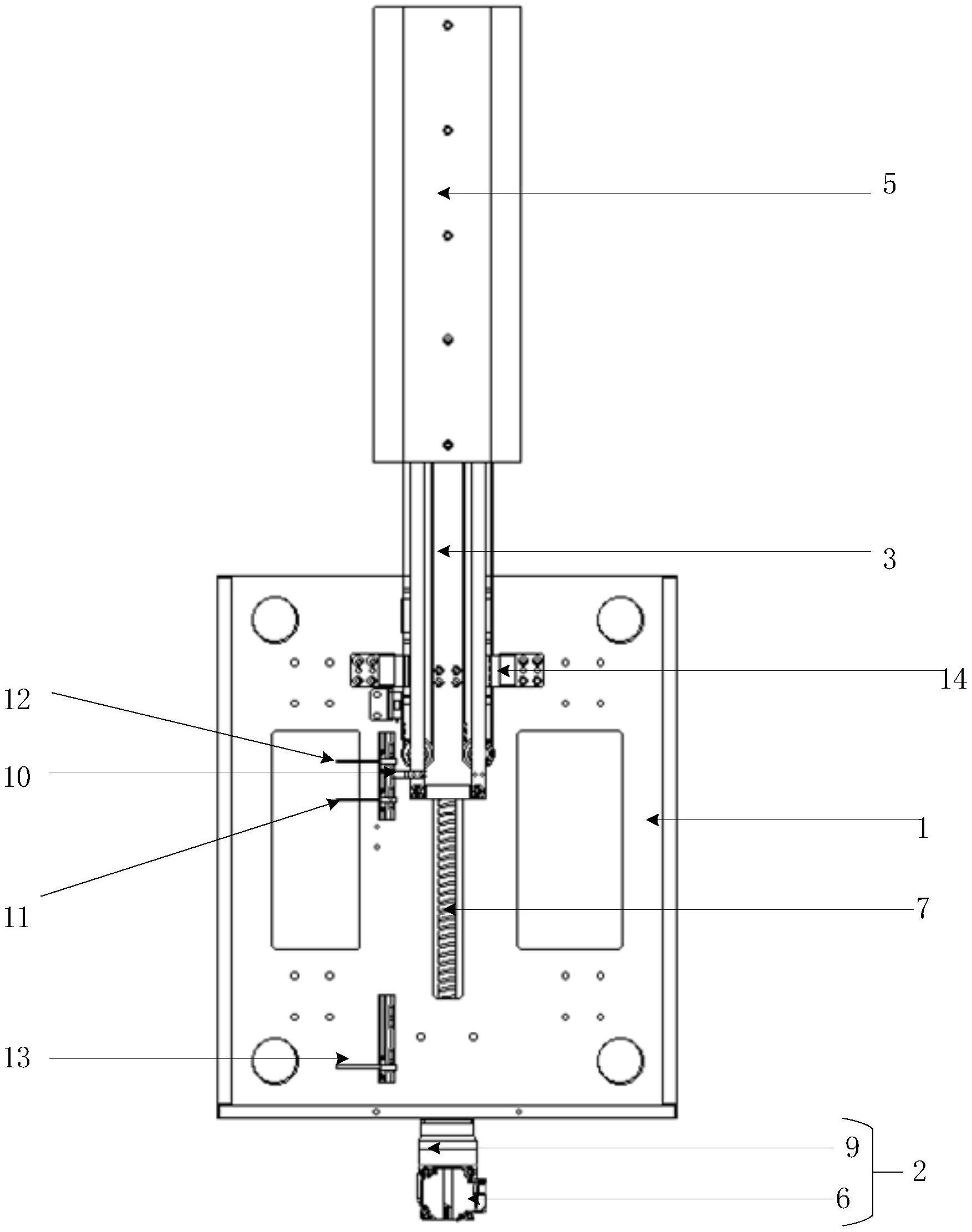
1、为了克服上述技术问题,本实用新型提供一种多层悬臂货叉联动机构及搬运装置。该联动机构通过一级伸缩货叉驱动同步带来控制二级伸缩货叉的同步伸缩,并通过光电传感器来精准控制一级伸缩货叉的位置,提高了货叉机构设备的可靠性,并能够降低人工搬运等成本,实现了伸缩货叉的分层折叠,缩短了伸缩货叉的长度,解决了货叉联动装置常见的结构不紧凑、精度差的问题,适用于狭窄空间。
2、为了实现上述目的,本实用新型一方面提供一种多层悬臂货叉联动机构包括:
3、货叉固定板;
4、驱动部,固定于所述货叉固定板上,用于启动以提供驱动力;
5、一级伸缩货叉,滑动固定于所述货叉固定板上,与所述驱动部连接,用于随着所述驱动部的转动而伸缩;
6、同步带,设置于所述一级伸缩货叉上,且所述同步带的长度方向与所述一级伸缩货叉的伸缩方向平行,且所述同步带的外侧与所述货叉固定板连接;
7、二级伸缩货叉,滑动固定于所述一级伸缩货叉上,且与所述二级伸缩货叉与所述同步带的内侧连接,在所述一级伸缩货叉伸展时,所述同步带的外侧向所述一级伸缩货叉伸展相反的方向拉动,所述同步带的内侧向所述一级伸缩货叉伸展相同的方向拉动,以带动所述二级伸缩货叉向所述一级伸缩货叉伸展相同的方向伸展。
8、优选地,所述驱动部包括:伺服电机,用于提供转动力;
9、滚珠丝杆,与所述伺服电机连接,用于随着所述伺服电机的转动而转动;
10、所述一级伸缩货叉包括固定连接件,所述固定连接件套设于所述滚珠丝杆上,用于随着所述滚珠丝杆的转动在所述滚珠丝杆上滑动。
11、优选地,所述驱动部包括减速机,与所述滚珠丝杆连接,用于在所述滚珠丝杆转动时,保证转速稳定。
12、优选地,所述联动机构还包括光电传感器,设置于所述一级伸缩货叉的至少一侧,且位于所述货叉固定板上;
13、所述一级伸缩货叉包括指示挡板,设置于所述一级伸缩货叉的侧面,用于与所述光电传感器配合,以指示所述一级伸缩货叉的位置。
14、优选地,所述光电传感器包括:
15、原位检测光电,用于检测所述一级伸缩货叉是否位于默认原位;
16、伸展极限位检测光电,设置于所述原位检测光电靠近所述一级伸缩货叉伸展方向的一侧,用于检测所述一级伸缩货叉是否已经伸展至极限位置;
17、收缩极限位检测光电,设置于所述原位检测光电靠近所述一级伸缩货叉收缩方向的一侧,用于检测所述一级伸缩货叉是否已经收缩至极限位置。
18、优选地,所述同步带为两个,所述二级伸缩货叉与两个所述同步带相近的内侧连接;所述货叉固定板包括同步带固定端连接件,所述同步带固定端连接件与两个所述同步带远离的外侧连接。
19、优选地,所述驱动部包括:伺服电机,用于转动以提供驱动力;
20、传动履带,与所述伺服电机和一级伸缩货叉连接,用于随着所述伺服电机的转动而带动所述一级伸缩货叉伸缩。
21、本实用新型另一方面提供一种搬运装置,所述搬运装置包括如上述任一所述的联动机构和机械抓手,所述机械抓手与所述联动机构的二级伸缩货叉连接。
22、通过上述技术方案,多层悬臂货叉联动机构及搬运装置可以通过驱动一级伸缩货叉来带动一级伸缩货叉上的同步带移动,间接驱动一级伸缩货叉上的二级伸缩货叉同步伸缩,并设置光电传感器去精准控制一级伸缩货叉的位置,实现了伸缩货叉的分层折叠,缩短了伸缩货叉的长度,提高了货叉机构设备的可靠性,并能够降低人工搬运等成本,解决了货叉联动装置常见的结构不紧凑、精度差的问题,适用于狭窄空间。
技术特征:
1.一种多层悬臂货叉联动机构,其特征在于,包括:
2.根据权利要求1所述的联动机构,其特征在于,所述驱动部包括:
3.根据权利要求2所述的联动机构,其特征在于,所述驱动部包括减速机,与所述滚珠丝杆连接,用于在所述滚珠丝杆转动时,保证转速稳定。
4.根据权利要求1所述的联动机构,其特征在于,所述联动机构还包括光电传感器,设置于所述一级伸缩货叉的至少一侧,且位于所述货叉固定板上;
5.根据权利要求4所述的联动机构,其特征在于,所述光电传感器包括:
6.根据权利要求1所述的联动机构,其特征在于,所述同步带为两个,所述二级伸缩货叉与两个所述同步带相近的内侧连接;
7.根据权利要求1所述的联动机构,其特征在于,所述驱动部包括:
8.一种搬运装置,其特征在于,所述搬运装置包括如权利要求1至7任一所述的联动机构和机械抓手,所述机械抓手与所述联动机构的二级伸缩货叉连接。
技术总结
本技术涉及仓储货叉技术领域,公开了一种多层悬臂货叉联动机构及搬运装置,包括货叉固定板;驱动部,提供驱动力;一级伸缩货叉,滑动固定于所述货叉固定板上,与所述驱动部连接,用于随着所述驱动部的转动而伸缩;同步带,设置于所述一级伸缩货叉上,同步带外侧连接所述货叉固定板;二级伸缩货叉,滑动固定于所述一级伸缩货叉上,连接同步带内侧;通过同步带来使得一级伸缩货叉驱动二级伸缩货叉同步同向伸缩,并设置光电传感器去精准控制一级伸缩货叉的位置,实现了伸缩货叉的分层折叠,缩短了伸缩货叉的长度,提高了货叉机构设备的可靠性,并能够降低人工搬运等成本,解决了货叉联动装置常见的结构不紧凑、精度差的问题,适用于狭窄空间。
技术研发人员:林巨广,胡成明,许登山,黄海涛
受保护的技术使用者:安徽巨一科技股份有限公司
技术研发日:20230519
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!