一种钩臂装置及作业机械的制作方法
本技术涉及作业机械领域,具体涉及一种钩臂装置及作业机械。
背景技术:
1、一些作业机械,例如钩臂车包括车体和设置在车体上的钩臂装置。钩臂装置包括支撑架、翻转架、主臂、举升油缸、锁紧油缸和锁紧结构。其中,翻转架铰接在支撑架的后端,主臂铰接在翻转架上,举升油缸的两端分别连接支撑架和主臂,锁紧油缸设置在翻转架上,锁紧结构设置在翻转架和主臂上,锁紧油缸动作带动锁紧结构动作,以将主臂锁紧在翻转架上,以使主臂与翻转架共同动作,或使主臂与翻转架脱开而单独动作。
2、钩臂车主要有钩箱、卸料和卸箱三种动作。钩箱时,主臂与翻转架脱开,举升油缸带动主臂单独动作;卸料时,锁紧油缸动作使锁紧结构锁紧主臂和翻转架,举升油缸带动主臂和翻转架共同翻转;卸箱时,锁紧油缸先动作使锁紧结构解除对主臂和翻转架的锁定,举升油缸再动作带动主臂翻转进行卸箱操作。
3、在卸箱或者卸料操作开始之后,锁紧油缸若由于误操作或者电器元件失灵等原因再进行动作,比如:在卸料过程开始后,锁紧油缸松开,会导致箱体的脱落;卸箱过程刚开始时,若锁紧油缸锁紧,会导致主臂的拉臂钩装置的损坏,造成极大的安全隐患。
技术实现思路
1、有鉴于此,本实用新型提供了一种钩臂装置及作业机械,以解决现有钩臂装置容易因误操作或电气失灵导致锁紧油缸在卸箱或卸料开始后锁紧油缸会再动作引起极大安全隐患的问题。
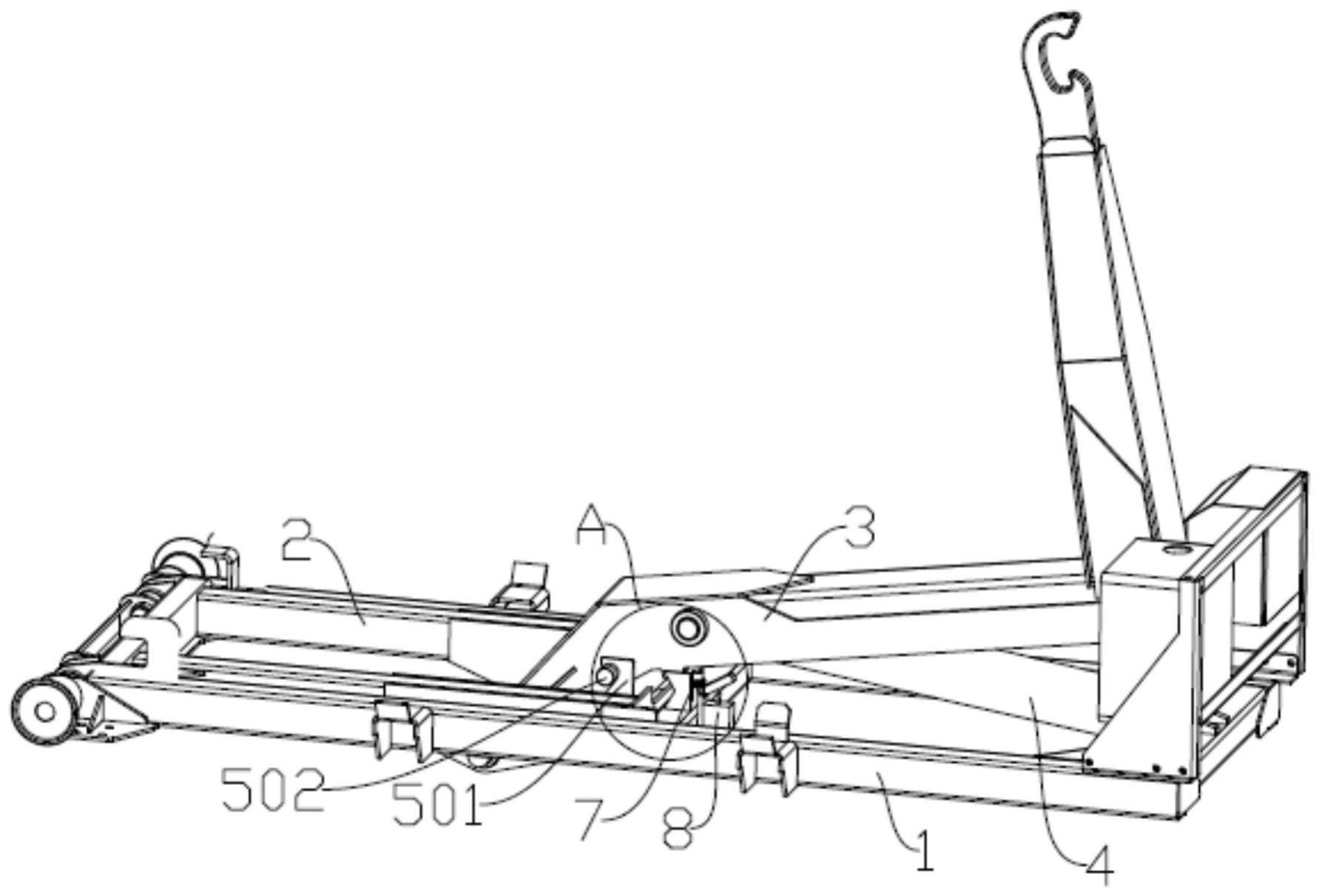
2、第一方面,本实用新型提供了一种钩臂装置,其包括支撑架、翻转架、主臂、举升驱动机构、锁紧结构、锁紧驱动机构、第一电器元件和机械控制开关。其中,翻转架一端铰接于支撑架的一端、另一端朝向支撑架的内侧延伸;主臂铰接于翻转架上;举升驱动机构的两端分别连接支撑架和主臂;锁紧结构设于翻转架与主臂之间;卸料状态,锁紧结构将主臂锁定在翻转架上;钩箱和卸箱状态,锁紧结构解除对主臂的锁定;锁紧驱动机构设于翻转架上;锁紧驱动机构带动锁紧结构动作以使锁紧结构锁定主臂或解除对主臂的锁定;第一电器元件设于支撑架上并位于主臂的下侧;机械控制开关设于支撑架上并位于主臂的下侧;机械控制开关的触头朝向主臂;机械控制开关适于连接锁紧驱动机构的锁紧压力传动管路;举升驱动机构驱动主臂在按压触头与脱离触头之间切换;举升驱动机构、锁紧驱动机构和第一电器元件适于与控制器通信连接,控制器适于与钩臂装置的操作盒通信连接。
3、此结构的钩臂装置,钩臂装置通过第一电器元件和机械控制开关进行双重保护,当主臂升起时,机械控制开关断开,锁紧压力传动管路则断开,第一电器元件和操作盒失效,以有效防止在卸料或卸箱过程中电器失效或操作人员误操作导致锁紧驱动机构再动作,防止箱体脱落、损坏拉臂钩,同时可提高钩臂装置工作安全性。
4、在一种可选的实施方式中,机械控制开关为行程阀。行程阀结构简单,工作稳定可靠。
5、在一种可选的实施方式中,锁紧压力传动管路上设有第一电磁阀,第一电磁阀为三位四通电磁阀,第一电磁阀的进口连通介质供给箱,第一电磁阀的第一工作口连接锁紧驱动机构的第一工作腔,机械控制开关的进口连接锁紧驱动机构的第二工作腔,机械控制开关的出口连接第一电磁阀的第二工作口,第一电磁阀的出口连接介质供给箱。
6、在一种可选的实施方式中,锁紧驱动机构为锁紧油缸或锁紧气缸,机械控制开关的进口连接锁紧驱动机构的有杆腔,第一电磁阀的第一工作口连接锁紧驱动机构的无杆腔。
7、在一种可选的实施方式中,举升驱动机构为举升油缸,锁紧驱动机构为锁紧油缸,锁紧压力传动管路为锁紧油路,介质供给箱为油箱。举升油缸和锁紧油缸均通过液压传动动作,液压传动负载能力高,以保证锁紧油缸的锁紧效果,提高举升油缸的负载能力。
8、在一种可选的实施方式中,第一电器元件为接近开关、行程开关或倾角传感器。在一种可选的实施方式中,锁紧结构包括锁定部和配合部,锁定部可转动地设于翻转架上;配合部固定设于主臂上;锁紧驱动机构的驱动端连接锁定部,锁紧驱动机构驱动锁定部朝向配合部转动以使锁定部卡接固定在配合部上,或锁紧驱动机构驱动锁定部背向配合部转动以使锁定部解除对配合部的锁定。锁紧结构结构简单,工作可靠,能够将主臂牢固地锁紧在翻转架上。
9、在一种可选的实施方式中,锁紧结构还包括转动轴和连接件,转动轴可转动地设于翻转架上;锁定部固定设于转动轴上;连接件的一端固定设于转动轴上,另一端连接锁紧驱动机构。
10、第二方面,本实用新型还提供了一种作业机械,包括车体和上述的钩臂装置,支撑架设于车体上。因作业机械包括钩臂装置,具有与钩臂装置相同的效果,在此不再赘述。
11、在一种可选的实施方式中,作业机械包括车厢可卸式垃圾车。
技术特征:
1.一种钩臂装置,其特征在于,包括:
2.根据权利要求1所述的钩臂装置,其特征在于,所述机械控制开关(8)为行程阀。
3.根据权利要求1或2所述的钩臂装置,其特征在于,所述锁紧压力传动管路上设有第一电磁阀(901),所述第一电磁阀(901)为三位四通电磁阀,所述第一电磁阀(901)的进口连通介质供给箱,所述第一电磁阀(901)的第一工作口连接所述锁紧驱动机构(6)的第一工作腔,所述机械控制开关(8)的进口连接所述锁紧驱动机构(6)的第二工作腔,所述机械控制开关(8)的出口连接所述第一电磁阀(901)的第二工作口,所述第一电磁阀(901)的出口连接所述介质供给箱。
4.根据权利要求3所述的钩臂装置,其特征在于,所述锁紧驱动机构(6)为锁紧油缸或锁紧气缸,所述机械控制开关(8)的进口连接所述锁紧驱动机构(6)的有杆腔,所述第一电磁阀(901)的第一工作口连接所述锁紧驱动机构(6)的无杆腔。
5.根据权利要求4所述的钩臂装置,其特征在于,所述举升驱动机构(4)为举升油缸,所述锁紧驱动机构(6)为锁紧油缸,所述锁紧压力传动管路为锁紧油路,所述介质供给箱为油箱。
6.根据权利要求1或2所述的钩臂装置,其特征在于,所述第一电器元件(7)为接近开关、行程开关或倾角传感器。
7.根据权利要求1或2所述的钩臂装置,其特征在于,所述锁紧结构包括:
8.根据权利要求7所述的钩臂装置,其特征在于,所述锁紧结构还包括:
9.一种作业机械,其特征在于,包括:
10.根据权利要求9所述的作业机械,其特征在于,所述作业机械包括车厢可卸式垃圾车。
技术总结
本技术涉及作业机械术领域,公开了一种钩臂装置及作业机械,本技术的钩臂装置包括支撑架、翻转架、主臂、举升驱动机构、锁紧结构、锁紧驱动机构、第一电器元件和机械控制开关。其中,第一电器元件设于支撑架上并位于主臂的下侧;机械控制开关设于支撑架上并位于主臂的下侧;机械控制开关的触头朝向主臂;机械控制开关适于连接锁紧驱动机构的锁紧压力传动管路。此结构的钩臂装置,当主臂升起时,机械控制开关断开,锁紧压力传动管路则断开,第一电器元件和操作盒失效,以有效防止在卸料或卸箱过程中操作人员误操作导致锁紧驱动机构再动作,防止箱体脱落、损坏拉臂钩,同时可提高钩臂装置工作安全性。
技术研发人员:廖扬剑,黄达焱,王凯伦
受保护的技术使用者:三一环境产业有限公司
技术研发日:20230525
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!